平地假设与残余运动误差对机载重轨干涉SAR系统性能的影响分析
2013-07-25李芳芳胡东辉丁赤飚
林 雪*①②③ 李芳芳①②③ 胡东辉①② 丁赤飚①②
平地假设与残余运动误差对机载重轨干涉SAR系统性能的影响分析
林 雪李芳芳胡东辉丁赤飚
(中国科学院空间信息处理与应用系统技术重点实验室 北京 100190)(中国科学院电子学研究所 北京 100190)(中国科学院大学 北京 100049)
对合成孔径时间长、方位空变误差大的重轨干涉SAR (InSAR)进行成像时,为简化时域算法模型而引入的平地假设和由导航系统精度而引入的残余运动误差会对成像及干涉测量产生影响。该文针对平地假设引入的高程误差和导航系统精度引入的残余运动误差进行了系统分析,对其在单次航过中引入的成像距离历程误差进行建模,从理论上分析了其对平面定位、干涉相位及DEM精度的影响,最后通过仿真及实测数据实验验证了理论分析的正确性。该文的分析结论为机载重轨干涉SAR系统设计和信号处理提供了理论依据。
平地假设;残余运动误差;重轨;干涉SAR (InSAR)
1 引言
获取植被覆盖区域的高精度数字地形模型(Digital Terrain Model, DTM)需要雷达工作在较长的波段范围,如L波段或P波段,使其可以穿透植被,到达地表。为达到与短波段同样的地形测绘精度,工作在长波段的系统就需要更长的基线,这在单轨系统上是很难实现的,因此采用可以灵活实现各种长度和角度基线矢量的重轨干涉模式就变得非常必要。另外,由于重轨干涉只用一套雷达和天线,可以节约成本,对运载工具的要求也较低。机载重轨干涉SAR (Interferometric Synthetic Aperture Radar, InSAR)在灵活获取高精度数字地形模型和地表形变监测方面占有重要地位,且具有波束覆盖范围大,轻重量,小体积和低功耗等特点,具有研究价值。
机载干涉SAR由于平台受气流扰动的影响,实际运动轨迹偏离理想轨迹,对成像和干涉测量影响显著,因此干涉SAR运动补偿是实现高精度机载干涉SAR测量的关键。对于运动补偿的研究集中在运动误差影响分析和运动补偿算法的研究两方面。其中基于运动传感器的频域运动补偿方法在合成孔径较短的单轨干涉SAR成像过程中得到了广泛应用。而对于大波束覆盖范围的重轨干涉及超宽带SAR而言,由于合成孔径时间长,方位空变误差较大,在轨迹偏移误差大、地形起伏剧烈的情况下,可能无法满足目前频域运补算法所默认的方位空变误差小于一个距离门的前提,从而使算法失效。