六极异极性径向永磁偏置磁悬浮轴承的研究
2013-07-25徐龙祥金超武
纪 历 徐龙祥 金超武
南京航空航天大学,南京,210016
0 引言
永磁偏置的磁悬浮轴承利用永磁体产生的磁场代替主动磁悬浮轴承中偏置电流产生的磁场,具有功耗低、体积小、效率高等优点,在储能飞轮、风力发电、涡轮分子泵、高速鼓风机以及压缩机等众多工业场合有广阔的应用前景[1-4]。
当前国内外在径向两自由度的永磁偏置磁悬浮轴承方面的研究大致可以分为两大类:同极性和异极性永磁偏置磁悬浮轴承[5]。其中,同极性永磁偏置磁悬浮轴承是结构最为常见的永磁偏置磁悬浮轴承,它控制简单,且能够减小转子的磁滞损耗[6-7],目前在工业上得到了广泛的应用。但是,该类型的磁悬浮轴承轴向长度较长,影响转子临界转速的提高,且永磁磁通从轴向通过定子、转子叠片,磁路漏磁系数大[8]。相对而言,异极性永磁偏置磁悬浮轴承既有主动磁悬浮轴承漏磁较小的优点,又有永磁偏置功耗较低的优点,且无需增大转子的轴向长度,因此,近年来得到了广泛的关注。当前,异极性永磁偏置磁悬浮轴承主要采用的结构是Okada等[9]提出的八极式结构,文献[10-11]也对该种磁悬浮轴承进行了研究和设计。而三极磁悬浮轴承可以利用传统的三相逆变器来代替磁悬浮轴承的开关功放,可以进一步减小磁悬浮轴承的成本和功耗。在第9届磁悬浮国际会议上,Reisinger等[12]结合这两种磁悬浮轴承的优点,提出了一种六极异极性径向永磁偏置磁悬浮轴承的结构,大致介绍了此种磁悬浮轴承的工作原理并讨论了永磁体的嵌放工艺。本文在此基础上深入地研究了这种结构的磁悬浮轴承。
1 磁悬浮轴承的结构及模型的建立
1.1 六极异极性磁悬浮轴承的工作原理
六极异极性径向永磁偏置磁悬浮轴承的结构示意图见图1,定子铁芯由硅钢片叠压而成,定子上有6个磁极,其中3个主控磁极,标注为磁极1、2、3;3个永磁磁极,标注为a、b、c。控制线圈缠绕在3个主控磁极上用来产生控制磁通,永磁体安放在3个永磁磁极上用来产生偏置磁通。图1中,α=60°为主控磁极与永磁磁极间的夹角,带箭头的实线表示控制磁通,带箭头的虚线则表示偏置磁通。这里定义由永磁磁极指向主控磁极的磁通方向为正方向,对控制磁通来说,增大这一趋势的磁通以及磁动势为正方向,反之为负方向。
