一种基于双目视觉的安全车距测量方法
2013-08-13岳亮
岳 亮
(重庆电子工程职业学院,重庆 401331)
责任编辑:任健男
车载终端既是汽车用户的智能终端设备,也是车辆监控管理系统的前端设备,一般安装在车辆的前端靠近方向盘的位置,车载终端设备通常由车载视频服务器、LCD触摸屏、外接摄像机、通话手柄、汽车防盗器等各种外接设备组成。车载终端作为车载标准配置常见于一些汽车,车载终端功能也根据不同需求略有不同,一般的车载终端包括导航仪、CD播放、收音机等。随着近年来视频技术的发展,视频终端得到市场的广泛认可,比如可视倒车,利用后视视频设备获取倒车图像,方便倒车;比如视频监测,远程监测车内情况。
智能交通成为近年来的研究热点,而汽车辅助驾驶作为智能交通系统车载终端部分,具有一定的研究价值,汽车辅助驾驶能够帮助司机更好地行车,提高行驶安全性,在智能交通系统概念中,安全辅助驾驶的内容不但很多,而且也很复杂。仅以保持车间距系统为例,这套系统需要配置车辆前方超声测距系统头端。比如,车辆偏移行驶线较远则给予警示,车距超过警戒距离则自动刹车等,这些在很大程度上降低了安全事故的发生概率[1]。
车载辅助驾驶离不开视频技术,尤其是计算机视觉,行驶线和车距的测量都需要该技术的支持。车距测量有多种技术可以实现雷达测距、激光测距、超声波测距、视觉测距。雷达测距分辨力好,但容易产生电磁干扰;激光测距对人类有安全隐患,且易受环境的影响;超声波测距范围较近且易受环境干扰,而视觉技术则很好地平衡了其他三种测量技术的测量准确度及环境抗干扰能力[2]。
现在车载摄像头已非常普遍,车载信息终端从摄像头安装在车外和车内两种情况考虑。辅助驾驶主要对最小安全车距预警进行了深入研究,有利于防撞安全预警系统的实用化和产品化,对于提高车辆的主动安全性,降低交通事故发生有重要作用。
1 车载终端视频功能解析
车载视频功能主要包括车内视频监控、辅助驾驶、倒车后视、视频娱乐等部分。主要模块图如图1所示,其中车内视频监控、辅助驾驶及倒车后视都与智能交通的发展有着一定的联系,车内视频监控更好地保证车内安全,监测司机的工作状态,而辅助驾驶则直接提高了车辆行驶的安全,可视倒车系统提高了车载终端的智能化水平,是智能交通发展的产物。
1.1 车内视频监控
