基于单片机的信标机系统设计
2013-08-13吴志宏翟成瑞王红亮
吴志宏,翟成瑞,王红亮
(中北大学a.电子测试技术国家重点实验室;b.仪器科学与动态测试教育部重点实验室,山西 太原 030051)
责任编辑:魏雨博
信标机是一种能够向外界传送特定标识信号的仪器设备。信标机的应用范围很广,在航空、航天、航海、交通车辆导航、气象、手持机、弹载设备、导航等领域有重要的应用。比如:1)在航天领域,可用该设备搜索黑匣子;2)在深水潜标领域,由于系统结构复杂,在布放海域海况恶劣时,回收操作比较困难,其中,潜标浮上水面后的定位是整个回收作业中的重要一环[1],一般情况下需要借助信标机进行定位;3)在箭载数据存储器领域,可用该设备搜索数据存储器。存储器记录了火箭在发射阶段的许多参数,试验后需要对存储器进行回收进而对数据进行分析,但是在实验过程中,存储器的回收难度较大,原因是残骸落区范围比较广,地形也比较复杂,而且大部分落区都在人烟罕至的地区,目前主要是采用人工的方法寻找存储器落点。使用信标机可以准确定位存储器的落点,从而极大地降低回收难度。由此可见,信标机的研究有很重要的意义。
目前我国信标机定位精度并不高[2],各方面的性能还需要进一步的提高和完善。如果无法精确获取目标物的位置,就会给回收工作带来很大困扰,所以设计高效率和高精度发射GPS位置信号功能的信标机在科研方面具有很大的实用价值和应用前景。
1 系统简介
本信标机系统由信标机主机和接收端两大部分构成。其中,信标机主机包含GPS模块、单片机、RF无线发送模块;接收端主要包括GPS模块、单片机、RF无线传输模块、FT245和计算机。信标机主机和接收端总体的设计框图如图1、图2所示。
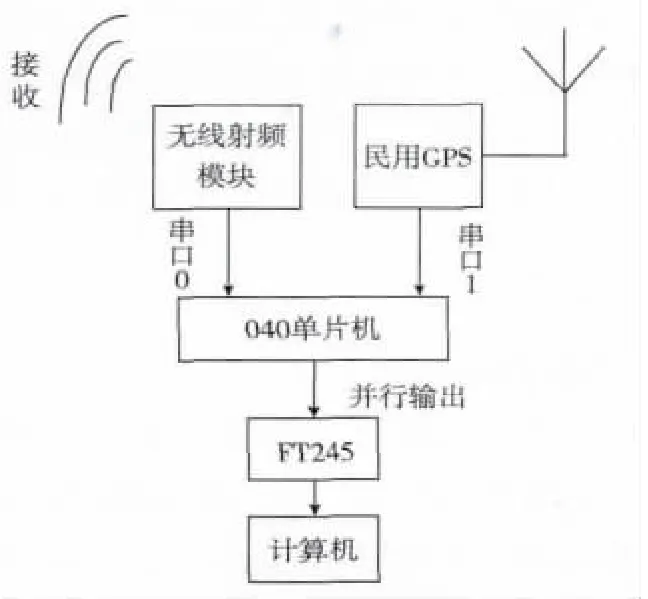
图2 GPS信标机接收端的组成框图
2 系统设计
2.1 GPS 模块[3-5]
在信标机系统中,导航系统的可靠性与精确性起到了越来越关键的作用。为了达到定位更精确的目的,本文在主机部分采用了2个GPS模块,一个是北京东方联星公司的CNS50-009卫星导航接收板,模块定位精度水平5 m,垂直10 m,速度精度为0.2 m/s,不受高度速度的限制,标准工作电压为5 V,接收板实现了射频、基带、导航结算一体化软件/硬件设计,具有高动态、高可靠性、体积小、工作稳定的特点。