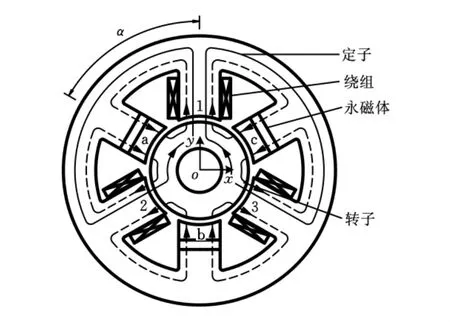
图1 六极异极性径向永磁偏置磁悬浮轴承的结构示意图
转子处于平衡位置时,由于结构对称,永磁体产生的磁通在各个磁极气隙处均相等。若不计重力,各气隙处定子对转子产生的吸力相等,x、y轴合力为零。此时,若转子受到一个y轴负方向的干扰力,转子将会偏离平衡位置向下运动,这将造成磁极1、a、c处的气隙增大,而2、3、b处的气隙减小,则永磁体提供的磁通发生变化,对转子产生y轴负方向的吸力,继续增大转子向y轴负方向运动的趋势。此时位置传感器检测到转子偏离平衡位置,控制系统将根据这一位置偏差信号产生控制电流,通过定子绕组产生一个y轴正方向的磁动势,这一磁动势将在磁极1处产生正方向的磁通,而在磁极2、3处产生负方向的磁通,从而使得磁极1气隙处的磁感应强度增大,而磁极2、3处的磁感应强度减小,定子对转子产生y轴正方向的吸力,克服扰动力,使转子回到平衡位置。
1.2 悬浮力模型的建立
首先对磁悬浮轴承的磁路进行分析,使用等效磁路法时作了如下假设:定转子铁芯均处于不饱和的线性区,忽略铁磁材料的磁阻,磁通仅在磁极和气隙的横截面中通过。六极异极性径向永磁偏置磁悬浮轴承的等效磁路图见图2。
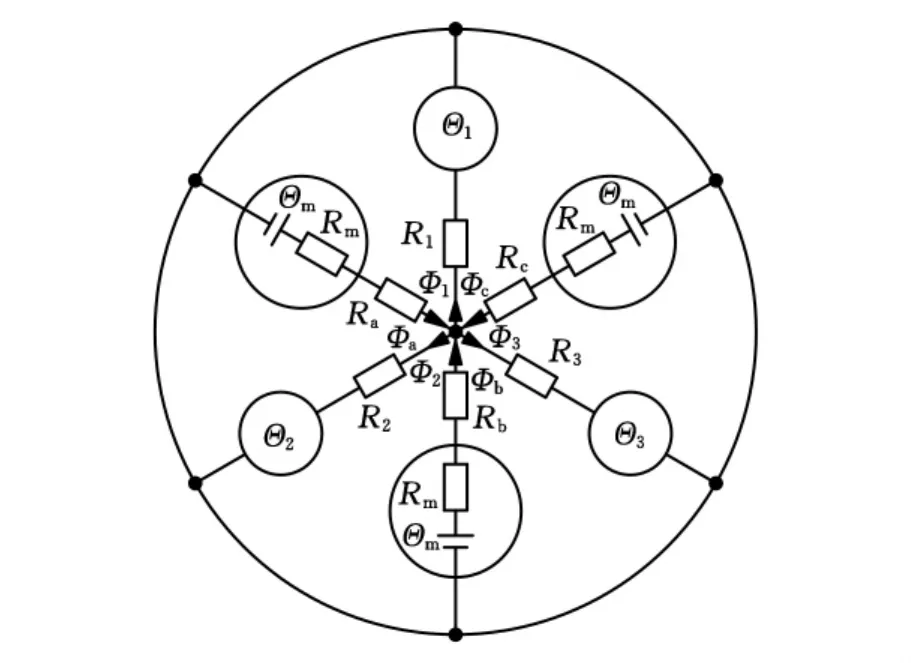
图2 六极异极性径向永磁偏置磁悬浮轴承的等效磁路图
首先令三个主控磁极上的磁动势Θ1、Θ2、Θ3为零,分析永磁磁路。可以看出,永磁体a产生的磁通由磁极a流出经过a处气隙到转子,后分为两路经气隙1、2至主控磁极1、2,最后经过定子轭回到永磁体a。经分析,气隙1处的磁通由永磁体a和c共同作用产生,气隙2处磁通则由永磁体a和b共同作用产生。b、c两处永磁磁极与之类似。这里作如下假设:将永磁体a、b、c等效为磁动势Θm与永磁体磁阻Rm串联。根据磁路基尔霍夫定律可得
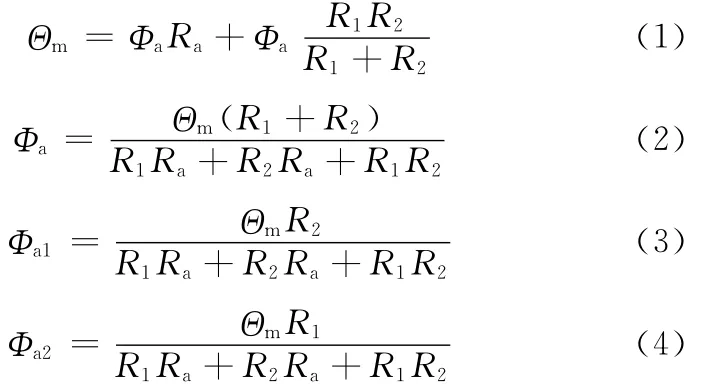
式中,R1、R2、Ra分别为气隙1、2、a处的磁阻;Θm为永磁体提供的磁动势;Φa为永磁体a在气隙a处产生的磁通;Φa1、Φa2分别为永磁体a在气隙1、2处产生的磁通。
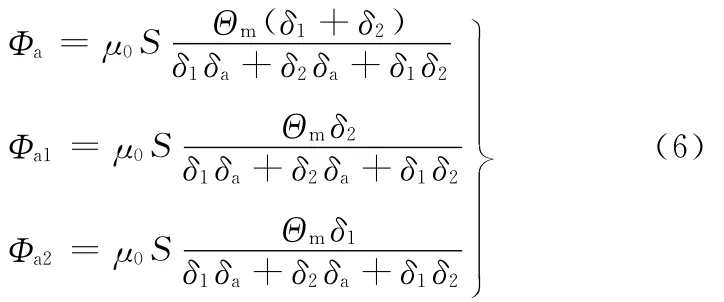
气隙处的磁阻为

式中,Ri为气隙i处的磁阻;μ0为真空磁导率;S为磁极面积;δi为i处的气隙长度。
