一种基于模糊逻辑优先级的雷达任务自适应调度算法
2013-08-16郭坤鹏薛安克
郭坤鹏, 左 燕, 薛安克
(1.杭州电子科技大学信息与控制研究所,浙江杭州310018)
多功能相控阵雷达是近几十年来逐渐发展成熟的先进雷达体制。由于阵列天线的波束捷变能力,多功能相控阵雷达可对多个目标交替进行搜索、验证、跟踪等操作[1]。为此,需要提供一种雷达资源调度策略以有效分配雷达时间、能量等资源,达到优化雷达整体性能的目的。如何制定合理有效的调度策略成为相控阵雷达发挥强大能力的关键。
相控阵雷达资源调度策略的设计方法有多种,常用的有固定模板、多模板、部分模板和自适应调度模板[1]。当前针对多功能相控阵雷达,自适应调度算法是最有效和最灵活的设计方法。早期的自适应调度方法多采用某一规则对雷达任务按固定优先级由高到低依次进行调度,包括工作方式优先级最高优先、截止时间最早优先(Earliest Deadline First,EDF)等[2]。卢建斌等[3]在此基础上提出的将工作方式优先级和任务截止期合并考虑作为任务的综合优先级的调度算法。上述自适应调度方法,当多个雷达任务请求竞争同一执行时间段时,只调度执行高优先级任务请求,低优先级的任务请求被删除。为此,Huizing等[4]首次提出了任务请求时间窗的概念,即雷达任务请求的实际执行时间可在其期望发射时间范围内的一个时间窗中移动。文献[5-7]对有时间窗的任务调度进行了数学建模,并分别用二次规划和遗传算法进行求解。
已有的雷达调度策略中大部分采用固定优先级次序,即直接给定雷达各种工作方式的优先级,很少有任务优先级随实际情况变化的目标场景分析。随着战场环境的日益复杂,为适应目标环境变化情况,文中提出了一种基于模糊逻辑优先级的雷达任务自适应调度算法。将模糊逻辑推理器引入自适应调度算法,根据目标的运动状态和属性等信息对其优先级在线动态确定。并结合时间窗的特点提出调整相邻冲突任务的一步回溯的自适应调度算法,改善调度性能。
1 基于模糊逻辑的优先级确定
1.1 语义变量的模糊化处理
传统雷达任务的优先级都是根据操作经验制定的,如精密跟踪具有较高的优先级,普通搜索具有较低的优先级。而对跟踪任务而言,任务的优先级通常与跟踪目标的5个因素有关,即威胁程度、敌对程度、跟踪质量、目标相对位置和目标上的武器系统。其具体涵义如下[8-10]:
1)威胁程度。目标的威胁程度由目标的轨迹和身份确定。而目标的轨迹包含4个变量,即目标高度、目标机动性、绝对速度和径向速度。通常情况下,低空、高机动性、高速运动目标具有更高的威胁程度。另外、即使是友邻目标当接近雷达平台时也有可能存在威胁。
2)敌对程度。它是一个模糊描述,对应着4个变量:目标距离、目标速度、目标身份以及目标的接近程度。在模糊决策中,目标距离被模糊化对应于不同的优先级,距离越近其优先级越高;目标身份表示目标可能为敌对方的概率,因此概率越大目标优先级越高;目标的接近程度以目标径向速度与绝对速度的比值表示,这个比值越大表明目标的接近程度越大,因此该目标的优先级就会越高。
3)跟踪质量。是指目标预测未知的精度。如果目标跟踪过程中预测位置的误差很小,则说明跟踪质量较高。然而,较大的位置误差和检测丢失都会导致跟踪质量的下降。此时,目标的优先级应当提高,以提升目标位置预测的精度。
4)目标位置。由目标距离和目标方位综合表示。通常近距离意味着高的优先级,因为目标可能处于被精密跟踪锁定的区域。目标方位用以表示目标跟踪开始的方位与目标期望被检测到的方位关联性。
5)武器系统。该目标携带的武器系统对于雷达平台的威胁程度或打击程度。
在模糊逻辑推理过程前需要对以上5个语义变量进行模糊化赋值,具体见表1。

