DSRC通信系统架构设计与实现
2013-08-16于东辉
向 昊 于东辉
(重庆邮电大学自动化学院,中国重庆400065)
0 引言
21 世纪将是公路交通智能化的世纪, 人们将要采用的智能交通系统, 是一种先进的一体化交通综合管理系统。 ITS 是智能交通系统(Intelligent Transportation System)的简称,是未来交通系统的发展方向,它是将先进的信息技术、数据通讯传输技术、电子传感技术、控制技术及计算机技术等有效地集成运用于整个地面交通管理系统而建立的一种在大范围内、全方位发挥作用的,实时、准确、高效的综合交通运输管理系统[1-2]。
DSRC 采用专为车间通信的WAVE 规范以及根据IEEE802.11 标准修改制定的IEEE 802. 11p 标准。 目前许多文献针对DSRC 所进行的研究主要集中在对通信协议或者交通系统某一项参数设置不同时所得出的通信系统实时性与延迟性的研究, 但是并没有针对整个ITS系统的架构角度来考虑对DSRC 通信系统的实现。
本文针对DSRC 在ITS 环境下的系统架构,提出了智能通信平台的整个设计, 对于DSRC 系统的通信软件架构的编写与实车试验,揭示了DSRC 在ITS 道路环境下架构设计流程与实车通信效果。
1 DSRC 通信平台系统架构设计与仿真
1.1 DSRC 系统架构之间的关系
DSRC 系统主要包括三个部分:车载单元(OBU)、路边单元(RSU)以及专用短程通信协议。 通过车载OBU 收发器与路侧RSU 收发器,可实现车辆与道路之间的信息交互。 DSRC 协议是在OSI 的基础上提出的三层协议结构,即物理层、数据链路层(LLC 与MAC 子层)、应用层,如图1 所示。
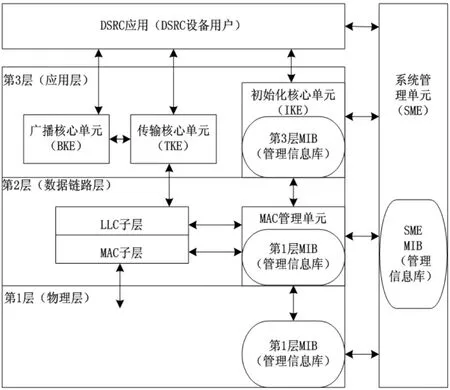
图1 调制方式系统架构的关系Fig.1 Relationship between the modulation and system architecture
1.2 智能交互系统平台通信socket 编写(物理层与数据链路层)
在统一车载单元OBU 与智能车载终端的接口的基础上, 明确车载单元OBU 与路边单元RSU 与智能车载智能终端信息交换内容的显示,根据不同的需求(例如车主得到推荐充电站排序,选择充电站;通过RSU 接收电网实时发送当前各区域的充放电能力、ITS 中心计算推荐的充电站、EV 发送剩余里程数、SOC、 速度等信息到ITS 中心)均可以采用VS2010 进行软件socket 开发[3]。
本文采用周立功CAN 卡来读取车辆CAN 信号, 通过VS2010 使用C++来编写通信平台MFC 文件与socket 通信程序。 要传递车载信息,首先要对CAN 卡的设置参数、如何获取设备信息、启动CAN 和复位CAN 和发送数据有一定的了解。 如图2 所示,接口函数库主要有:打开、关闭、初始化CAN、获取设备信息、获取错误信息、获取CAN 状态、设置缓冲区大小,收发数据等功能。
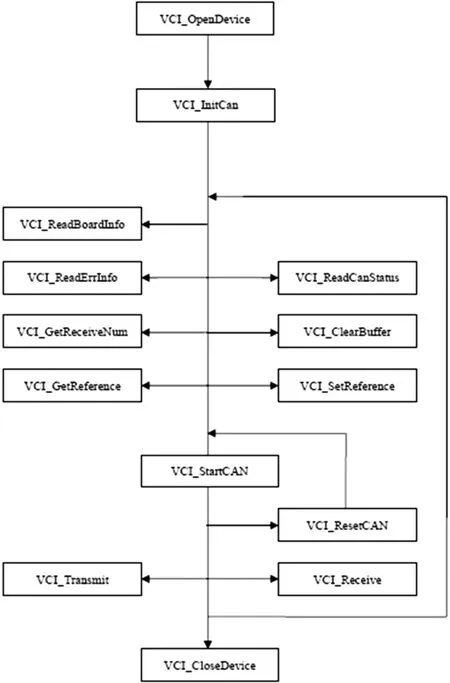
