基于OpenGL三维地形构建技术研究
2013-08-06汪明
汪明
(重庆市勘测院,重庆 400020)
1 引言
在解决大规模地形数据三维可视化和实时绘制的问题中,国内外许多学者都进行了广泛、深入的研究,主要集中于地形和纹理数据的分页管理、纹理数据和地形数据的LOD控制、可见域的裁剪等多个方面。此外,随着图形处理器(Graphic Processing Unit,GPU)性能的提高,出现了基于硬件GPU的粗粒度的离散层次细节方法[1]。
本文拟研究基于OpenGL的大规模地形三维地形构建关键技术。由于高分辨率的DTM或DEM的数据集庞大,若直接使用原始数据进行可视化,则需要绘制的三角形或四边形将达到上百万个。因此,为了防止显示滞后,缓解内存和显卡缓存的压力,需要考虑以下几个方面:对复杂的地形做数据简化处理;三维地形数据LOD构建等。
2 三维地形构建技术算法及实现
本文基于多分辨率高程数据文件的层次细节构建地形,主要思想是对大范围的DEM数据先做预处理,即裁剪分层(见3.1)。由于文件按行列组织,因此某一块的索引则为i*m+j(i为行号,j为列号,m为列数)。我们只读取和显示在可视范围内的文件块,这解决了把DEM数据全部读入内存而实际只需要显示地形中很小一部分的矛盾。
2.1 高程数据组织方法
本文中三维地形的构建,将采用多层次文件的形式存储与读取数据,而Esri的GIRD数据却在保存上稍显复杂,为了简化存储与后期处理的方便,将采用自定义文件存储方法,对数据进行多层次组织与保存。
如图1所示,A为低层级数据L,它所存储的当前层级下的数据相对于高层级下的数据B(级别L-1)来说,其存储范围为2×2个B层级数据,但是A的分辨率只有B的1/4。A和B均为所在层级下的一个文件,而DEM数据由很多个这样的文件组成,而且不管是同一层级还是不同层级,每个文件的大小一样(除去边缘上不足块文件栅格数的文件)。本文采用每块文件栅格数为长宽均为256,文件大小为“长×宽×浮点数长度”,浮点数为4个字节,即文件存储大小为256×256×4=262144Byte=256kb。所分层级总数是按照如下公式计算得出:

每一层级(level)文件中相对于源文件重采样点的间隔数XYDiff为:


图1 分级数据示意图
在保存文件时,采用每一层级存放在单独文件夹下面,每一层级文件夹下有多个文件块,分别代表当前级别下256×256个栅格的数据。如图1中A和B中的红色框。每块数据以二进制格式写入文件,后缀名为.bk,文件命名方式为:“当前级别_所在行号_所在列号.bk”,如图1中A级别为L,并在i行j列,因此在级别为L的文件夹下,有文件名为L_i_j.bk。在L同级文件夹中包含一个cfg.cfg的二进制文件,其中包含了DEM的头文件信息,结构体如下:

如果要对所构建的地形进行补缝,则需要在生成数据时在每个块文件中插入相邻的最后一行(列)的数据,即数据需要有重叠部分,如图2中D包含了B有重叠行,而和C有重叠列。

图2 补缝数据分块示意图
2.2 数据裁剪及重采样
数据的裁剪程序使用了GDAL函数库中的重采样方法:


该函数中,nXOff、nYOff表示读取栅格的起始行列;nBufXSize、nBufYSize表示读取栅格的行列数。
通过设定这4个参数,可以实现栅格数据的剪裁和重采样。
2.3 三维地形构建算法
(1)分块分级的地形构建算法
在地形数据分级存储的基础上,确定观察点与观察目标点后,可以根据视点(Object)到观察(Target)点的距离计算出当前读入数据所需要的文件级别以及当前的视域。为保证三维地形显示与DEM大小无关,规定显示的地形最多只能是观察点及其周围8个文件块。这样当读入文件都在同一级别时,读入内存的数据最多为256×9 kb,从而在内存方面保证了实现海量数据的实时快速地形构建的可行性。
在地形显示时,为保证地形显示的效果,读取文件时,不一定只读取一个级别的文件,而更多的是通过四叉树与级别判定公式读取当前显示块、当前显示级别下的文件。如图3中,设L(i,j)为观察点块文件,而周围三个块文件则是经过一定计算会显示的文件块。