表1 模糊变量和模糊值Tab.1 Fuzzy variables and fuzzy values
1.2 模糊逻辑系统的建立
典型模糊逻辑系统主要由以下几部分构成:①输入与输出语言变量,包括语言值及其隶属度函数;②模糊规则;③输入量的模糊化方法和输出量的去模糊化方法;④模糊推理算法。
基于标准模型的模糊逻辑系统如图1所示。

图1 基于标准模型的模糊逻辑系统的原理Fig.1 Principle of the fuzzy logic system based on the standard model
输入输出隶属度函数选择较为简单的三角形和梯形隶属度函数。假设敌对程度和威胁程度的变化范围都为0~1,当等于0时分别表示敌对程度低即非敌对目标以及威胁程度非常低,逐渐变化到等于1时表示敌对程度高即敌对目标以及威胁程度非常高。假设目标位置变化范围在0~200 km,优先级变化范围是0~1,则优先级的隶属度函数如图2~图5所示。

图2 敌对程度的隶属度函数Fig.2 Membership function of hostile

根据排列组合可以知道,推理规则可以有45条IF-THEN规则。根据专家先验知识制定规则。如:
if(敌对程度 is非敌对目标)and(位置 is远)and(威胁程度is非常低)then(优先级is非常低);
if(敌对程度 is敌对目标)and(位置 is中)and(威胁程度is低)then(优先级is中);
if(敌对程度 is敌对目标)and(位置 is近)and(威胁程度is非常高)then(优先级is非常高)。
……
1.3 仿真
为了检验基于模糊逻辑确定优先级的有效性,通过MATLAB软件进行仿真。设置仿真场景如下:
假设有3个目标的速度分别为700,500和300 m/s,分别距离雷达250,200和120 km,武器系统威胁程度均为0.6,敌对程度分别为敌方、未知和敌对。3个目标的与雷达的变化曲线以及得到的优先级分别如图6和图7所示。
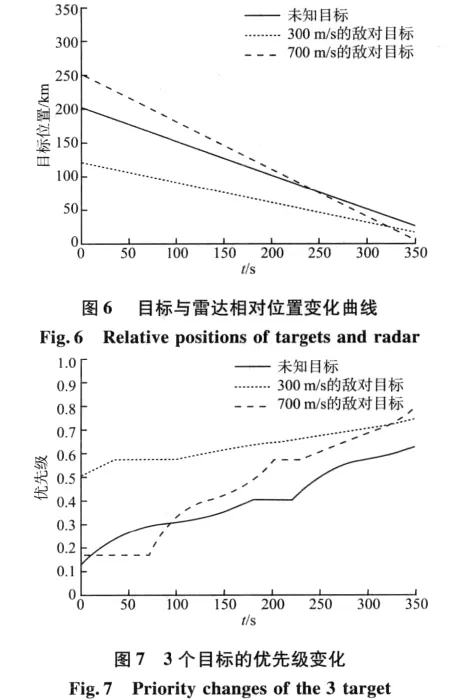
由图6~图7可以看出,随着目标位置离雷达越近,其优先级也开始变高。相比传统的固定工作方式优先级,文中设计的优先级算法具有更好的自适应性。当距离相同时,速度快的以及威胁程度高的将被赋予更高的优先级。这也比较符合实际中的应用。在战场上,雷达将对速度高(导弹,超音速战斗机),携带武器系统更致命的目标给与最高的优先级,使其在任务调度的时候能够保证被优先调度。
2 基于模糊逻辑优先级的有时间窗的自适应调度算法
2.1 时间窗的基本概念
相控阵雷达能够在搜索的同时进行多目标跟踪、制导等多种事件的操作,为此需要计算机对各种事件进行有序高效合理的调度。在事件调度中,不免会发生多个事件竞争同一时间窗的情况。这种情况下,一种处理办法是给各类事件分配优先级,优先级高的事件优先得到调度;另一种办法就是给各类事件设置时间窗,时间窗为雷达事件的实际执行时间在期望发射时间前后能移动的有效范围。事件在时间窗范围内得到执行都是有效的,通过时间窗的调整,调度程序可以更灵活地调度雷达事件,使原本冲突的事件都可以得到执行。这样既能增加调度的成功率,又可提高时间资源的利用率。文献[11]对时间窗存在的合理性进行了分析,通过α-β滤波证明,当跟踪事件推迟或提前ΔT执行,预测值与量测值误差的绝对值,即残差的绝对值将可能增大,但是当残差增大到一定范围时,真实量测值依然以很高的概率落入跟踪波门内。因此可以得到,时间窗的存在来自于雷达数据处理中跟踪波门的空间性所造成的残差绝对值的可增大量,即实现空间向时间的转换。