为获取精确的成像结果,可选择采用时域算法进行处理。BP算法作为一种精确的时域算法,根据图像像素位置计算雷达天线和像素点之间的距离延时,将雷达回波数据根据时延信息反向投影到图像域,并在每个像素点累加,从而得到2维图像。其可以在任意成像几何下使用,对雷达平台运动轨迹没有特殊要求,适用于重轨干涉及超宽带SAR系统。
在使用BP算法成像时,可引入平地假设来简化算法模型,这一假设会在成像距离历程引入误差。前人的研究多是基于频域算法分析平地假设带来的影响,对时域成像算法的研究仅限于简单的定性分析,且未涉及该误差对干涉测量带来的影响。
另外,现有导航系统的精度只能达到1-5 cm,与干涉SAR高精度运动补偿所要求的毫米甚至亚毫米量级的重构基线精度有所差距,即便采用精确的BP算法,仍会存在由导航系统精度引入的残余运动误差。对于重轨干涉SAR而言,该误差在两次航过中相互独立,无法通过计算干涉相位相互抵消,因而相比于双天线干涉SAR系统,除了要求对单个通道的数据进行更高精度保相的运动补偿之外,还需要对该残余误差进行估计和补偿。前人对这方面的研究主要集中在时变基线估计算法上,提出了MS(MultiSquint technique), RMS (Refined MultiSquint technique), EMS (Extended Multi- Squint technique), WPCA(Weighted Phase Cur- vature Autofocus)等一系列估计算法。然而,在残余误差对成像结果及干涉测量的影响方面尚未有系统的研究。
针对上述问题,本文对平地假设引入的高程误差和导航系统精度导致的残余运动误差进行了系统分析,推导了其对成像结果和干涉测量影响的表达式,为后续系统设计和数据处理提供理论依据。本文的内容安排如下:第1节简单介绍了目前机载重轨干涉SAR的研究背景及不足,明确本文的研究范畴;第2节对高程误差在单次航过中的影响进行建模,分析了该误差对平面定位、干涉相位及DEM精度的影响;第3节推导了由导航系统精度导致的残余运动误差在成像历程中的误差模型,并分析了该误差对成像结果与干涉测量的影响。第4节通过仿真及实测数据验证了理论分析的正确性;最后对本文内容进行了总结概括。
2 高程误差分析