将式(5)代入式(2)~ 式(4)可得
按照同样的分析方法可以得出永磁体b、c产生的磁通:
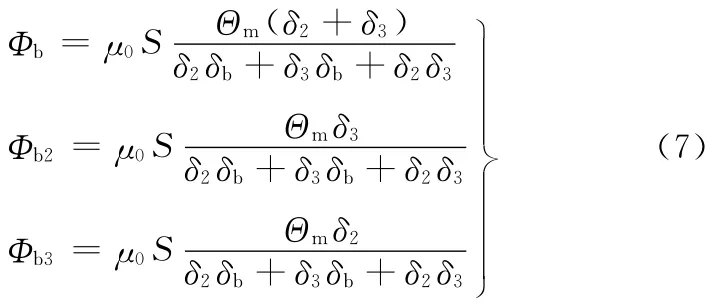
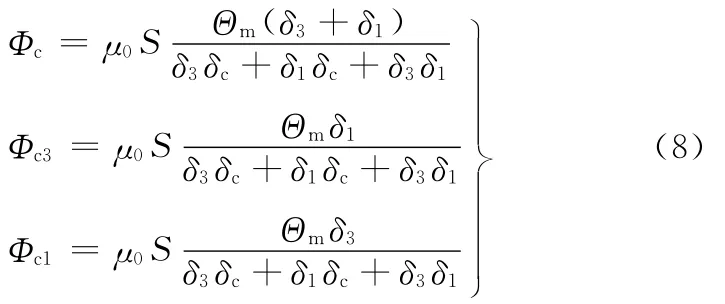
进一步分析电磁磁路,从图2可以看出,计算电磁磁路时需要考虑永磁体的磁阻,由于永磁体的磁阻很大,电磁所产生的磁通几乎无法通过三个永磁磁极,仅在三个主控磁极处流通。因此,这种结构的磁悬浮轴承的电磁磁路与一般三极主动磁悬浮轴承[13]完全相同,可以得到电磁在三个主控磁极处产生的磁通:
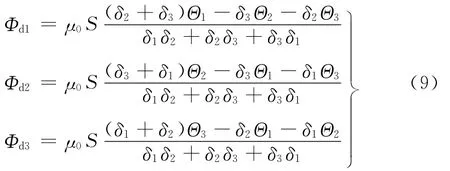
式中,Θ1、Θ2、Θ3分别为线圈1、2、3产生的电磁磁动势;Φd1、Φd2、Φd3分别 为 电 磁 线圈在气 隙 1、2、3 处 产 生的磁通。
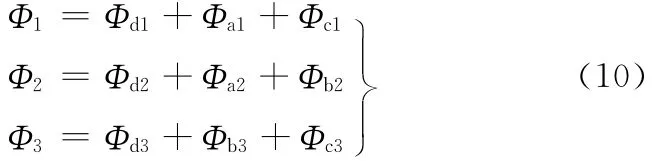
根据式(6)~ 式(9)可以得到气隙1、2、3处的总磁通:
将6个磁极处的气隙长度折算到oxy坐标系上,由图1可以得到:
根据电机控制中的Clarke变换理论,可以将六极磁悬浮轴承三相绕组上的电流折算到oxy坐标系上,得到电流在两个坐标系下的转换关系:
式中,i1、i2、i3分别为定子线圈1、2、3上的电流;ix、iy分别为折算到x、y轴上的电流分量。
磁动势与电流的关系为
式中,N为线圈匝数;im为永磁体的等效励磁电流。
由图1可推导出x、y方向受到的电磁力公式:
将式(10)~ 式(13)代入式(14),假设转子只在平衡位置附近有微小的位移,则可根据式(15)对式(14)作线性化处理:
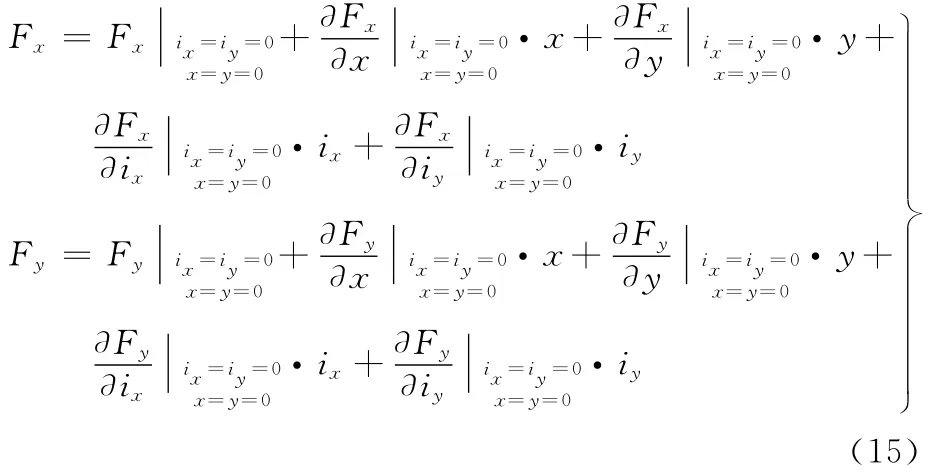
经过计算,可以得到x、y方向的磁场力合力方程:
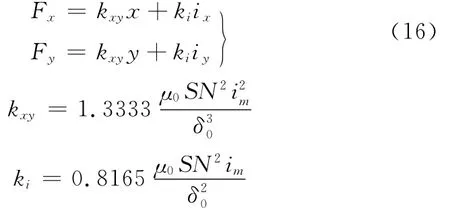
式中,kxy为位移-力系数;ki为电流-力系数。