图3 地形构建实时分级
首先计算出视点到L(i,j)的空间距离Lij,然后转换成栅格个数RLij,通过公式(3)计算得到当前块的级别(其中blockSize为分块文件的栅格数)。把L(i,j)分为相同的4块,以相同的计算方法计算L(i,j)4块到视点的距离,并计算层级,如果有一个层级比L(i,j)中心点的级别更高,就需要读取更高级别的文件数据,如图3中L(i,j)继续分级后的文件块为图4所示。图5为某一次绘制时,读入的不同级别的文件块。


图4 各级数据文件示意图

图5 视图中的地形数据
为了保存每个文件块(block)文件的数据,我们设计了如下结构体:

该数据结构中,iX、iY分别表示当前块在当前级别(iLevel)下的列、行号;fData表示保存在内存中的文件块中的高层数据;pBlocks表示文件块划分的内存子块,这些子块将通过自绘完成地形的可视化;Width、Height表示内存中pBlocks所包含的内存子块的列、行数。
当需要获得某点高程数据时,只需要知道当前点P在总的DEM栅格中的行列号(x,y),将行列号减去当前文件块的起始行列号(ox,oy),可得到P在当前文件夹中的行列号(m,n)∶(m,n)=(x-ox,y-oy),再由n*Width为索引得到栅格点的值。
(2)块级别评价函数
(3)式定义了数据分块级别判定函数,RLij表示视点到当前文件块或内存子块中心点的栅格个数,中心点的高程值取整个DEM的平均值,且level均为整数。我们定义最精细的层级为1,视点距离目标点的栅格数小于文件分块的栅格数的两倍。(3)式中log2(RLij)求取RLij的对数,-6表示-7+1,即为-log2(BlockSize)+1,文中的BlockSize为文件子块所划分的栅格数,即256。因此,判别公式实际上是(4)式。

(5)式表示一般的视距栅格数求取方法,由公式可以看出相对于当前文件来说的栅格视距RL只与层级level与采样间隔数XYDiff相关,在裁剪数据生成后BlcokSize为常数。由于当前视图读取的文件层级为level,并且当前文件中采样间隔数XYDiff由level确定(2)式,因此可确定RL只与BlockSize相关,且为一常数(6)式。

由于RL为一个常数BlockSize,就可以通过目标点坐标与RL计算出当前级别下视域范围(当前文件级别下的栅格矩形),就可以在计算出目标点所在的文件块后(图6中文件块5),根据RL就可以判定,只需要再读入文件块5周围的8个文件块,就可以覆盖整个视域,达到只读取和构建视域范围内地形的目的。
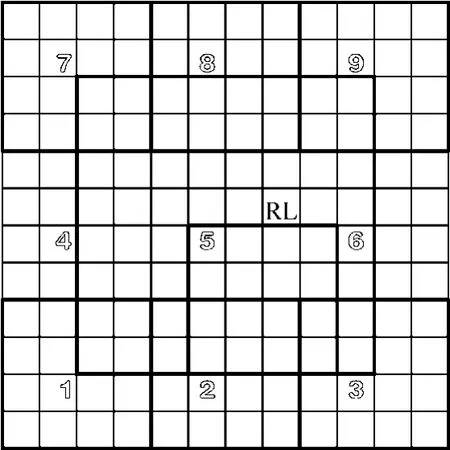
图6 视域中的文件块
(3)四叉树分块过程