高程误差由平地假设引入,其在一次获取数据过程中误差量值保持不变,可归入固定误差。不失一般性,设正侧视下,某高程未知目标成像几何如图1所示。其中,轴表示水平方向,轴表示竖直方向,轴表示第1次航过的参考轨迹,轴表示第2次航过的参考轨迹。两次航过的载机参考位置分别为和和分别表示两次航过的载机实际位置,为波束中心时刻载机相对于目标点的下视角。设目标点相对于参考平面的高度为,且两次航过中,根据波束中心时刻载机到点的斜距,计算得到参考平面上的点分别为,,又设两次航过的参考平面相同,则。对于重轨干涉,基线转化为两次航过的参考航迹的差异,设基线长为,基线角为。
2.1 高程误差对单次航过的影响
由于点的高度未知,在成像时是以参考平面来进行的。根据波束中心时刻的长度,计算得到参考平面上的点为点,即有。于是点的实际斜距历程及成像斜距历程分别为

(3)
当运动轨迹误差不为0或常数时,由泰勒公式近似,得
(5)
由上式可知,当存在轨迹误差时,平地假设会在地距平面引入误差,误差量随平地假设带来的高程误差增大而增大,且参考平面对应的成像点与载机实际位置间的地距越大,变化越慢;载机实际高度与参考平面高度差越大,变化越快。该地距误差表达式同样适用于运动轨迹为0或常数的情况。
将式(5)代入式(4),整理得到高程误差引入的斜距误差模型

由此可见,当存在高程误差时,会在成像过程中引入斜距误差,该误差在波束中心时刻为0,且与运动误差呈现相同(线性、2次、高次等)形式。
2.2 高程误差对重轨干涉的DEM影响
(8)
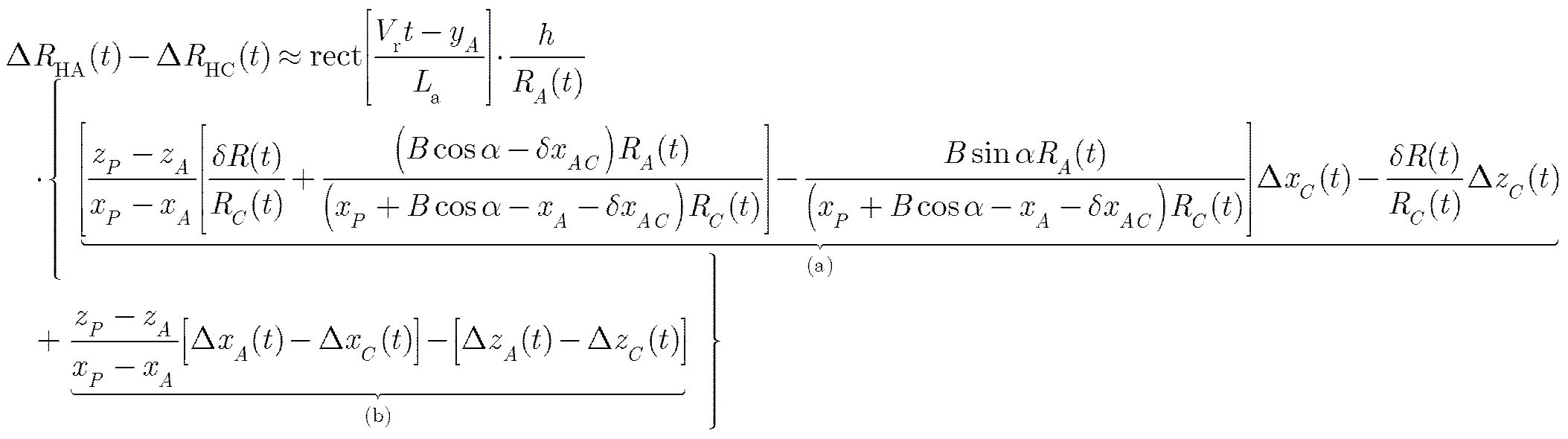
上式中大括号中(b)所示部分较(a)所示部分在数量级上偏大,是引起斜距误差的主要因素,因此两次航过的轨迹误差差异较大时,高程误差的影响将明显加剧。
斜距误差会影响目标的峰值相位,进而引起干涉相位的误差。由斜距与相位关系式得,高程误差引入的相位误差为
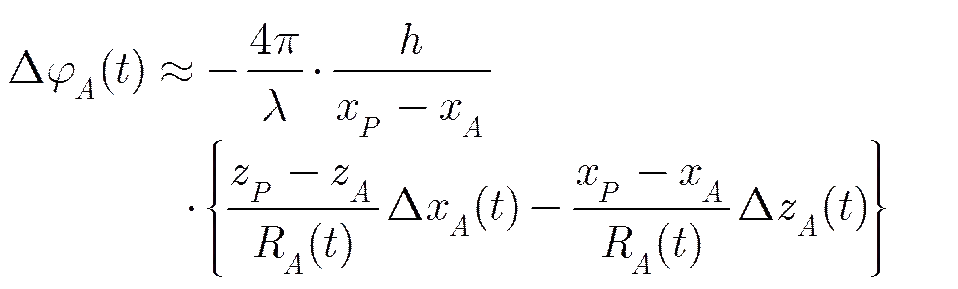
(11)
(12)
2次相位误差将会导致目标点聚焦质量下降,通常要求峰值相位误差在合成孔径时间内不超过。
由DEM相对于相位的敏感度方程
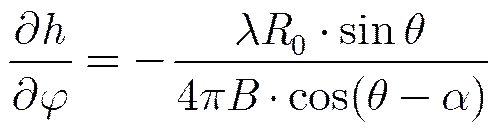
得到干涉相位误差引入的DEM误差为
(13)
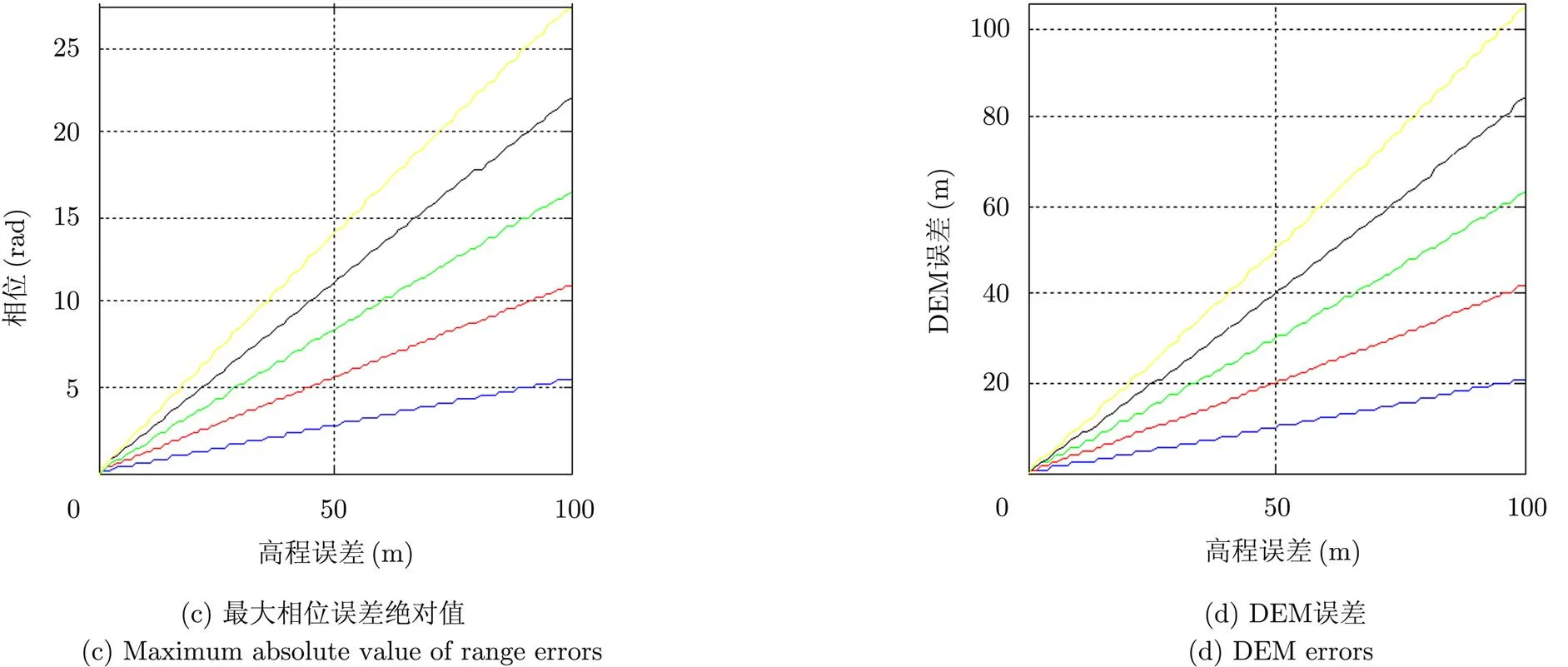