从式(16)可以看出,相对于全电磁的主动磁悬浮轴承,六极异极性径向永磁偏置磁悬浮轴承的位移-力系数和电流-力系数不取决于偏置电流,而取决于永磁体的等效励磁电流,可以通过改变永磁体的尺寸来调节磁悬浮轴承的位移-力系数及电流-力系数。对比传统的八极式主动磁悬浮轴承,这种六极异极性径向永磁偏置磁悬浮轴承若令永磁体等效励磁电流im等于电磁偏置电流i0,则六极异极性径向永磁偏置磁悬浮轴承的位移-力系数大于传统的八极式主动磁悬浮轴承,而电流-力系数小于传统的八极式主动磁悬浮轴承。与传统的三极式电励磁主动磁悬浮轴承相比,六极异极性径向永磁偏置磁悬浮轴承x、y方向的电磁力与控制电流可以解耦,从而可使用两个独立的控制器进行控制,控制相对简单。
2 磁悬浮轴承主要参数的设计
本文研究的六极异极性径向永磁偏置磁悬浮轴承在某些设计环节上与一般的同极性径向永磁偏置磁悬浮轴承以及八极式异极性径向永磁偏置磁悬浮轴承有很大不同,主要表现在气隙磁通密度以及磁极面积的确定上。
2.1 气隙磁通密度的确定
传统的永磁偏置磁悬浮轴承在设计时通常根据承载力最大的原则将偏置磁通密度设计为饱和磁通密度的1/2左右。但是本文研究的六极异极性径向永磁偏置磁悬浮轴承不能以此为依据。
首先分析x方向的承载力。如图1所示,当转子处于平衡位置时,三个永磁磁极a、b、c在各自气隙中产生的磁通不受控制电流的影响,其对转子产生的吸力相互抵消。而主控磁极1对x方向不产生力的作用,通过式(9)和式(12)可以看出,x方向的电流在气隙2、3处产生的磁通大小相等方向相反。由此可以得出以下结论:当永磁体产生的偏置磁通B0=Bmax/2时,x轴正负方向的承载力最大。具体数值见表1。这与传统的永磁偏置磁悬浮轴承相同。
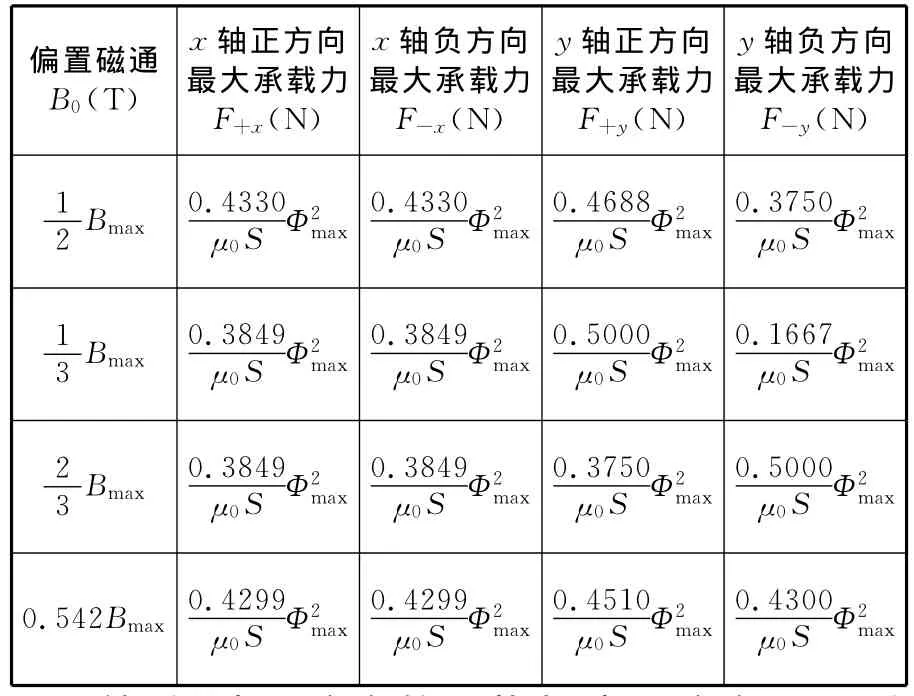
表1 不同偏置磁场下x、y方向最大承载力
然后分析y方向的承载力。与x方向不同,主控磁极1、2、3都对y方向有力的作用,且通过式(9)、式(12)可以看出,y方向的电流分量在气隙1处产生的磁通与气隙2、3处方向相反,且大小为气隙2、3处的2倍。从图1可以看出,当气隙1处磁通饱和而气隙2、3处磁通为零时,y轴正方向的吸力最大,不难解出此时需要使B0=Bmax/3。而要使y轴负方向的吸力最大,需要使气隙2、3处磁通饱和而气隙1处磁通为零,此时,需要使B0=2Bmax/3。可见,要使不同方向的承载力最大所需要的偏置磁通均不相同,而某一方向承载力最大可能造成另一个方向的承载力大为减小,具体数值见表1。因此,本文以x、y轴正负共4个方向所能够达到的最小悬浮力最大为原则设计偏置磁通。