远程车内视频远程监控在某些特定环境下是非常有必要的,特别是长途客车、公交车及校车,这些车辆乘载人员较多,有的行程较远,安全性有待提高。
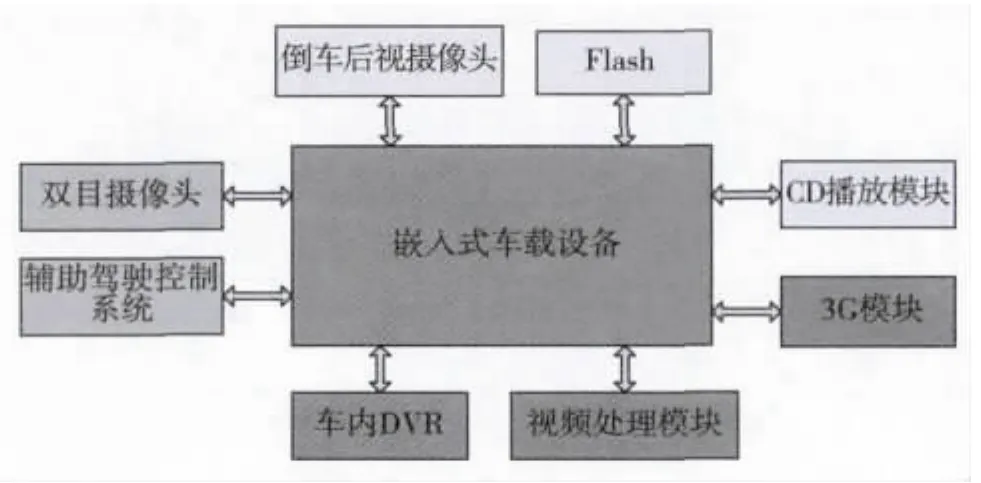
图1 车载视频模块结构图
车辆的视频监控平台,综合使用了GIS地理信息系统、GPS卫星定位系统、公共3G数据传输技术、视频压缩存储系统、数据库存储技术、流媒体分发技术,彻底解决了客运车辆管理的两大顽症——票务流失和影响行车安全的五超(超速、超员、超时驾驶、超线路、超范围)。蚂蚁线子系统可以直观地显示每条线路的车辆在该条路线的运行情况、线路两端的排班情况,例如小型的运管ERP系统,可以轻松地管理系统内全部车辆的生产经营。
无线视频车载监控在指挥调度城乡公共交通领域中得到广泛应用。无线视频监控指挥系统将发挥反应灵活的特点,通过无线实时视频将现场情况及时传回指挥中心,便于远程指挥和调度,极大地缩短反应时间,增强应急指挥能力。同时,由于3G视频的远程存储和智能图像截取功能,结合GPS的区域围栏功能、开门报警截取录像功能,可以清晰地记录客运车辆的乘车人员数量,解决困扰客运系统多年的票务流失问题。3G车载视频监控正是解决上述矛盾的最佳解决方案[3]。图2是中国联通为北京公交集团部分公交车开发配备的车载监控。
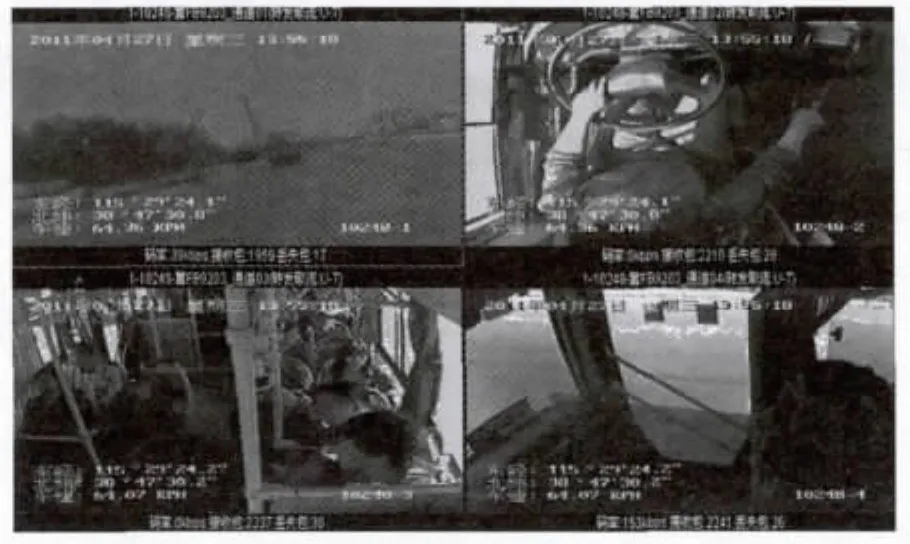
图2 公交车内及车外视频监控图
另外,疲劳驾驶是交通事故的一个很重要原因,特别是长途客车驾驶,通过在车辆内部前端安装摄像头,对驾驶员的眼球进行实时监测,清醒情况下,人的眼球是在快读转动的,如果在一段时间内,驾驶人的眼球处于静止状态,即可判断为疲劳驾驶,可以发出警示,这是基于计算机视觉的车载视频监控高级应用[4]。
1.2 辅助驾驶
辅助驾驶是计算机视觉技术、模式识别技术和自动控制技术高速发展的产物,通过模式识别技术与计算机视觉技术对车辆行驶环境进行识别判断,然后利用自动控制系统实现对车辆的控制[5]。
一般在车辆前端安装摄像头,对前进方向的图像采集处理,通过模式识别等算法,若在闹市行驶,判断前方物体,联合双目视觉测距,得到物体的距离;如果是在道路上行驶,可以判断是否偏离车道。图3是安全车距辅助驾驶的流程简图。