其波特率为115 200 bit/s,该模块受到启动命令才会工作,定位数据输出格式为NMEA0183。定位数据输出语句以0114EB3A开头,共有66个有效字节;另一个是采用瑞士U-BLOX公司的第六代GPS处理芯片MAX-6Q,此模块的定位精度水平位置为2.5 m,垂直定位精度为10 m,但是受50 000 m高度和500 m/s速度的限制,标准工作电压为3.3 V,波特率为9 600 bit/s,工作频率可通过公司自带的配置软件根据用户的需求进行选择,该模块不用发启动命令。定位数据输出语句以0114EB3A开头,共有66个有效字节。为了提高GPS和无线通信的抗遮挡能力选用质量轻巧的专用微带天线。
2.2 微处理器模块
本设计单片机型号为C8051F040,工作电压为5 V,可以直接接收GPS模块发送的数据。单片机接收到GPS的定位数据并处理后,发送给无线射频模块。由于单片机只有两个串口,而与单片机串口通信的器件针对仅有的两个串口很明显不够。所以本文使用100个管脚的XCR3128芯片实现虚拟串口作用,弥补了单片机串口不够的缺陷。而且把所有与单片有关的器件都连到了XCR3128芯片上。为了防止同时开两中断导致嵌套的问题,本设计采用轮询方式接收定位信息。单片机进行接收、挑选、处理信息之后通过USB芯片FT245实现与上位机的通信。地面接收端可根据实际情况的要求实现点对点的单机通信、点对多点的多机通信。
2.3 无线射频模块
无线射频模块型号为MaxStream公司的XTendTM900,该模块的工作频段为902~928 MHz,TTL电平输入,发射功率1 W,供电电压范围是2.8~5.5 V。它具有先进的安全性能,采用256 bit加密,可以组建对等传输、点对点传输核电对多点传输网络,发射频率采用FHSS(调频扩频)技术,调制方式为FSK(频移键控),最多10个信道可选,每一个信道包含不同的网络地址。此模块具有较长的传输距离,当输出功率为1 W,输出波特率为9 600 bit/s时,使用偶极子天线,直线视距传输距离最高为11 km,如果使用的是高增益天线其传输距离可达32 km,本设计采用的是高增益天线。该模块自带配置软件,用户可根据需求通过配置软件使该模块产生相应性能指标。Shutdown引脚能够使模块进入sleep模式,当不使用该模块时可达到低功耗要求。
2.4 电源模块