以表1中P波段机载重轨干涉系统参数为例,设1个合成孔径时间内,第1次航过的运动误差如图2(a)、图2(e)所示,第2次航过的运动误差为0,且水平与垂直方向的运动误差相同。观察高程误差引入的斜距误差、相位误差及DEM误差,如图2(b)~图2(d)(对应图2(a)所示误差)以及图2(f)~图2(h)(对应图2(e)所示误差)所示,可知,在该系统参数下,存在5 m和10 m的轨迹误差时,相位误差远大于,因此会造成目标严重散焦,同时可知在该相位误差下,50 m的高程误差分别会引入20 m和40 m的DEM误差,对于轨迹偏差更大、地形起伏更剧烈的情况,DEM误差将会更大,对于高精度干涉测量而言,该误差不可忽视,对干涉系统的测绘精度影响显著,必须在成像处理中予以补偿。
表1仿真参数
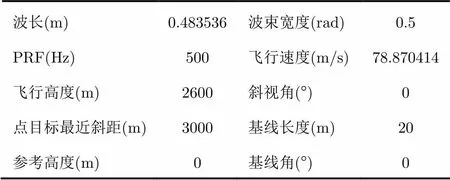
Tab. 1 Simulation parameters
2.3 平面定位误差
斜距误差除了会引起干涉相位及DEM误差外,还会对目标的平面定位有影响。对于误差的各频率分量,1次误差分量主要造成方位向偏移。由斜距误差引入的信号频偏为,又方位向调频率为,其中表示目标点的最近斜距,得目标的方位向偏移为

则单幅图像的目标方位向偏移为

SLC图像对的方位向相对偏移误差为
(15)
同样以表1中参数为例,观察高程误差引入的目标方位偏移,如图3(其中,图3(b)对应图3(a)所示误差,图3(d)对应图3(c)所示误差)所示。可知,在该系统参数下,存在5 m如图所示的轨迹误差时,50 m的高程误差分别会引入6个像素和15个像素的目标方位偏移,这将使干涉图像对失配,令获取的DOM及地理编码图像无法满足高精度测量需求。
3 残余运动误差分析
目前最常用的运动测量系统大多是基于IMU(或INS)/DGPS的组合运动测量系统,此类系统通过组合滤波实现两种运动传感器的优势互补。文献[4]根据SAR成像特点,认为影响成像质量的主要是运动测量系统输出的短期误差特性,并基于为保证运动测量数据的平滑特性而在短期内采用纯惯性解算输出进行运动补偿的方案,提出直接影响系统性能的残余运动误差主要是IMU的测量误差。文献[22]给出了IMU测量误差导致的斜距向残余误差的表达式,得到残余误差呈现线性和2次低阶时变特性的结论。文献[4]通过实际运动测量系统的测量数据对该结论加以了验证。
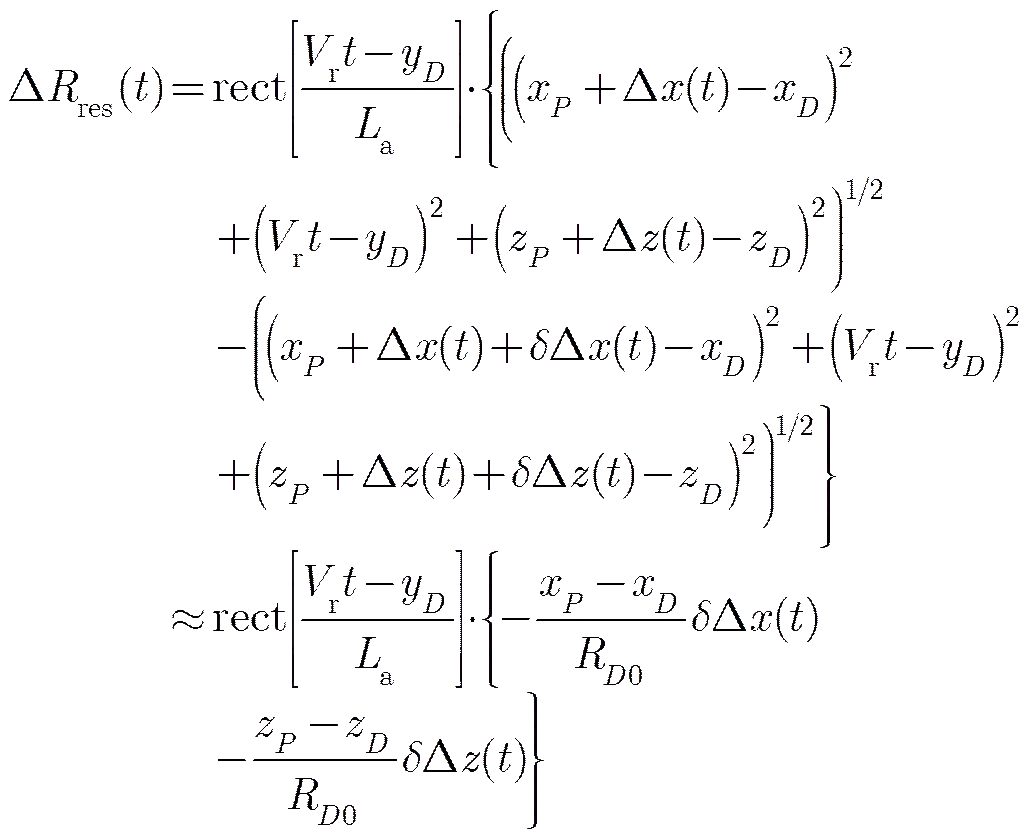
3.1 残余运动误差对单次航过的影响