图2 CAN 卡接口库函数使用流程Fig.2 The use process of CAN card interface library functions
VCI_SetReferenc 和VCI_GetReference 这两个函数是用来针对各个不同设备的一些特定操作的。 比如CAN232 的更改波特率,设置报文滤波等等。函数中的PVOID 型参数pData 随不同设备的不同操作而具有不同的意义。
试验车CAN 信号可以正常根据我们的CAN DBC 文件中的协议接收显示数值,将CAN 卡接入CANoe 总线后能够成功获得并显示如方向盘转角以外的信号,信号稳定。未调试之前由于CAN 总线的频率为100Hz,为了使定时器获取信号频率高于CAN 总线发送频率,所以设置的频率较高,但是发现刷新过快,所以选择500ms 的刷新频率(此刷新频率为CANoe 信号)为目前的信号显示刷新频率。
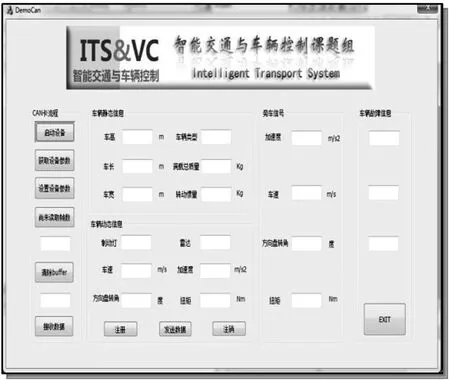
图3 发送与接收显示界面Fig.3 Sending and receiving display interface
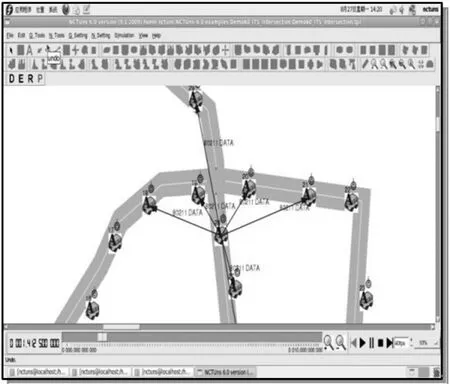
图4 NCTUNs 仿真建模Fig.4 NCTUNs simulation modeling
1.2 MFC 数据接发显示软件(应用层)
根据上述情况, 将通信所需的socket 程序编写为基于VS2010 的发送与接收显示界面,如图3 所示。
当CAN 卡连接上总线时,读取信号后在此界面显示,并且由于此界面具有socket 发送信号的功能,在显示自车的车辆动态与静态参数时,旁车也可以接收到本车的各类车身信号。
2 ITS 环境仿真模型搭建
参照之前的DSRC 物理层与数据链路层协议,使用6Mb/s 的传输速率,28dBm传输功率, 包大小分布范围400-500b,使用NCTUNs 自带的Car Agent 模型, 为车路相互通信,仿真时间设置为400s。 设定了2 种仿真道路环境:一个通用城市平面交叉口;一段快速路。 性能指标中的时延表示数据或分组从链路的一端传送到另一端所消耗的时间,包括了发送时延、传播时延、处理时延和排队时延;吞吐量表示在单位时间内通过信道的数据量如图4。
交叉口:双向2 车道,交叉口设计车速为40km/h(10m/s)。 信号周期为100s,2相位控制,黄灯时间为3s,红灯时间为45s(信号机使用NCTUns 自带的Signal 模型)。
快速路段:双向4 车道,长度为3km,车速限制范围为60-180km/h。
最先到达交通信号灯的车辆将数据包发送给周围车辆,仿真结果得出时延范围在100-120/ms,吞吐量变化在8-11kb/s,传输距离为1000m,基本满足美国交通运输部对车路协同的要求。
3 实车传输各类信号测试
经过上述软件编写与软件仿真等理论准备,建立实车通信实验平台。
实车调制实验分为以下几步:
3.1 车辆逆变器安装
将12V 蓄电池放入试验车,通过逆变器给车上所需220V 的DSRC 电源设备供电。
3.2 信号采集与发送的确认