设计时保证磁极1、2、3处的磁感应强度均不能超过铁磁材料的饱和磁感应强度Bmax。根据式(10)、式(14)将x、y轴上的电磁力方程简化为以下形式:
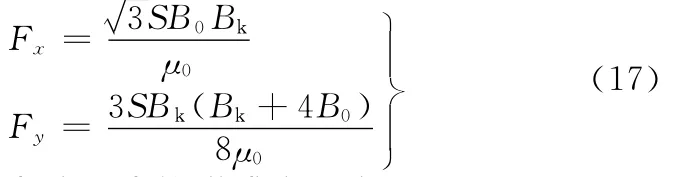
式中,Bk为控制电流产生的磁感应强度。
对于Fx设置的约束条件为Bk+B0∈[-Bmax,Bmax]。对于Fy约束条件为Bk+B0∈ [-Bmax,Bmax],且 -1/2Bk+B0∈ [-Bmax,Bmax]。由式(17)以及相关约束条件,设铁磁材料饱和磁感应强度为1.5T,按照前文所述的设计原则,可以解出永磁体产生的偏置磁感应强度为0.542Bmax时,x、y轴正负共4个方向所能够达到的最小悬浮力最大。此时,x轴正负方向的承载力略小于y方向,但是大于其他几种情况下的最小承载力,见表1。表1中,Φmax=BmaxS。
2.2 磁极面积以及气隙长度的确定
由表1可以看出,当永磁体产生的磁感应强度为0.542Bmax=0.813T时,x方向的承载力略小。因此,以x方向作为磁悬浮轴承能够承受的最大承载力来计算磁极面积S,即

式中,KFe为定子铁芯的叠片系数。
当气隙δ增大时,如果要产生同样大小的气隙磁通密度,则永磁体的尺寸以及安培导体数都必须增大,这会增大磁轴承的体积和重量;如果减小气隙δ则会要求加工精度提高,因此在工程上,δ一般取0.15~0.3mm。
至于永磁体的尺寸,可以用等效磁路法外加经验公式修正的方法大致计算,再到电磁场仿真软件中进行修正。为了提高设计的精度,还可以通过循环迭代的方法来获得磁场的磁阻系数以及漏磁系数[14]。
3 有限元分析
基于上述设计原则,对一个转动惯量380 kg·mm2,额定转速 3×104r/min,转子质量2.2kg的磁悬浮转子用六极异极性径向永磁偏置磁悬浮轴承进行了设计,主要设计参数见表2。
利用有限元分析软件分别建立了偏置磁场和控制磁场的二维模型,分析磁力线分布、磁感应强度分布和转子的受力情况。偏置磁场的仿真结果如图3、图4所示。其中,图3所示为转子处于平衡位置,且仅有永磁体激励的条件下,磁悬浮轴承中的磁力线以及磁感应强度分布情况,可以看出永磁磁场在磁悬浮轴承的6个磁极中均匀分布,各磁极与转子之间气隙处的磁感应强度均相等,从图4可以看出其大小在0.81T左右,符合设计要求。