设正侧视下,某高程已知目标的运补成像几何如图4所示,载机参考位置为,实际位置为,表示载机参考航迹,表示根据导航系统测得的载机运动补偿轨迹,表示载机实际运动轨迹。目标相对于参考平面的高度为,成像处理中已进行了引入DEM的运动补偿,但由于导航系统精度限制,运动补偿曲线存在误差。
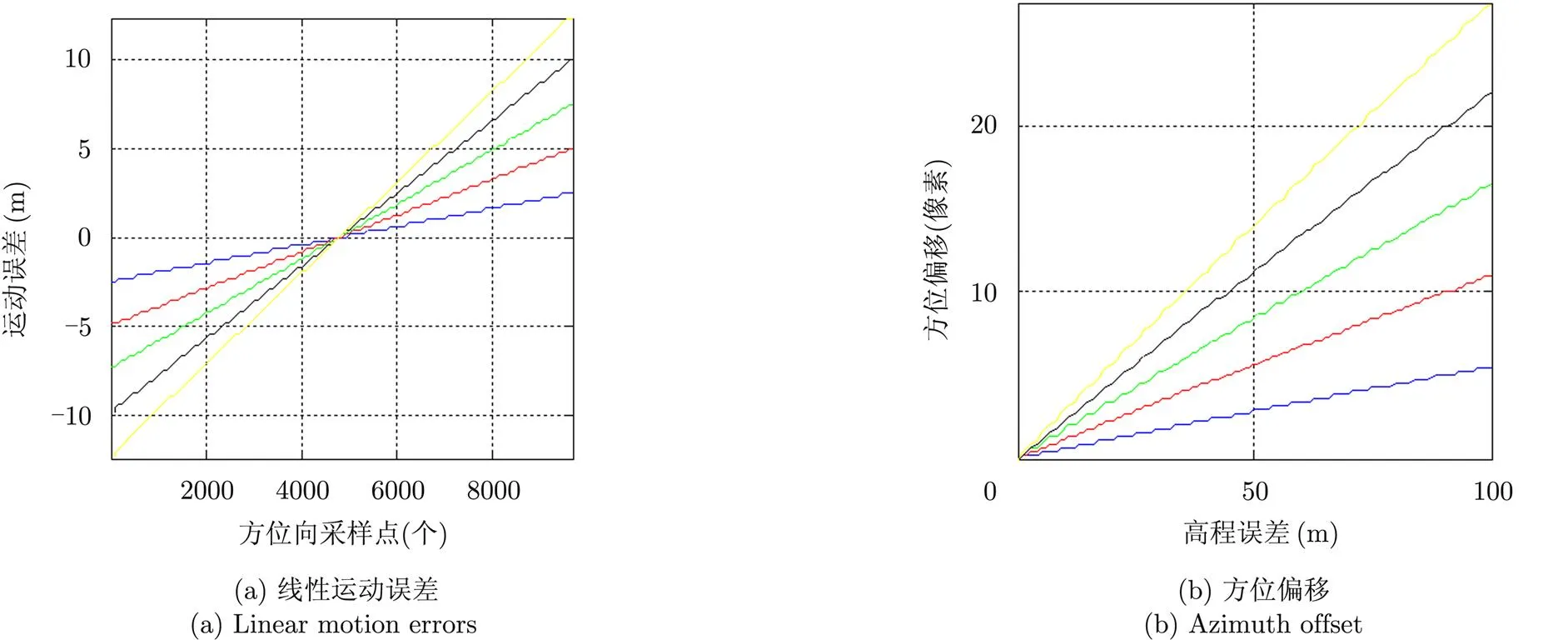
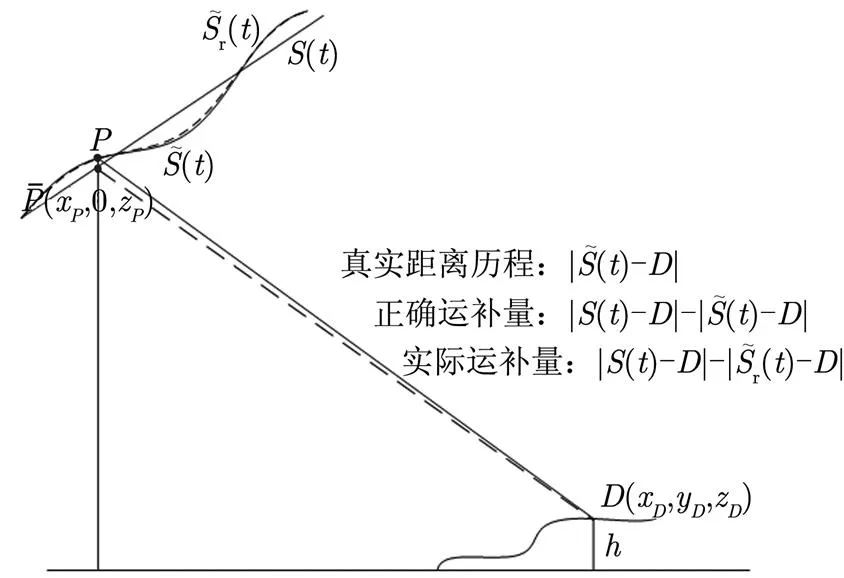
图4 存在残余运动误差的成像几何
由上式可知,在目标位置与运动误差一定时,残余误差引入的斜距误差将与残余误差呈现相同形式。同时,对比高程误差分析结果可知,对高程误差而言,水平和垂直方向运动误差正负相同时,引入的斜距误差较大,而残余水平和垂直误差正负相反时,引入的斜距误差较大。从物理意义上讲,高程误差与残余运动误差在成像过程中的表现都是引起了斜距历程误差,因此二者的误差形式是相似的,但高程误差是由平地假设引起的,可通过在成像算法中引入DEM得到补偿,而残余运动误差是由目前导航系统精度限制所引起的,是系统的固有误差,无法通过引入外部数据得到改善,只能通过某些后续算法估计得到。
3.2 残余运动误差对重轨干涉的DEM影响
(18)
与高程误差相似,上式中大括号中(b)所示部分较(a)所示部分在数量级上偏大,即两次航过的残余误差差异较大时,将引入较大的斜距误差不一致分量。根据斜距与相位关系式,得到残余运动误差引入的相位误差为
(21)
(22)
残余运动误差引入的DEM误差表达式同式(13)。
3.3 平面定位误差
类似高程误差分析中平面定位误差表达式,残余运动误差引入的单幅图像的目标方位向偏移为

SLC图像对的方位向相对偏移误差为
(24)
同样以表1中参数为例,设点目标高度为50 m,分别加入长度为一个合成孔径时间线性误差与正弦误差,且水平与垂直方向误差相反。目前已有的导航系统可达到的定位精度约为1~5 cm,观察残余误差幅值控制在0~10 cm之间时引入的斜距误差、相位误差、方位偏移及DEM误差,如图5所示(其中,图5(b)~5(e)对应图5(a)所示误差,图5(g)~5(j)对应图5(f)所示误差)。可知,该系统参数下,5 cm的残余误差即会引入的相位误差、1个像素以上的方位偏移以及6 m以上的DEM误差,无法满足干涉测量的精度要求,因此残余误差补偿非常必要。
4 实验结果分析
4.1 高程误差实验分析