图3 安全车距控制流程简图
该头端对车载终端的输出参数为本车车头与前方物体的相对距离,信息车载终端内设安全标志位。车载终端内通过计算当前车速、前方车速与前方间距是否恰当,并可以简单地采用两个系数,以概括任意车速下的警戒距离和安全刹车距离。当计算警戒距离大于测距头端的输出时,该安全标志位被置有效,此时车载终端触发语音指令告警。当计算安全刹车距离大于测距头端的输出时,车载终端立即接管车辆刹车控制,直接启动车辆ABS刹车系统实施车辆紧急制动。
利用计算机视觉测距具有较高的精度,并且能够利用采集图像中的大量信息,实现车道状态识别、行驶车辆识别、交通信号标志识别等辅助驾驶功能。
1.3 可视倒车
通过在车辆后端安装摄像头,倒车时可实时看到车后景象,并通过图像算法实现倒车轨迹规划,避免不必要的相撞[6],如图4 所示。
在倒车视频上清晰看到车后环境,而且还有辅助白色虚线,用于司机操作方向盘时保证不触碰到左右车辆,方便快捷,特别适用于地下车库,在光线较暗且车辆停放密集的地方,采用可视倒车在很大程度上提高了倒车的便捷性。

图4 可视倒车系统界面图
1.4 视频娱乐
车载视频娱乐系统已成为整车差异化的一个关键点,大多数情况下作为车载设备标准配置而存在。大部分车辆的视频娱乐系统只限于本地视频服务,将存储的视频文件或者CD放入车载系统中,利用播放器播放资源,随着远程通信技术的发展,一些新的技术也不断运用到车载视频娱乐系统中,比如数字无线电广播、环绕音效、高清视频播放等,地铁数字电视和公交车载电视便是最好的例子,而基于普通家用车辆的远程视频播放还具有广阔的发展空间。
2 双目视觉安全测距系统设计
2.1 硬件选型
双目视觉测距系统硬件选择方面应考虑设备的运行环境,车载系统运行环境既要考虑到低功耗要求[7],又要考虑到电磁兼容问题,本系统选择2个1 000像素的模拟摄像头作为双目视觉视频采集设备,根据需求焊接电路板,具体硬件实物图如图5所示。

图5 双目摄像头硬件实物图
2.2 双目视觉测距原理
双目视觉测距利用光学原理及数学计算来实现,具体原理示意图如图3所示,将摄像机坐标系统和世界坐标系统重合,保证像平面与世界坐标系统的XY平面也是平行[8],2个镜头中心间的连线称为系统的基线B,镜头所得图如图6所示。