表2 六极异极性径向永磁偏置磁悬浮轴承设计参数
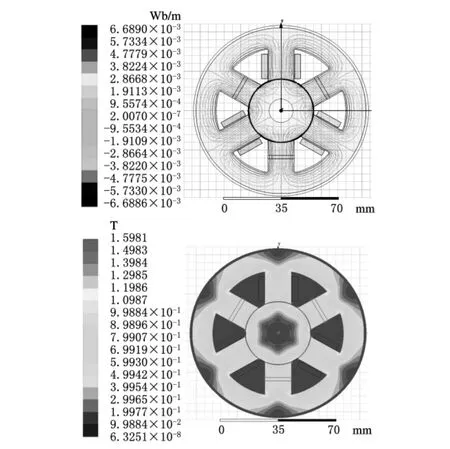
图3 永磁体磁力线及磁感应强度分布
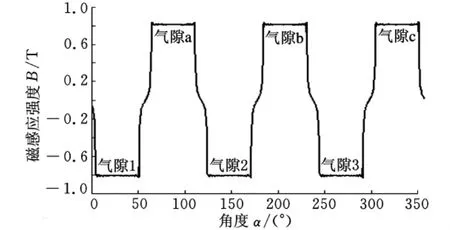
图4 气隙磁感应强度分布
本文对二维有限元模型进行了电磁力的仿真,结果如图5~图8所示。图5、图6为转子处于平衡位置时,改变x、y轴电流,转子受到电磁力的变化曲线。可以看出,虽然整个区域内悬浮力与电流成非线性关系,但是在平衡位置附近还是表现出了比较好的线性性质。x轴电流除了对转子x方向的受力有影响外,对转子y方向同样有力的作用,但是影响相对较小。而y轴电流基本上不影响转子x方向的受力。对比计算结果与仿真结果,仿真得到的x方向以及y轴正方向的电流-力系数在线性区域内与计算结果非常接近,平均误差为2.63%和2.62%。而y轴负方向的电流-力系数的线性范围较小,当y轴负方向电流安匝数超过50时就表现出了明显的非线性特征。
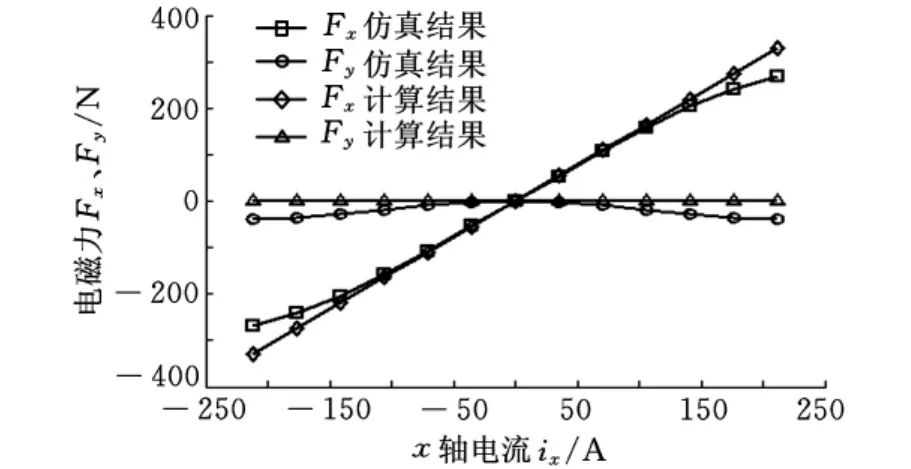
图5 x轴电流对转子x、y方向受力的影响
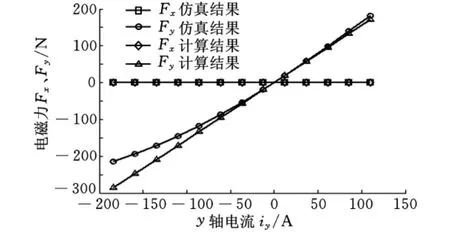
图6 y轴电流对转子x、y方向受力的影响
图7、图8所示为电流激励为零时,使转子偏离平衡位置,转子在x、y方向的受力情况。可以看出,在-0.1~0.1mm 的位移范围内,在x方向,转子的位移与受力有很好的线性度;而在y方向,位移-力曲线则表现出了较多的非线性特征。与电流-力的关系类似,转子在x方向的位移对转子在y方向的受力有微小的影响,但是y方向上的位移基本上不影响转子x方向的受力。这都是因为定子在y方向上的结构并不对称。对比计算结果和仿真结果,在x方向,计算出的位移-力系数大于仿真得到的结果,平均误差高达60.97%。在y方向,y轴正方向上的位移-力系数计算结果与仿真结果较为接近,平均误差为22.58%。而y轴负方向上位移-力系数计算结果同样与仿真结果差距较大。这是因为在计算位移-力系数时,仅将转子看作一个质心来计算其相对每个磁极的位置,这与实际情况存在差异,因此导致了计算结果的误差。可见,利用等效磁路法计算得到的位移-力系数需要经过修正才能较为准确地表现转子的悬浮特性。