本小节对机载干涉SAR进行成像及干涉仿真,采用P波段系统参数仿真生成平地和高程点目标回波,并进行成像及干涉处理。其中,在进行成像处理时,分别进行了在成像过程中未引入DEM即存在高程误差和引入DEM即不存在高程误差两种情况的处理,对这两种情况下得到的点目标成像结果进行指标测试分析及测量干涉相位,对比测量值与理想情况下的理论值的偏差,并将反演得到的DEM值与前文中的理论表达式(13)计算得到的值进行对比,从而验证理论分析的正确性。为方便论述,将第1次航过称作主天线,第2次航过称作辅天线。仿真系统参数如表2所示。点目标位置及主辅天线的运动误差如图6所示。
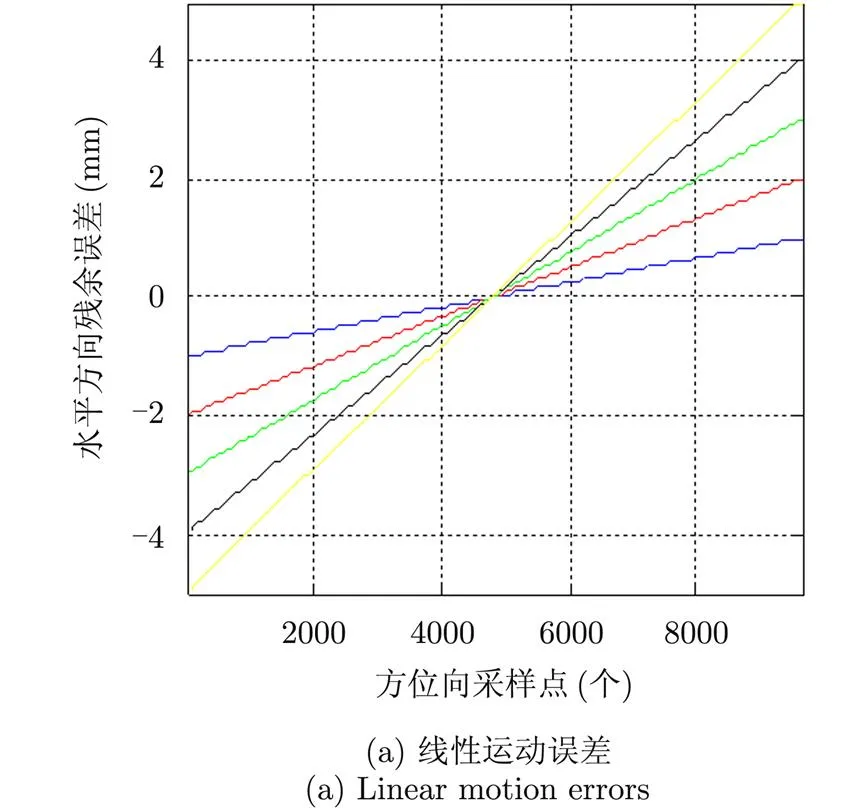
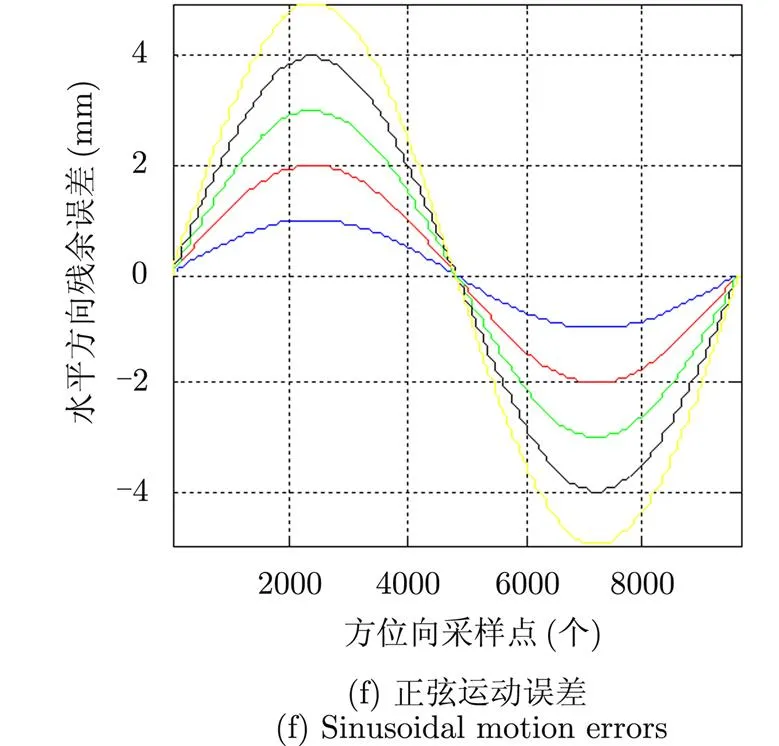
表2雷达系统参数

Tab. 2 Radar system parameters
仿真中采用的参考高程为0 m,当存在高程误差时,点目标成像位置会产生偏移,且严重散焦,如图7(a),7(c),7(d)所示,同时,观察图7(e)可知,峰值相位与理论值偏差大于,与前文中相位误差引起目标散焦的理论吻合;引入DEM进行成像处理后,点目标成像结果与理论值基本相符,如图7(b)~7(e)所示。反演得到的DEM误差如图7(f)所示,可知,由推导的表达式计算得到的DEM高度误差理论值与实际测量值基本相符,从而说明了理论分析的正确性。
4.2 残余运动误差实验分析
同样采用表2的系统参数,点目标位置及主辅天线的残余运动误差如图8所示。点目标指标测试结果如图9(a)~9(c)所示,可知,惯导误差会引入目标位置偏移,且使点目标质量下降,尤其是方位向较为严重;反演得到的DEM误差如图9(d)所示,可知,DEM高度误差的理论值与测量值基本相符,从而说明了理论分析的正确性。
4.3 实测数据实验分析
由于实测场景中缺乏定标点信息,因而无法直接对干涉测量的高程精度进行验证。同时,由于所选实测场景为平地场景,因此本文通过分别采用不同的参考高程对该实测数据进行运动补偿及成像处理,对比两次成像结果中孤立强散射点的理论与实际高程误差,从而间接地验证理论分析的正确性。
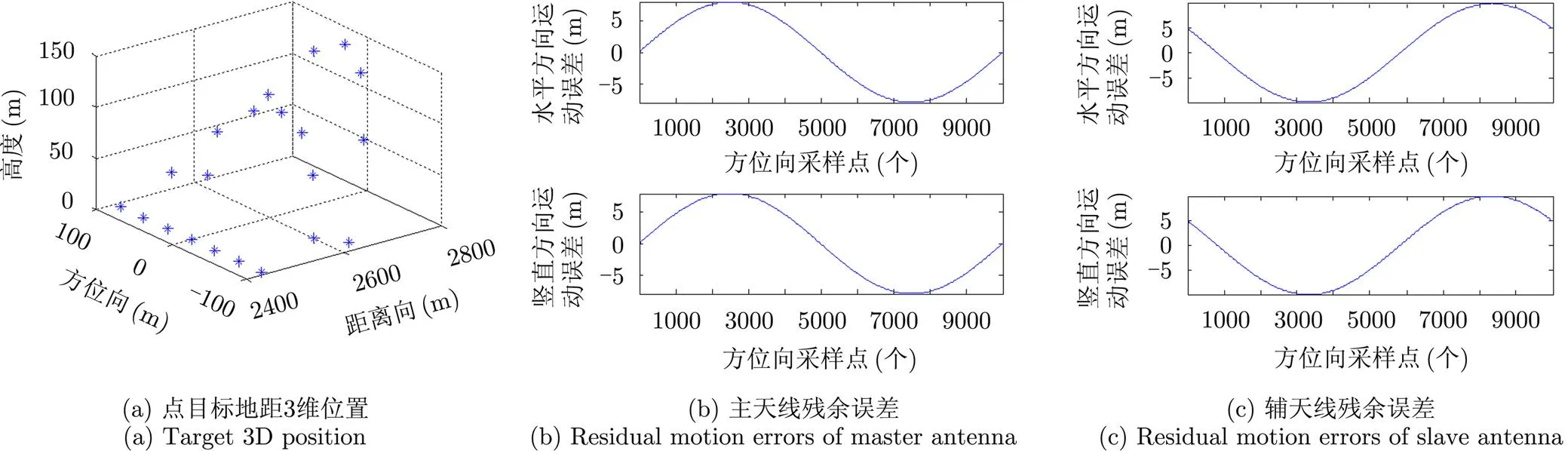
图6 点目标位置及主辅天线运动误差
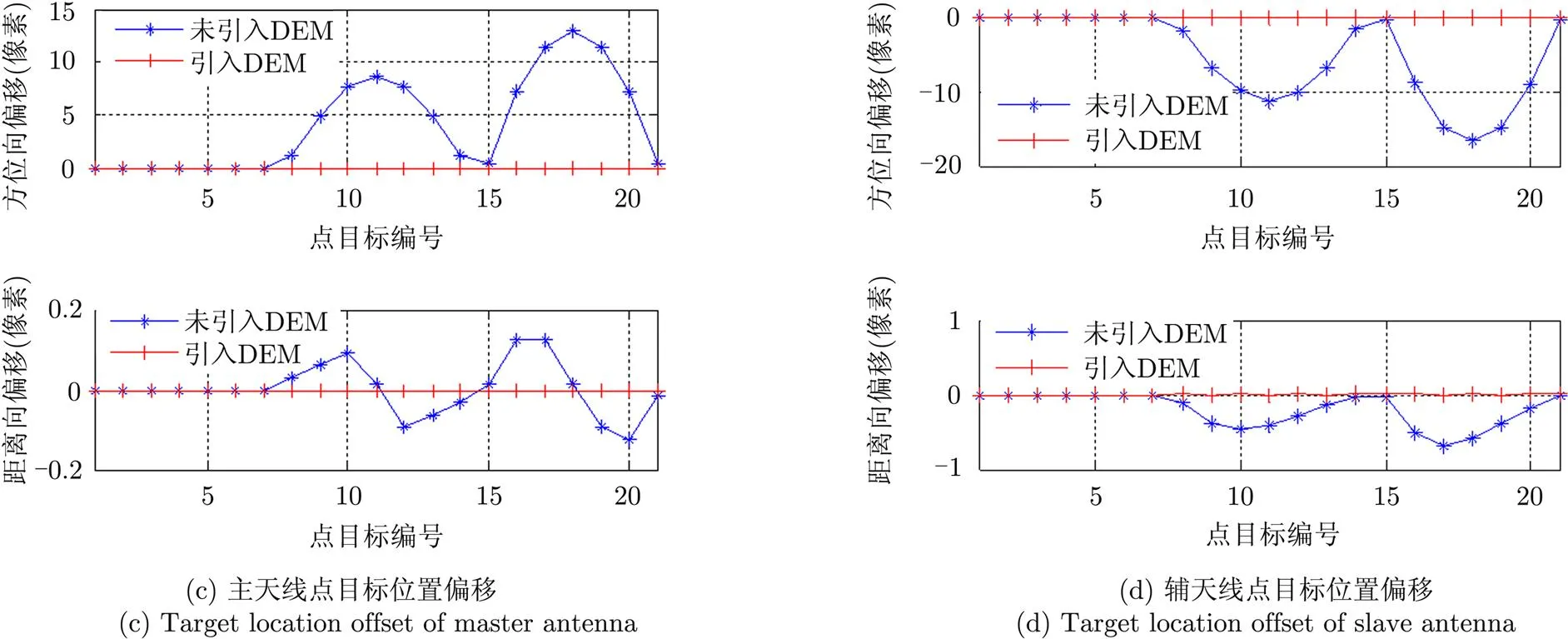
图8点目标位置及主辅天线运动误差