由于GPS信标机的电流须达到1.4 A左右,该系统在连续工作的情况下,需要提供比较大的功率,因此选择MILI公司5 000 mA的移动电源,在满电压时通常能达到9~12 V,输出电流最大为1.5 A。电源标称功率18.5 W,采用两块电源可以满足系统4 h的工作需求。单片机的标准工作电压为5 V,在2.7~3.6 V电压范围内可以正常工作。无线射频模块正常工作电压范围为2.8~5.5 V,本设计中用5 V供电。采用新雷能公司的DC-DC稳压芯片C543DK15-24S5W可以把电源电压稳定到5 V,为单片机与射频模块供电。由于各个器件的正常工作电压不同,所以需要进行电压转换才能使各个器件正常工作。本设计采用PT5401电源模块把电压从5 V转换为3.3 V,为相应器件供电。电源电路图如图3、图4所示。
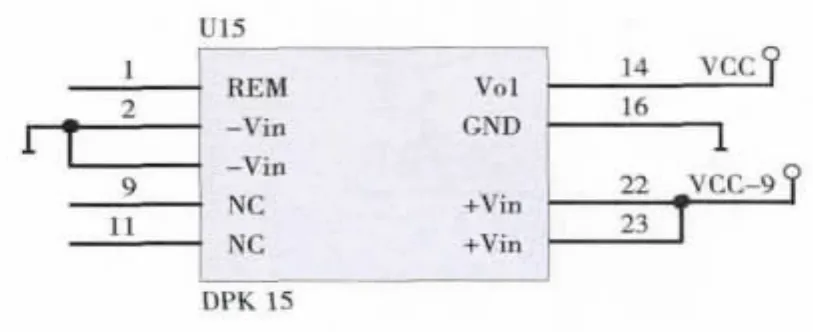
图3 5 V稳压电源模块电路图
2.5 软件实现
本定位系统提取的主要是目标的经纬度、高度及时间信息,因而需要通过单片机对GPS发回来的全部数据进行筛选处理,提取有用信息,将不需要的信息全部去掉,同时也减少了数据传输量,提高了数据的实时性,降低了功耗。
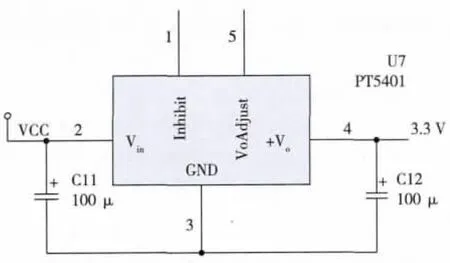
图4 5 V转3.3 V电路图
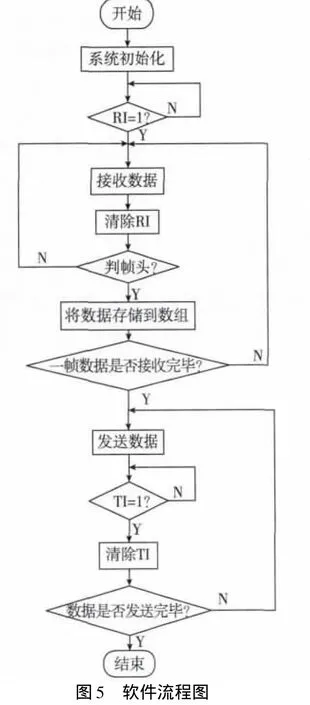
本设计中,单片机数据接收采用轮询的方式,软件流程图如图5所示,首先单片机完成系统初始化,然后查询串口1接收中断标志位RI,若RI为1,清除中断标志位RI,并开始读取接收到的GPS数据,若检测到接收到的数据的帧头为“MYMGPRMC”,则将其存储到数组里面,然后继续接收,直到接收完规定的67个字节为止。否则,将数据丢弃。按照相同的方式,查询、接收、存储串口2所接收到的另一路GPS发送的数据,直到全部接收要求的字节数。数据的发送是在接收空闲时候进行的,采用存储器段选的方式,使得数据的存储和发送在不同的存储段分别进行,避免了数据的混乱。
接收端接收到数据,并将其传给上位机显示。为了方便上位机识别与处理信息,需要对发送的字符串前自定义一个帧头,本文规定东方联星GPS信息在数据前加一个头“EA”,MAX-6Q发送的GPS信息前加“EB”。
3 仿真结果
3.1 处理后的GPS数据