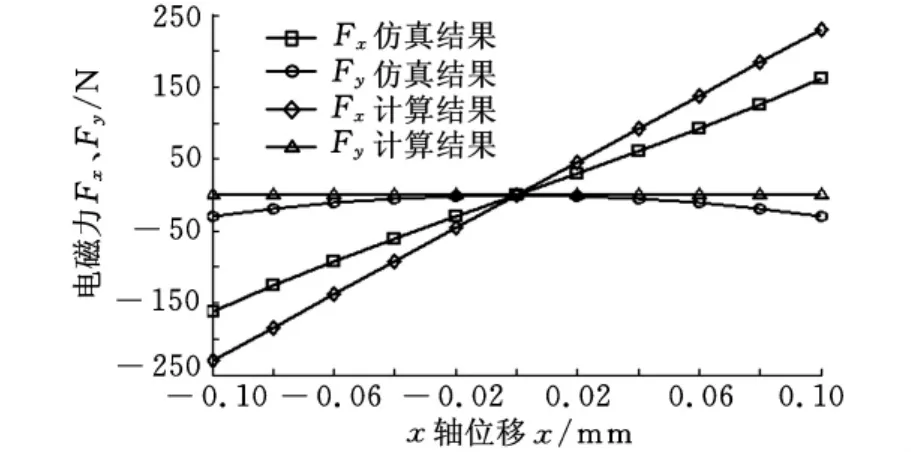
图7 x轴位移对转子x、y方向受力的影响
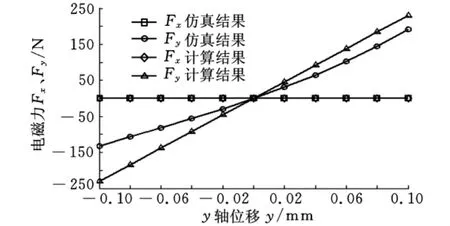
图8 y轴位移对转子x、y方向受力的影响
为验证2.1节中各方向最小承载力最大的理论计算,本文对不同偏置磁场下转子x、y方向受到的悬浮力进行了仿真,结果如图9、图10所示。可以看出,在x、y方向,单位电流产生的悬浮力与偏置磁感应强度B0成正比。而当软磁材料严重饱和时,B0=0.91T情况下的承载力最大。这与表1中的结论有出入,原因是理论计算时,假定软磁材料达到1.5T时为饱和,因而设置了磁感应强度不超过1.5T的约束条件,而在仿真中,磁路中的磁感应强度即使超过1.5T依然会随磁动势的增大而增大。在设计中,这种让软磁材料严重饱和的情况是会被避免的。若将1.5T设为软磁材料的磁感应强度上限,则得到的结果与理论分析一致。
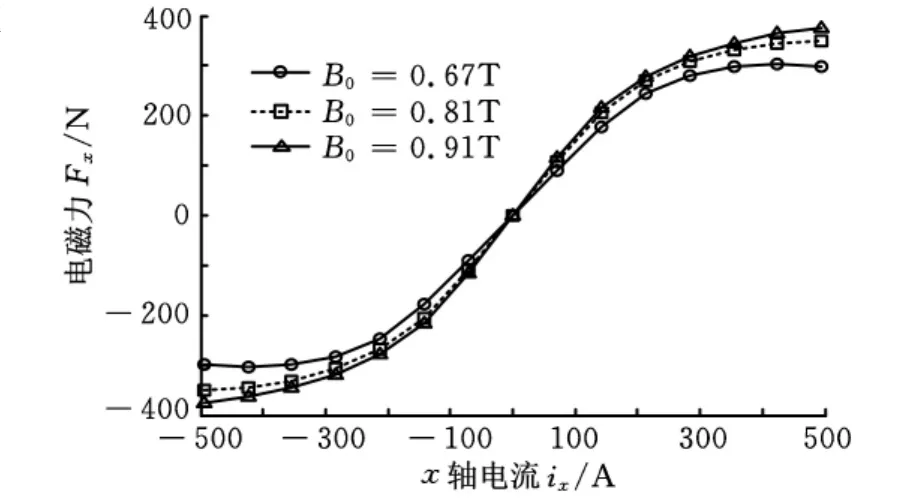
图9 不同偏置磁感应强度下转子x方向的受力情况
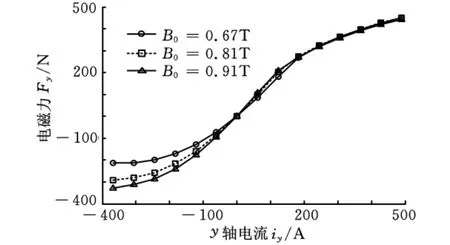
图10 不同偏置磁感应强度下转子y方向的受力情况
4 结论
(1)在永磁体等效励磁电流等于偏置电流的情况下,六极异极性径向永磁偏置磁悬浮轴承的位移-力系数大于传统的八极式主动磁悬浮轴承,而电流-力系数小于传统的八极式主动磁悬浮轴承。
(2)与三极式电励磁主动磁悬浮轴承相比,六极异极性径向永磁偏置磁悬浮轴承x、y方向的电磁力与控制电流可以解耦,控制简单。
(3)仿真结果表明,在x方向,转子受力与转子位移以及控制电流的线性区域大于y方向。仿真结果与计算结果的对比表明,按照等效磁路法计算出的电流-力系数与仿真结果较为接近,而位移-力系数则与仿真结果存在一定的误差。
[1]Schweiter G,Bleuler H,Traxler A.Active Magnetic Bearings-Basics,Properties and Application of Active Magnetic Bearings[M].Zurich:Vdf Hochschulverlag,1994.