Fig. 8 Point target position and motion errors of master and slave antennae
两次运动补偿采用的参考高程分别为440 m, 940 m,成像结果分别如图10(a),图10(b)所示。对场景中所标注的孤立强散射点(图10中红色椭圆部分,目标从左至右依次编号为1~12)在两次成像结果中的平面位置偏差如图11(a)所示,可知,高程误差会引起位置偏移,影响成像质量。两次成像结果中的理论与实测DEM误差如图11(b)所示,从中可以看出,DEM高度误差的理论值与测量值基本相符,表明了理论分析的正确性。
5 结束语
本文对平地假设引入的高程误差和惯导系统精度导致的残余运动误差进行了系统分析,从理论上推导了高程误差和残余运动误差的误差模型及其对干涉相位、平面定位及DEM高度的影响,并通过仿真及实测数据实验验证了理论分析的正确性。本文的分析结论为机载重轨干涉SAR系统设计和数据处理提供了理论依据。

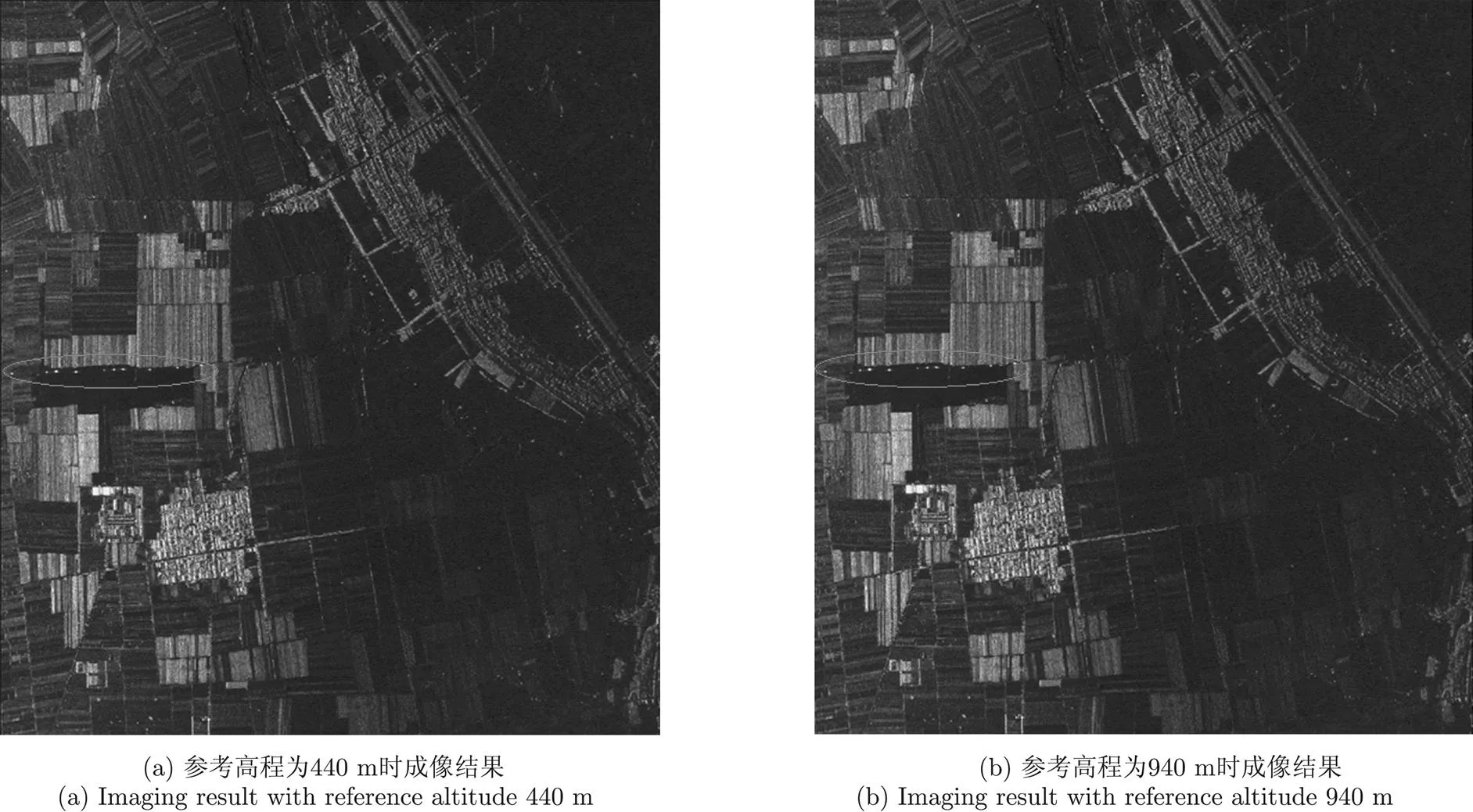
图10 不同参考高程成像结果
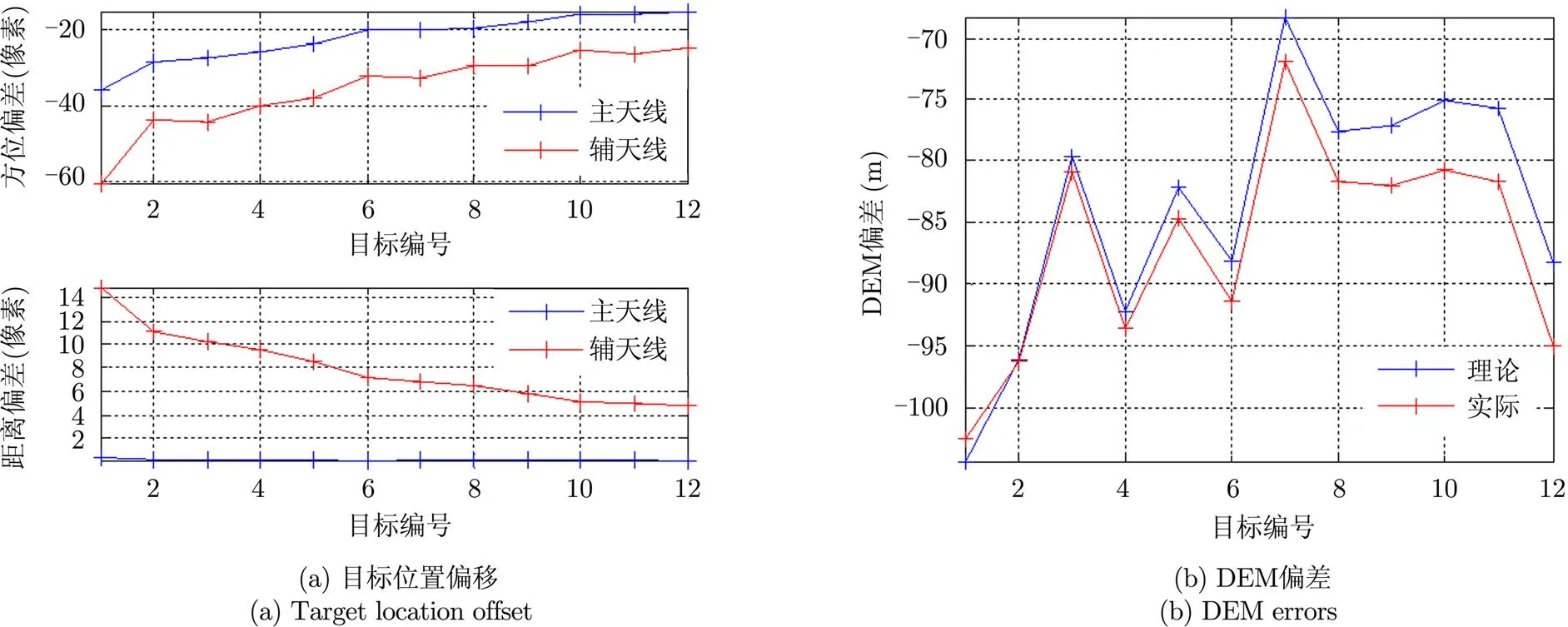
图11 目标位置偏移及DEM偏差
[1] 张澄波. 综合孔径雷达原理、系统分析与应用[M]. 北京: 科学出版社, 1989: 307-333.
Zhang Cheng-bo. Principle, System Analysis and Application of Synthetic Aperture Radar[M]. Beijing: Science Press, 1989: 307-333.
[2] Fornaro G. Trajectory deviations in airborne SAR: analysis and compensation[J]., 1999, 35(3): 997-1009.
[3] Fornaro G, Franceschetti G, and Perna S. Motion compensation errors: effects on the accuracy of airborne SAR images[J]., 2005, 41(4): 1338-1352.
[4] 唐晓青. 机载干涉SAR运动误差影响建模与补偿方法研究[D]. [博士论文], 中国科学院电子学研究所, 2009: 20-59.