2.2 一步回溯自适应调度算法设计
根据时间窗存在的特点,传统的有时间窗的自适应调度算法都选择将有冲突的任务在时间窗范围内向后推移。文中根据时间窗的特点提出对比前后冲突任务的优先级进行一步回溯的自适应调度,在保证调度率的基础上确保高优先级的任务在其期望时刻得到调度,以降低调度代价为目的。本调度算法实现步骤如下:
1)初始化,随机生成一组X个雷达任务。
2)根据雷达任务的属性用模糊逻辑智能系统确定任务的优先级。
3)将雷达任务按照请求开始时间从小到大进行排序,得到调度排列S。
4)将S中的第一个任务放到虚拟序列Q中,令k=1,i=2。
5)如果S(i)开始时间大于等于Q(k)任务的结束时间,则转10);否则计算两个任务的重叠时间t,如果t小于时间窗范围,转6);如果t大于时间窗范围,令 i=i+1,转5)。
6)如果S(i)的优先级大于Q(k)的优先级,转7);否则,转 8)。
7)如果Q(k)的开始时间与Q(k-1)的完成时刻之间的空闲时间大于等于t,任务Q(k)的开始时间提前t,转10);反之,转8)。
8)如果S(i)的完成时刻与S(i+1)的开始时刻之间的空闲时间大于等于t,S(i)新的开始时间往后推移t,转10);否则,转9)。
Design of Improved ADRC for Drum Water Level Regulation of Ship Boiler
9)如果S(i)的优先级大于S(i+1),S(i)新的开始时间往后推移t,转10);反之,将S(i)送入删除队列。
10)令 Q(k+1)=S(i),如果i=M,结束;否则,令 k=k+1,i=i+1,转5)。
根据算法实现过程可知,在对任务进行依次调度时,每当任务相冲突的时候,前后一步回溯的调度算法都能将当前任务依次与已调度的任务和下一个等待调度的任务相比较,当时间窗允许时,总是将优先级高的任务在其期望时刻,或者以偏移较小的时间调度优先级较高的任务。
2.3 仿真
设定仿真场景为150 ms,随机生成25个任务,任务驻留时间为3~6 ms,时间窗为20 ms,将文中所提自适应调度算法与传统无时间窗自适应调度算法及有时间窗自适应调度算法进行比较。仿真结果如图8所示。

图8 仿真结果Fig.8 Simulation result
由图8可以看出,文中所提的带时间窗的自适应调度算法调度率和传统带时间窗的自适应调度算法雷达任务调度率均为90%以上,且相差不大。但不同算法下各任务的执行时间不同。定义一个性能评价函数:

式中:pri为任务i的优先级;tsi,tei分别为任务i的实际执行时间和期望执行时间。
分别进行多次仿真实验,得到文中提出带时间窗的自适应调度算法和传统带时间窗的自适应调度算法性能比较结果,具体见表2。