图6 双目成像示意图
由图6可得
由式(1)和式(2)消去x,则可得

可求得被测对象距离双目摄像机的距离Z为

式中:D=B+x1+x2。
假设摄像机误差为e,则

测距精度为

除此以外,还要考虑角度扫描成像,像素按镜头的方位角和仰角均匀分布
可借助镜头的方位角来表示物象的空间距离

若2个单目系统各自绕中心相向旋转,则空间距离Z可表示为

另外,因为

由式(12)、式(13)、式(14),消去λ和r后可求得距离Z,公式为

2.3 测量步骤
整个测量步骤如下:
1)安装放置双目摄像头于三脚架上,尽量保证三脚架置于水平面[9]。
2)调整焦距并进行标定,保证清晰度。
3)分别从左右摄像头拍摄两幅图像。拍摄的图像如图7所示。
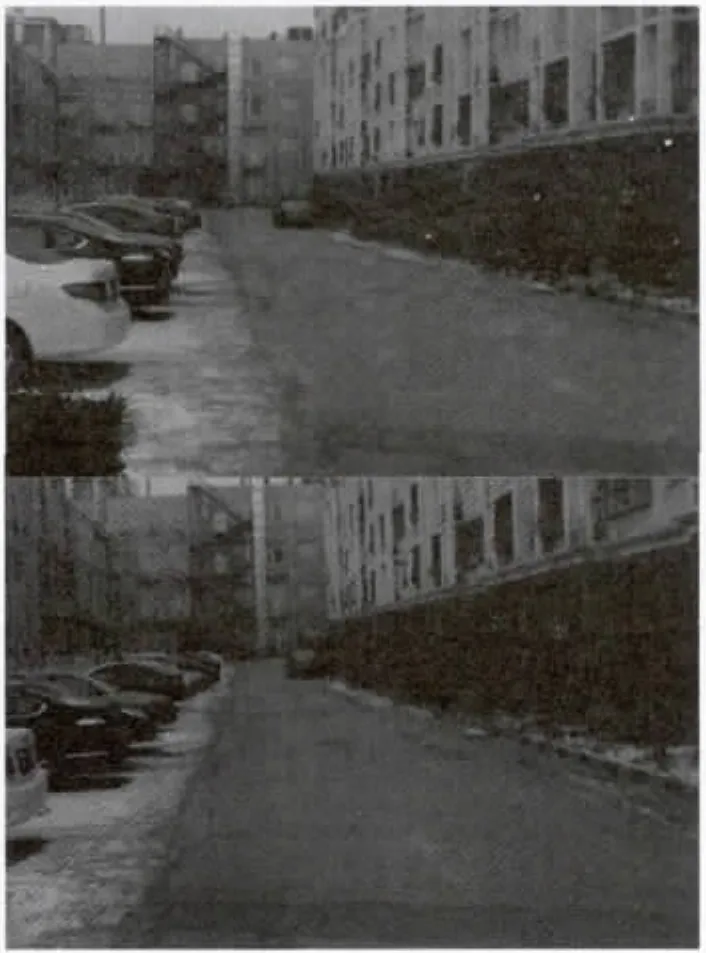
图7 双目摄像头左右视频图像
4)将采集的图像导入程序,定位车牌。
5)分别求出矩形车牌的中心点坐标(x1,y1)和(x2,y2),并代入公式求得车距。
2.4 结果分析
对图1所示的车辆在不同方向、不同角度、不同距离进行了距离测量,使用双目测距公式进行了试验,所得实验数据如表1所示。
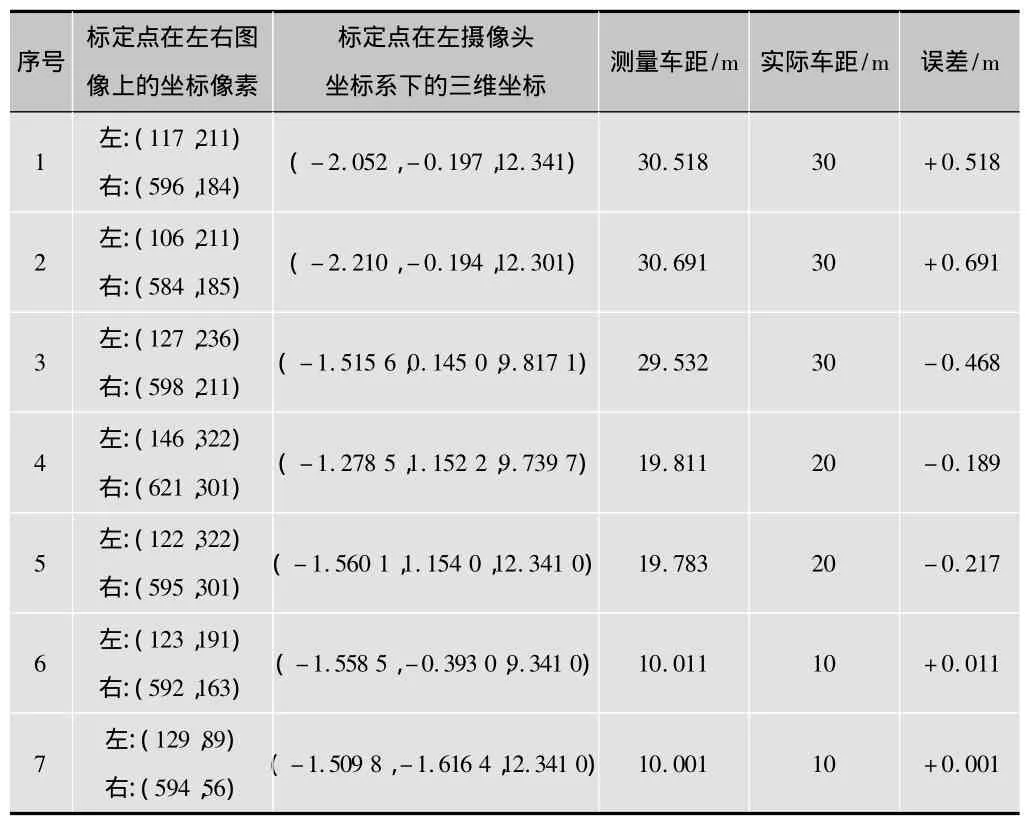
表1 车距测量结果图
从表1可以看出,距离越小,测量误差也越小,距离变大,测量误差也随之变大。范围在10 m之内的测距效果比较好,可以满足车辆安全测距的要求。这种误差产生的原因是多方面的,一方面由于采用的双目摄像头是普通的模拟摄像头,精度不高;另外一方面,实验器材布置过程中,双目摄像头的安装及脚架放置的路面平整度也有误差,这也是引起测量误差的原因。
从试验结果可得,基于双目视觉的测距方法适合作为安全车距预警的方法,因为安全测距一般都在20 m以内,用该种方法测量距离20 m距离的误差在1%左右,完全满足测距要求。
3 结语
本文通过对车载终端视频功能进行研究分析,重点分析了视频技术在汽车辅助驾驶安全测距的运用,通过双目视觉测距方法完成了车距测量,经实验证明,使用该方法测距能够满足车辆安全距离的要求,相比雷达测距、超声波测距和激光测距,优势明显,而且在一定距离范围内能够达到高精度标准,具有一定的实用价值。
后续研究主要针对整个测距系统优化,提高测距精度,保证整个测距系统的稳定性,以及借助双目视觉技术应用于车道状态识别和交通信号识别,丰富安全驾驶功能。
