船舶导航系统网络通信关键技术研究*
2013-08-10孟士超唐正茂
孟士超 唐正茂
(1.海军驻431厂军代表室 葫芦岛 125004)(2.武汉第二船舶设计研究院 武汉 430064)
1 引言
随着海军舰船技术的不断发展,各舰船装备进行着大规模的改进和创新,以提高舰船的战斗力。舰船导航系统作为舰船的千里眼和顺风耳,不仅要求提供准确的船位信息,而且要求与武器装备、测量系统相结合,提供武器发射的精确位置和落点测量等各种数据,是舰船航行和作战的重要保证[1~3]。因此,导航系统内部和各系统间信息传输技术的改进是整个系统升级中的重要一环。
当前的综合导航系统是一个结合不同特点的导航设备和导航方法的复杂系统,是利用计算机技术对多种导航信息进行综合处理,来提高系统性能的导航系统,其涉及到各导航信息源许多设备的相关技术、计算机技术、显示技术、控制系统、通讯系统和数据处理等理论[4~5]。为此,有必要对船舶导航系统的网络通信技术进行研究,以实现船舶导航系统的快速网络通信技术的发展。
2 传统的导航系统网络通信技术分析
在传统的舰船导航系统中,各导航设备间普遍采用EIARS-422A接口通讯标准,使用NMEA-0183码或二进制补码的形式进行通讯。RS-422A采用平衡输出的发送器,差分输入的接收器。在舰船通讯中采用全双工通讯,需要四根信号线,两根信号输出线,两根信号输入线。一般情况下,RS-422A线路不使用公共地线,这使得通讯双方由于地电位不同而对通讯线路产生的干扰减至最小。采用普通双绞线时,RS-422A可在1200m范围内以38.4Kbit/s的波特率进行通讯。在短距离(200m范围内),RS-422A的线路可以轻易达到200Kbit/s以上的波特率[6]。因此这种接口电路被广泛地应用在舰船导航系统中。
虽然使用传统的串行口(RS-422A)进行通讯,具有连接形式简单、通讯距离远、信息传输可靠等优点。但是,由于串行通讯是逐位进行传送的,故传输速度较慢;并且,它采用的是点对点的连接方式,当各导航设备间的连接关系复杂时,设备间的走线也就变得更为复杂。目前,随着舰船信息化程度的提高,各设备、各系统间的信息通讯越来越频繁,信息量越来越大,使用传统单一的串行口进行通讯己经不能满足导航系统发展的要求。
3 现代导航系统网络通信系统研究
3.1 通信网络方案的确定
使用RS-422A标准的通讯接口连线形式简单,通讯距离相对较远,适合那些位置、信息相对独立的设备;而使用CAN总线可以比较方便地实现点对点、一点对多点,以及全局广播等多种传输方式,它所提供的非破坏性的总线仲裁方式,有效地解决了多节点同时发送报文时各报文相互冲突的问题,保障了CAN总线网络上信息传递的可靠性[7~8]。CAN总线网络属于底层控制网络,程序可操作性强;另一方面,加上目前流行的以太网技术,提出一种集串口、CAN总线和以太网技术于一体的信息传输网络,来解决单一传输方式带来的缺陷。同时,网络组建还要考虑导航设备位置对建立通讯网络的影响[9]。由于上述三种通讯技术己经相当成熟,所以组建的自由度很大,可以根据不同的船舶,不同的设备类型以及不同的协议要求对网络进行适当的组建。
3.2 通信网络的体系结构设计

图1 船舶导航系统通信网络体系结构图
由于传统单一的通讯方式存在着缺陷,又因为串口、CAN总线和以太网相结合的方式能方便有效地弥补上述的不足[3],因此确定了这种多元化的通讯方案。如图1所示,是现代船舶导航系统通信网络体系结构图。的部分。CAN控制器就是扮演这个角色,CAN控制器是以一块可编程芯片上逻辑电路的组合来完成实现这些功能,对外提供了与微处理器物理线路的接口。如图3所示,接口电路主要由四部分组成[10]:控制器AT89C52、CAN控制器SJA1000、CAN总线驱动器82C250和高速光电隔离6N137。微处理器负责SJA1000的初始化,通过控制SJA1000实现数据的接受和发送等任务。

图2 导航系统网络通信结构组成示意图
为了增强CAN节点的抗干扰能力,SJA1000的TXO和RXO并不是直接与82C250的TXD和RXD相连接而是通过高速光耦6N137与82C250相连,这样就很好地实现了总线上各CAN节点的电器隔离。