表2 自适应调度算法调度性能比较Tab.2 Comparision of the scheduling performance
由表2可以知,文中所提自适应调度算法中整体调度性能优于传统自适应调度算法。在文中所提的自适应调度算法中,更多高优先级的任务在其期望的时间内被调度。
3 结语
文中提出了一种基于模糊逻辑优先级的雷达任务自适应调度算法。该方法根据目标的运动状态和属性等信息对其优先级在线动态确定。将模糊逻辑优先级确定引入自适应调度算法,并结合时间窗的特点调整相邻冲突任务,提出有时间窗的一步回溯自适应调度方法。该算法能够更好地保证优先级高的任务在其期望时间被调度,整体的调度性能优于传统的有时间窗自适应调度方法,调度率不低于传统的有时间窗调度方法。仿真验证了算法的有效性。
文中对于搜索任务的优先级没有进行考虑,并且在调度时没有考虑计算机资源和雷达能量资源的约束,这些问题有待进一步的研究。
[1]张伯彦,蔡庆宇.相控阵雷达自适应调度和多目标数据处理技术[J].电子学报,1997,25(9):1-5.ZHANG Bo-yan,CAI Qing-yu.Adaptive scheduling and multitarget data processing techniques of phased array radars[J].Acta Electronica Sinica,1997,25(9):1-5.(in Chinese)
[2]Gopalakrishnan S,Caccamo M,Shih C S.Finite-horizon scheduling of radar dwells with online template construction[C]//Proc of 25th IEEE International Real-Time Systems Symposium.Lisbon,Portugal:IEEE,2004:23-33.
[3]卢建斌,胡卫东,郁文贤.多功能相控阵雷达实时任务调度研究[J].电子学报,2006,34(4):732-736.LU Jian-bin,HU Wei-dong,YU Wen-hui.Study on real-time task scheduling of multifunction phased array radars[J].Acta Electronica Sinica,2006,34(4):732-736.(in Chinese)
[4]Orman A J,Potts C N,Shahani A K,et al.Scheduling for a multifunction phased array radar system[J].European Journal of Operational Research,1996,90(1):13-25.
[5]周颖,王国玉,王雪松,等.基于启发式混合遗传算法的相控阵雷达最优化调度[J].系统工程与电子技术,2006,28(7):992-996,1005.ZHOU Ying,WANG Guo-yu,WANG Xue-song,et al.Optimal scheduling using hybrid GA with heuristic rules for phased array radar[J].Systems Engineering and Electronics,2006,28(7):992-996,1005.(in Chinese)
[6]卢建斌,胡卫东,郁文贤.多功能相控阵雷达实时驻留的自适应调度算法[J].系统工程与电子技术,2005,27(12):1981-1984,1987.LU Jian-bin,HU Wei-dong,YU Wen-xian.Adaptive scheduling algorithm for real-time dwells in multifunction phased array radars[J].Systems Engineering and Electronics,2005,27(12):1981-1984,1987.(in Chinese)
[7]赵宇,李建勋,曹兰英,等.基于二次规划的相控阵雷达任务自适应调度算法[J].系统工程与电子技术,2012,34(4):698-703.ZHAO Yu,LI Jian-xun,CAO Lan-ying,et al.Adaptive scheduling algorithm based on quadratic programming for multifunction phased ar ray radars[J].Systems Engineering and Electronics,2012,34(4):698-673.(in Chinese)
[8]胡卫东,郁文贤,卢建斌,等.相控阵雷达资源管理的理论与方法[M].北京:国防工业出版社,2010:204-215.
[9]Miranda S,Baker C,Woodbridge K,et al.Fuzzy logic approach for prioritisation of radar tasks and sectors of surveillance in multifunction radar[J].IET Radar,Sonar and Navigation,2007,1(2):131-141.
[10]Miranda S,Baker C,Woodbridge K,et al.Knowledge-based resource management for multifunction radar:a look at scheduling and task prioritization[J].IEEE Signal Processing Magazine,2006,23(1):66-76.
[11]何金新,邱杰,王国宏.相控阵雷达事件调度中的时间窗研究[J].雷达科学与技术,2010,8(1):80-86.HE Jin-xin,QIU Jie,WANG Guo-hong.Study on window in multifunction phased array radar task scheduling[J].Radar Science and Technology,2010,8(1):81-86.(in Chinese)