[1]XIE Yonggang,WANG Zhongmin,SU Shitao.The research of binocular ranging system on independent mobile robot[J].Advanced Materials Research,Material Science and Engineering Technology,2012,46(2):603-608.
[2]HOU Alin,GENG Ying,CUI Xue,et al.The implementation of distance measurement using binocular vision[EB/OL].[2013-02-20].http://www.scientific.net/AMR.490-495.711.
[3]陈威兵,刘光灿,冯璐.基于3G网络的车辆定位与视频监控系统设计[J].计算机测量与控制,2011(3):600-603.
[4]程如中,赵勇,戴勇,等.基于Adaboost方法的车载嵌入式疲劳驾驶预警系统[J].北京大学学报:自然科学版,2012(5):719-726.
[5]周欣,黄席樾,樊友平,等.汽车智能辅助驾驶系统中的单目视觉导航技术[J].机器人,2003,25(4):289-296.
[6]黄丽萍,和军平,倪龙,等.汽车可视倒车雷达预警系统的设计与实现[J].计算机测量与控制,2011(1):150-153.
[7]ZHANG Xiaolin,ZHANG Baofeng,LIN Yuchi.Study on attitude of dynamic object based on binocular vision system[C]//Proc.International Conference on Computer Application and System Modeling(ICCASM).Taiyuan:[s.n.],2010:4674-4677.
[8]ZHU Kun,YANG Tang,WEN Ruan,et al.Real-time tracking and measuring of moving objects based on binocular vision[J].Robot,2009,31(4):327-334.
[9]徐杰,陈一民,史志龙.双目视觉变焦测距技术[J].上海大学学报,2009(2):169-175.