3 算法性能分析与讨论
3.1 数据分块分析
测试中所用GRID数据为列12020,行12618,栅格大小 22.5 ×22.5,计算面积为 76782.10725 km2,文件大小578.57 MB,文件裁剪耗时5 min。文件裁剪后分为7个级别的数据,即包含7个文件夹,共3166个文件,总的数据大小为771 Mb,占用空间774 Mb。数据大小增加了33.25%。第一级别的数据大小为578 Mb,占用空间580 Mb,每降低一个级别,数据大小为上一级的四分之一。
3.2 三维地形显示性能分析
在内存消耗方面,相对于把所有的地形数据读入内存中,本文中提出的算法只读入少量数据,仅仅是读取有限的数十个文件块。可以对算法中数据读入大小做一定假设,每次读入的数据最多不超过40个小文件块,即不超过10 Mb。总的来说,读入内存的数据趋于常数,不会因为地形数据变大而变大。
在实时构建的地形中,同一时间所显示的顶点数在256×256=65536到256×256×40=2621400之间。在具体实际中也可以将分开的栅格数降为128,可以减少场景中绘制的顶点数。在实时显示时,场景动画的帧频为十帧以上。场景中绘制顶点数,与读入的地形数据相关,会在一定范围内变动。
3.3 地形缝隙修补
由于在地形构建中有不同级别的数据显示,在不同级别数据的临边上,细节较丰富的块上必定多出部分点,如图7中的两个圆圈。圆圈处不能保证左右两边的面在同一个面上,因此就需要对这些点和面做单独处理。

图7 地形缝隙示意图
对于这种处于边缘,并且相邻子块处于不同级别的子块来说,需要用三角形绘制出采样间隔造成的不重合的点,如图8。但是这种情况只有在相邻级别不超过1的情况下才能满足条件,因此,需要在前期判断和处理,使相邻级别不超过1。

图8 地形补缝原理示意图
在每个64×64的子块自绘时,进行对当前块与其下部块与左边块进行补缝,那就需要知道每个子块的级别以及子块所在的文件块,以便读取高程数据。我们把要显示的文件块用链表存储,并为存储在文件子块结构体中的子块提供相关的信息,比如,子块所在文件在链表中的索引,再通过索引获取结构体中的信息,这样就可以获得所需要的信息。
4 结论
本文提出的基于多级别栅格数据的多层次LOD划分方法,对原有DEM数据文件做层级划分与重采样,生成具有层次和不同分辨率的小文件块。在三维地形实时构建时,计算出视图中要显示的文件与级别,实现了部分地形数据的读取,使内存占用大大减少。在显示时,对内存中数据进一步做LOD分级,让显示的面片更少。
与已有的三维地形构建方法相比,本文中算法实时,由于只对每个块进行层级判别,因此可视化过程中的计算量少,可视化过程中几乎不受计算过程的影响,级别判断时间大概为0.0083 s左右;而且相对于其他算法把全部数据读入内存,本文算法在显示中只需读取可视范围内的DEM数据与影像数据,在可视化过程中占用很少的内存,大概在3Mb~10 Mb之间。在这种算法基础上,基于格网表达的DEM模型数据管理简单易于实现交互操作。
由于在内存使用及计算量方面减少,本文提出的算法总的来说达到了预期目标,提出了一种新的三维地形构建方案,并优化了现有的三维地形在某些方面的不足。
[1]吕希奎,周小平.实战OpenGL三维可视化系统开发与源码精解[M].北京:电子工业出版社,2009:125-239.
[2]孙敏,薛勇,马蔼乃.基于格网划分的大数据集DEM三维可视化[J].计算机辅助设计与图形学学报.2002,14(6):566-580.
[3]罗景馨,唐琎.基于改进四叉树分割和结点存储的LOD算法[J].计算机工程.2009,35(20):202 -204.
[4]徐文学,江涛,姚兵.基于OpenGL的DEM三维仿真方法研究[J].国土资源信息化.2008(1):7-11.
[5]黄超超,凌永顺,吕相银.ROAM动态地形渲染算法研究[J].计算机仿真,2005,22(1):216 -219.
[6]周宏伟,杨平,陈琦.实时地形可视化ROAM算法的分块改进[J].测绘通报,2003,(8):61 -63.
[7]江流长.ROAM地形渲染算法的实现[J].农业网络信息,2006,(5):42 -44.
[8]涂超.ROAM算法原理及其应用研究[J].辽宁工程技术大学学报,2003,22(2):176 -179.
[9]解志刚,马秋禾,赵金萍.基于二叉树结构的地形分块实时漫游的研究[J].海洋测绘,2004,24(5):35-38.
[10]刘修国,张剑波.基于DEM库的地表模型实时简化方法[J].小型微型计算机系统,2004,25(2):280 -282.
[11]http://www.gdal.org[OL]