Tang Xiao-qing. Study on modeling and compensation for the influence of motion errors in airborne interfermetric SAR[D]. [Ph.D. dissertation], Institute of Electronics, Chinese Academy of Sciences, 2009: 20-59.
[5] Fornaro G and Sansosti E. Motion compensation in Scaled-FT SAR processing algorithms[C]. IEEE Conference on Geoscience and Remote Sensing Symposium, Hamburg, Germany, June 28-July 2, 1999, 3: 1755-1757.
[6] Moreira A and Huang Y. Airborne SAR processing of highly squinted data using a chirp scaling approach with integrated motion compensation[J]., 1994, 32(5): 1029-1040.
[7] Fornaro G and Franceschetti G. Image registration in interferometric SAR processing[J]., 1995, 142(6): 313-320.
[8] 韦立登. 机载双天线干涉合成孔径雷达计算机仿真系统设计、实现与应用研究[D]. [博士论文], 中国科学院电子学研究所, 2005: 101-126.
Wei Li-deng. Studies on designs, implementations and applications of computer simulation system for airborne dual-antenna interfermetric SAR[D]. [Ph.D. dissertation], Institute of Electronics, Chinese Academy of Sciences, 2005: 101-126.
[9] 孟大地, 丁赤飙. 一种方位向空变相位误差补偿算法[J]. 电子与信息学报, 2007, 29(10): 2375-2378.
Meng Da-di and Ding Chi-biao. A new approach to compensation spatially variant phase error in airborne wideband SAR[J].&, 2007, 29(10): 2375-2378.
[10] Zheng Xiao-shuang, Yu Wei-dong, and Li Zao-she. A novel algorithm for wide beam SAR motion compensation based on frequency division[C]. IEEE International Conference on Geoscience and Remote Sensing Symposium, Denver, CO, USA, July 31-Aug. 4, 2006: 3160-3163.
[11] Prats P, Reigber A, and Mallorqui J J. Topography- dependent motion compensation for repeat-pass inter- ferometric SAR systems[J]., 2005, 2(2): 206-210.
[12] Macedo K A C de and Scheiber R. Precise topography- and aperture-dependent motion compensation for sirborne SAR[J]., 2005, 2(2): 172-176.
[13] Prats P, Macedo K A C de, Scheiber R,.. Comparison of topography- and aperture-dependent motion compensation alogorithms for airborne SAR[J]., 2007, 4(3): 349-353.
[14] Fornaro G, Franceschetti G, and Perna S. On center-beam approximation in SAR motion compensation[J]., 2006, 3(2): 276-280.
[15] 林世斌, 李悦丽, 严少石, 等. 平地假设对合成孔径雷达时域算法成像质量的影响研究[J]. 雷达学报, 2012, 1(3): 309-313.
Lin Shi-bin, Li Yue-li, Yan Shao-shi,.. Study of effects of flat surface assumption to synthetic aperture radar time-domain algorithms imaging quality[J]., 2012, 1(3): 309-313.
[16] Scheiber R and Moreira A. Coregistration of interferometric SAR images using spectral diversity[J]., 2000, 38(5): 2179-2191.
[17] Prats P, Reigber A, Mallorqui J J,.. Efficient detection and correction of residual motion errors in airborne SAR interferometry[C]. IEEE International Conference on Geoscience and Remote Sensing Symposium, Anchorage, Alaska, USA, Sep. 2004: 992-995.
[18] Reigher A, Prats P, and Mallorqui J J. Refined estimation of time-varying baseline errors in airborne SAR inter- ferometry[J]., 2006, 3(1): 145-149.
[19] Prats P, Scheiber R, Reigber A,.. Estimation of the surface velocity field of the Aletsch glacier using multibaseline airborne SAR interferometry[J]., 2009, 47(2): 419-430.
[20] Macedo K A C de, Scheiber R, and Moreira A. An autofocus approach for residual motion errors with application to airborne repeat-pass SAR interferometry[J]., 2008, 46(10): 3151-3162.
[21] 郭智, 丁赤飚, 房建成, 等. 一种高分辨率机载SAR的运动补偿方案[J]. 电子与信息学报, 2004, 26(2): 174-180.
Guo Zhi, Ding Chi-biao, Fang Jian-cheng,.. A motion compensation system for high resolution airborne synthetic aperture radar[J].&, 2004, 26(2): 174-180.
[22] Di Filippo D J, Haslam G E, and Windall W S. Evaluation of a kalman filter for SAR motion compensation[C]. IEEE Position Location and Navigation Symposium, Orlando, FL, Nov. 29-Dec. 2, 1988: 259-268.
Performance Analysis of Flat Surface Assumption and Residual Motion Errors on Airborne Repeat-pass InSAR
Lin XueLi Fang-fangHu Dong-huiDing Chi-biao
(Key Laboratory of Technology in Geo-spatial Information Processing and Application System, Chinese Academy of Sciences, Beijing 100190, China)(Institute of Electronics, Chinese Academy of Sciences, Beijing 100190, China)(University of Chinese Academy of Sciences, Beijing 100049, China)
When applied to the airborne repeat-pass Interferometric Synthetic Aperture Radar (InSAR), which has a long synthetic aperture and large azimuth-dependent errors,the surface assumption used to simplify the time-domain algorithm model and the residual motion errors due to the precision of the navigation system affect the imaging result and the interferometric measurement. This paper analyzes the altitude errors introduced by the surface assumption and residual motion caused by the precision of the navigation system. The range errors model is deduced during the single pass, and the effect of these errors on the plane location, interferometric phase, and DEM precision is analyzed. Further, the accuracy of the theoretical deduction is verified by simulation and real data. Finally, this research provides theoretical basis for the system design and signal processing of the airborne repeat-pass InSAR.
Surface assumption; Residual motion errors; Repeat-pass; Interferometric Synthetic Aperture Radar (InSAR)
TN957.52
A
2095-283X(2013)03-0334-14
10.3724/SP.J.1300.2013.13013
2013-02-26收到,2013-05-14改回;2013-06-09网络优先出版
国家部委基金资助课题
林雪 linxue862002@163.com
林 雪(1986-),女,籍贯山东,在读博士生,研究方向为干涉SAR信号处理。
E-mail: linxue862002@163.com
李芳芳(1986-),女,籍贯山西,在读博士生;研究方向为干涉SAR信号处理。
E-mail: liff86@gmail.com
胡东辉(1970-),男,籍贯北京,副研究员,主要研究方向为SAR信号处理、SAR定标等。
E-mail: dhhu@mail.ie.ac.cn
丁赤飚(1969-),男,籍贯陕西,研究员,博士生导师,现任中国科学院电子学研究所副所长。主要从事合成孔径雷达、遥感信息处理和应用系统等领域的研究工作。
E-mail: cbding@mail.ie.ac.cn