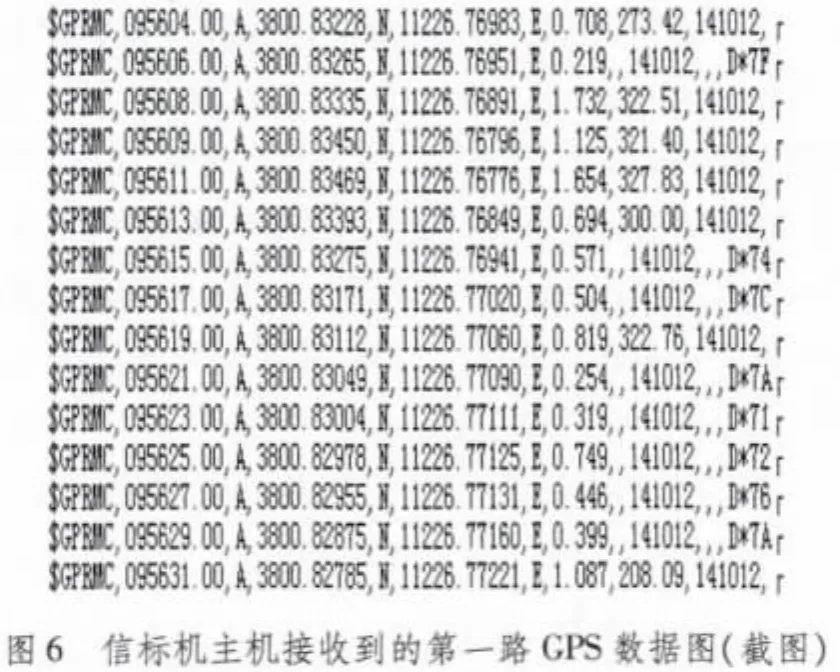
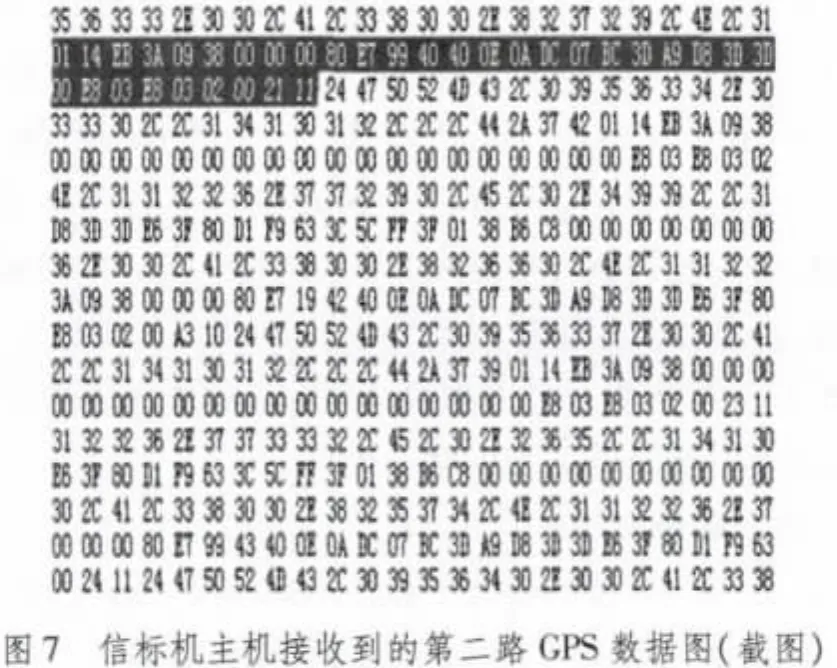
对于信标机主机而言,主要负责接收2路GPS数据,并将其通过无线射频模块发送。通过串口调试助手,可以显示主机接收到的2路GPS数据,其中“MYMGPRMC”为接收到的一路GPS数据帧头,如图6所示;“0114EB3A”为接收到的另一路GPS数据帧头,如图7所示。该数据表明,单片机正确接收了2路GPS数据,无丢数现象,完全符合设计的要求。
3.2 上位机演示结果图
上位机演示结果如图8所示,通过2路GPS模块进行定位,达到高精度定位的要求,同时也会防止因某些原因导致其中一路定位系统失灵,从而达到了安全可靠的目的。本设计还采用了重复发数据的方法,目的是在GPS不发数据时避免了地面接收机无数据显示的情况,这样就会提高该信标机的定位精度。
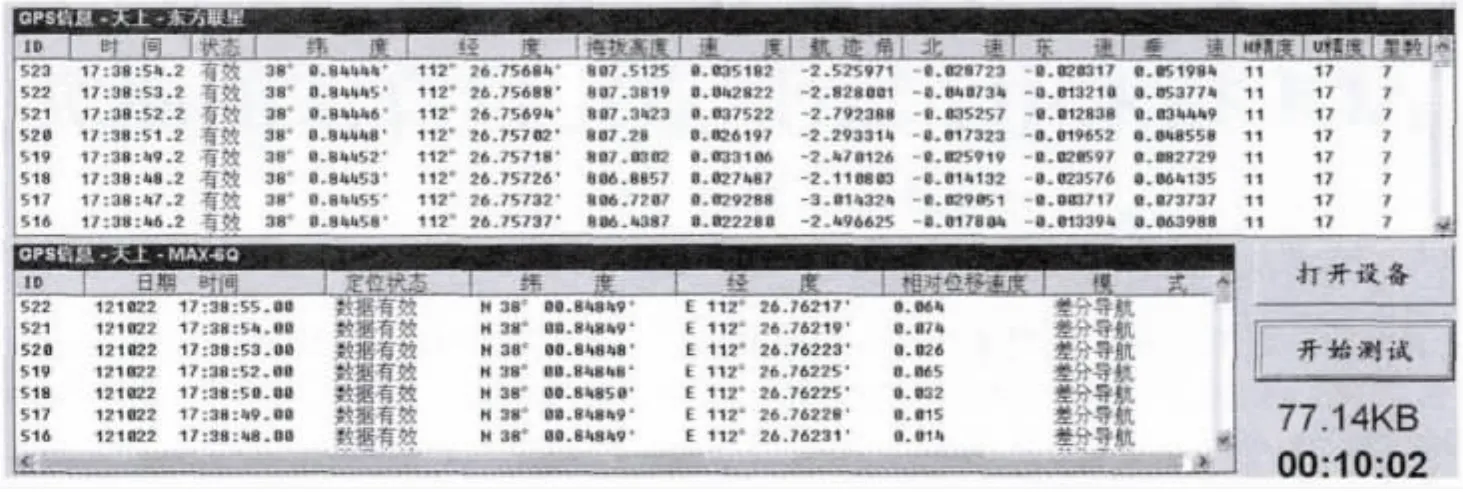
图8 信标机主机接收到的第二路GPS数据图(截图)
4 结语
本文设计了一种基于单片机的无线定位信标机系统,该系统有效地实现了对GPS信息的接收,传输以及分析处理。通过中断查询方式,单片机完成了对2路GPS信息的接收,并将数据传输给无线射频模块发送。为了进一步提高GPS定位信息的可靠性、稳定性与实时性,在单片机空闲时,将已发送的数据重新发送。接收端接收GPS数据,并通过上位机显示。实验证明,采用GPS模块与无线射频传输模块相结合的定位系统可以实现快速准确地定位,系统操作界面美观灵活,自动化与智能化程度高,可靠性和稳定性强,通用性和移植性好,完全达到了预期效果。
[1]王海员,于卫东.一种海洋潜标适用的新型GPS信标机[J].海岸工程,2011(30):66-73.
[2]李锐,赵来定.基于FPGA的L波段卫星数字信标机[J].南京邮电大学学报,2012(32):24-27.
[3]李雯琦,吴虹,张南,等.地面数字电视信号与GPS相结合的定位系统[J].电视技术,2010,34(6):11-16.
[4]陈孟元,凌有铸,王冠凌.北斗卫星导航系统与GPS互备的广播电视授时单元[J].电视技术,2010,34(6):60-63.
[5]吴德伟.航空无线电导航系统[M].北京:电子工业出版社,2010.