[2]Sun J,Fang J.A Novel Structure of Permanent Magnet Biased Radial Hybrid Magnetic Bearing[J].Journal of Magnetism and Magnetic Materials,2011,323(2):202-208.
[3]Sortore C K,Allaire P E,Maslen E H,et al.Permanent Magnet Biased Magnetic Bearings-Design,Construction and Testing[C]//Second International Symposium on Magnetic Bearings.Tokyo,1990:175-182.
[4]Ehmanm C,Sielaff T,Nordmann R.Comparison of Active Magnetic Bearings with and without Permanent Magnet Bias[C]//Ninth International Symposium on Magnetic Bearings.Lexington,2004:105-110.
[5]赵旭升,邓智泉,王晓琳,等.永磁偏置磁轴承的研究现状及其发展[J].电工技术学报,2009,24(9):9-20.
Zhao Xusheng,Deng Zhiquan,Wang Xiaolin,et al.Research Status and Development of Permanent Magnet Biased Magnetic Bearings[J].Transactions of China E-lectro Technical Society,2009,24(9):9-20.
[6]Zhilichev Y.Analysis of a Magnetic Bearing Pair with a Permanent Magnet Excitation[J].IEEE Transactions on Magnetics,2000,36(5):3690-3692.
[7]曾励,汪通悦,徐龙祥,等.永磁电磁轴承产生悬浮力的机理研究[J].航空学报,2000,21(3):219-221.
Zeng Li,Wang Tongyue,Xu Longxiang,et al.Study on Mechanism for PMEB to Produce Magnetic Suspension Force[J].Act Aeronautica Et Astronautica Sinica,2000,21(3):219-221.
[8]孙津济,房建成,王曦,等.一种新型结构的永磁偏置径向磁轴承[J].电工技术学报,2009,24(11):53-60.
Sun Jinji,Fang Jiancheng,Wang Xi,et al.A New Permanent Magnet Biased Radial Magnetic Bearing[J].Transactions of China Electro Technical Society,2009,24(11):53-60.
[9]Okada Y,Koyanayi H,Kakihara K.New Concept of Miracle Magnetic Bearings[C]//Ninth International Symposium on Magnetic Bearings.Lexington,2004:89-95.
[10]房建成,孙津济.一种磁悬浮飞轮用新型永磁偏置径向磁轴承[J].北京航空航天大学学报,2006,32(11):1304-1307.
Fang Jiancheng,Sun Jinji.New Permanent Magnet Biased Radial Magnetic Bearing in Magnetic Suspending Flywheel Application[J].Journal of Beijing University of Aeronautics and Astronautics,2006,32(11):1304-1307.
[11]黄峰,朱火晃秋,谢志意,等.径向两自由度混合磁轴承参数设计与分析[J].中国机械工程,2007,18(10):1143-1146.
Huang Feng,Zhu Huangqiu,Xie Zhiyi,et al.Parameter Design and Analysis for Two-degrees of Freedom Radial Hybrid Magnetic Bearings[J].China Mechanical Engineering,2007,18(10):1143-1146.
[12]Reisinger M,Amrhein W,Silber S,et al.Development of a Low Cost Permanent Magnet Biased Bearing[C]//Ninth International Symposium on Magnetic Bearings.Lexington,2004:113-118.
[13]唐启斌,赵荣祥,杨欢.逆变器供电式三极电磁轴承研究[J].机电工程,2006,23(5):5-9.
Tang Qibin,Zhao Rongxiang,Yang Huan.Study on Inverter-fed Three-pole Active Magnetic Bearing[J].Mechanical & Electrical Engineering Magazine,2006,23(5):5-9.
[14]梅磊.混合磁悬浮轴承基础研究[D].南京:南京航空航天大学,2008.