图3 CAN总线接口电路示意图
如图1所示,综导显控台与各导航设备之间的通讯方式发生了变化,在原来的多串口卡的基础上,还增加了CAN通讯卡来实现CAN总线的通讯,为了保证在局部故障或受损时,全系统不至于瘫痪失效,CAN总线导航信息通讯网络采用双环形冗余结构设计。但我们也不能完全废除串行口通讯,对某些信息相对独立的设备,也可以保留原有的RS-422A通讯。
3.3 系统组成
导航系统从串口到CAN网络的改进必须是整个导航系统同时进行的,各种导航设备和综合导航显控台的接口都必须从串口升级成CAN,从而能形成统一的CAN网络。在早些时间提出的方案中,提出先完成综导显控台的CAN网络化改造,而其他导航设备还是用原有的串口通讯,那么在与综合导航显控台的通讯中还必须加上中间一个环节,那就是实现串口和CAN的相互转换。这样的改造并不彻底:1)没有改变综导显控台与各导航设备之间连线相对复杂的问题。2)没有改变各导航系统之间信息不能互享的局面。3)由于加了CAN与RS-422A信号之间的转换模块,使综导显控台内的信号流程更加复杂,降低了系统的可靠性。4)不能为今后的改造带来方便。
综合考虑了上述情况,为了使舰船导航系统通讯可靠性得以提高,提出下面的网络系统结构示意图。具体如图2所示。
4 现代导航系统网络通信系统关键技术研究
4.1 CAN总线通信接口电路设计
在网络的层次结构中,数据链路层和物理层是保证通信质量至关重要、不可缺少的部分,也是网络协议中最复杂
4.2 以太网通信接口电路设计
为了实现采用以太网卡通信的导航设备能够将数据信息接入通信网络传输到综导台,需要为以太网卡设计通信接口电路。出于简化电路设计和降低成本的考虑,这里选用RTL8019AS以太网通信接口芯片,电路设计框图如图4所示。
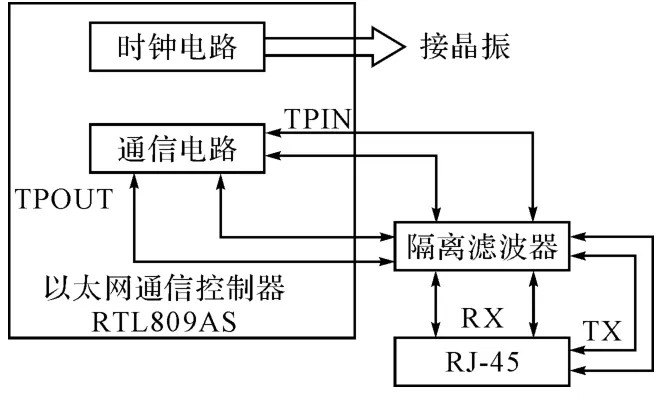
图4 以太网通信接口电路示意图
采用10BASE-T布线标准通过双绞线进行以太网通讯,而RTL8019AS内置10BASE-T收发器,所以网络接口电路比较简单,外接一个隔离滤波器,TPIN±为接收线,TPOUT±为发送线,经隔离后分别与RJ-45接口的RX±、TX±端相连。时钟电路通过Tl、T2接一个20MHz晶振以及两个电容,实现全双工通讯。
4.3 通信网络的可靠性设计
冗余是指系统或设备中具有多一种手段执行同一种规定功能的能力。设置冗余可提高系统的可靠性,但同时又增加了系统的复杂性、重量和体积。工程经验认为:采用成熟设计的冗余技术是实现高可靠性的有效途径。
在本论文中,为了提高整个网络系统的可靠性,采用了两套完全一样的总线拓扑结构,使用两台计算机(监控计算机A和监控计算机B)来监控两个网络(A路和B路)。它们的配置方式完全相同,都通过CAN接口与CAN网络A和CAN网络B相连,实时监测各导航设备和两条网络的工作状态。两台监控计算机之间使用以太网来进行通讯。CAN总线上各个节点的接口均采用冗余设计,即采用两个CAN控制器接口分别与两个总线相连。两路CAN总线结构互相冗余备份,当其中一路发生故障,节点设备可以通过另一路继续通讯,可以避免因某个CAN接口或线路发生故障对网络系统的影响。通过切换电路来显示正常工作的CAN总线网络上的信息。从而实现了网络的冗余设计。
5 结语
根据传统通讯技术的特点,分析其不足,提出了用CAN总线结合串口、以太网络代替传统的单一串口通讯技术,并对通讯网络的组建进行了设计说明,给出完成综合导航显控台网络通信硬件结构的设计方案,并完成了相关关键技术的设计,对于提高现代船舶导航系统网络通信技术水平具有一定的理论和实践指导意义。
[1]周永余,陈永冰,李文魁.舰船组合导航系统发展评述[J].中国惯性技术学报,2003(1):68-73.
[2]张刚,张德民,聂颖.基于GSM/CDMA网络的GPS船舶定位系统[J].重庆邮电学院学报,2005,17(1):65-67.
[3]孙枫,袁赣南,张晓红.组合导航系统[M].哈尔滨:哈尔滨工程大学出版社,1996:23-66.
[4]杨润奎,胡云安,范英飚,等.船舶组合导航技术探索与研究[J].海军航空工程学院学报,2009(1):47-51.
[5]袁克非.组合导航系统多源信息融合关键技术研究[D].哈尔滨:哈尔滨工程大学博士学位论文,2-13.
[6]王红宇,赵然,乔和.基于RTL8019AS单片机在网络数据传送中应用[J].辽宁工程技术大学学报(自然科学版),2003,24(9):37-39.
[7]史久根,张培仁.CAN现场总线系统设计技术[M].北京:国防工业出版社,2004:34-56.
[8]邬宽明.CAN总线原理和应用系统设计[M].北京:北京航空航天大学出版社,1996:73-102.
[9]王福友,郝燕玲,袁赣南,等.舰船导航系统CAN总线网络设计的关键技术[J].中国造船,2008(2):81-87.
[10]袁赣南,王福友,王佳佳.舰船导航系统CAN总线网络设计关键技术的研究[J].计算机测量与控制,2007(6):750-753.