实验地点在围绕车库的一整圈包括楼房屋遮挡的部分。 信号表现良好,在观测基站接收情况来讲延迟与显示刷新均处于接受范围内,通过周期发送方式能够正常将信息发给基站。
3.3 数据包的性能收发测试
在车库与楼房附近绕环圈行驶,定制5.8GHz 天线表现良好,在直线与可视距离上丢包率基本没有,行驶到建筑物之后由于衰减原因丢包开始有缓慢增加,甚至断过一次,不过很快又恢复通信,将基站天线位置放置在制高点应该能解决如上问题,并且使距离达到最大。
通信性能方面:在中间间隔到有三栋楼的时候才开始有短暂的数据丢包,其他时刻通信性能良好,使用ping 方式测得的round-trip 时间均低于3.4ms,2 组实验平均round-trip 时间为1.7ms,效果理想,如果是车辆安全相关的制动信号等信号的传输,可以满足要求。做数据传输实验时,观测方为基站, 在不进行限速的情况下,踏板踩到底时候的扭矩显示为448Nm,与实车性能相符如图5。
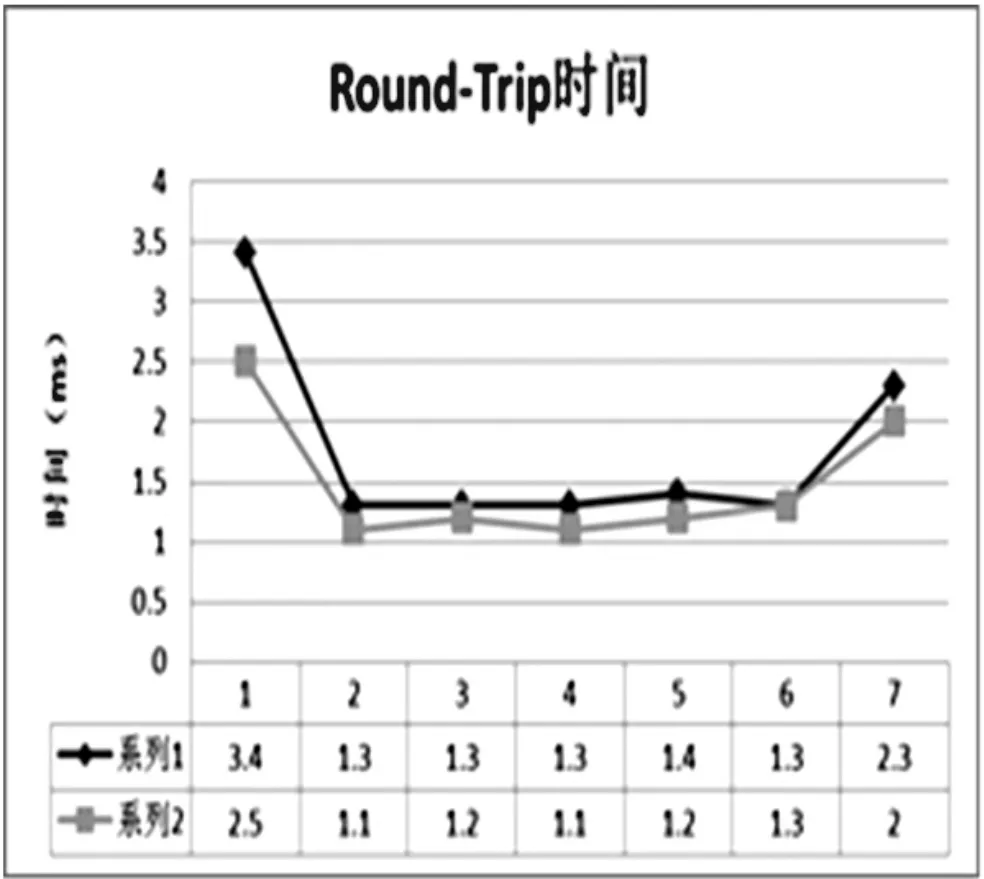
图5 实车环境数据包round-trip 时间Fig.5 The real vehicle environmental data packet round-trip time
4 结论
在DSRC 设备传输CAN 信号情况下的实际测试, 根据汽车研究所周围的道路环境下进行两车之间的通信, 车车之间能够顺利进行CAN 信号的传递,但是如果车间遇到有较大障碍物的情况(如楼房)下通信时,会有丢包产生,这与诸多因素有关,设备的发送功率,天线的增益等等,还有就是做实验的时候天线是放在车载内部,改进的方式有如下几点:
4.1 根据功率放大器将机器的功率提升到20dBm 以上;
4.2 将天线的接口方式改变为连接线,从而引至车辆顶端;
4.3 如果遇到衰减的情况,最好的方式是布置中继节点,利用多跳的方式来增加信号的可靠性;
4.4 如果是多车通信的情况下,尽量将无线接入点放置在中央位置,并且远离墙壁或者金属等能引起干扰的物体;
4.5 据推断,普通的无线电话信号不会对5.8GHZ 的Denso 信号产生干扰,于是考虑是否同时购入非全向的天线(周围的所有方向上天线都能够发射信号。 如果设备靠近外墙,无线信号的一半将被送到屋外,浪费了设备的大部分功率), 所以可以同时考虑高增益天线的实验结果(集中到一个方向发射,将两种天线搭配在DSRC 设备上使用)。
[1]Heinrich B, Edmund J R. Effectiveness of vehicle and roadside antenna locations for direct short range, vehicle to roadside communication [A]//3th Annual World Congress on Intelligent Transport System. Florida,1996:2 105.
[2]彭选荣,钟慧玲,徐建闽.专用短程通信(DSRC)协议研究及应用展望[J].移动通信,2003 年增刊.
[3]屠域,徐建闽,钟惠琳.DSRC 系统通信协议的开发计算机工程[J],2003,12,29(21).
