基于边缘检测的雨刷片测试图像特征提取
2013-07-19姜义成吴桂华
姜义成,吴桂华
哈尔滨工业大学 电子与信息工程学院 电子工程系,哈尔滨 150001
基于边缘检测的雨刷片测试图像特征提取
姜义成,吴桂华
哈尔滨工业大学 电子与信息工程学院 电子工程系,哈尔滨 150001
1 引言
雨刷是汽车下雨或下雪行车时不可或缺的安全部件,对于安全驾驶有着重要的意义[1]。雨刷的作用在于能给驾驶员提供一个清晰的视野。随着汽车工业的发展和顾客消费能力的提升,汽车的产量快速增长,同时雨刷片的需求量迅速加大。汽车生产商选择性价比高的雨刷片,可以很好地提高整车质量并降低成本。然而对于如何有效地评判雨刷片质量,尽管国内外都有相关的测试平台,但是水痕的分布多是由人工观测得到,自动化程度不高。
现今图像边缘检测方法主要有微分算子技术和高通滤波[2]。本文结合现代数字图像处理的经典方法,利用Sobel算子和直线与圆弧的Hough变换,选择性地提取出图像中的有用边缘信息。图像的等级由雨刷片工作后水痕的半径与连续性联合决定,为评判雨刷片的质量提供可靠依据。
2 图像增强
在图像分析之前,要进行图像预处理。通常需要突出该图像中的某些信息,同时削弱或去除某些不需要的信息,使处理后的图像更适合特定的应用,这就是图像增强。增强后的图像质量得到改善,为后续处理提供可信度更高的输入资料。
2.1 图像灰度化
把含有亮度和色彩信息的彩色图像变换为灰度图像的过程称作灰度化。常用的灰度化方法有最大值法、平均值法和加权平均值法三种。加权平均值法根据重要性以及其他指标分别给R、G、B各分量赋予不同的权值。设它们各自对灰度的贡献分别为cr、cg、cb,则

其中系数cr、cg、cb≥0且满足cr+cg+cb=1。选择不同的权值将获得不同效果的灰度图像。大量实验表明,当cr= 0.299,cg=0.587,cb=0.114时,获得的灰度图最符合人眼视觉感受。
2.2 灰度二值化
灰度图像的灰度值为0~255。选择一个合适的灰度值t(0≤t≤255),将目标和部分背景噪声分开,称为图像的二值化,其中t为阈值。选择最佳阈值,凡是像素的灰度值大于t的设为1,小于t的设为0。这样处理后的图像就只有黑白两色,从而将灰度范围划分为目标和背景两类,实现了图像的二值化。确定阈值的算法分为全局阈值算法和局部阈值算法两类,本文选用全局阈值算法。
2.3 差影法去噪
差影法在动态监测与识别技术、血管造影技术及印刷线路板掩模缺陷的诊断等技术中都有应用[3],利用它可以检测同一场景中两幅图像间的差异。它实际上就是图像的相减运算,将同一背景下不同时期拍摄的图像相减得到差值图像。差值图像提供了图像间的差异信息,有效地消除了图像的背景。
测试图像f1(x,y)和背景图像f2(x,y)相减,得到图像中变化部分f(x,y)。图像减运算的表达式如下:

图1是两幅在不同时期获得的图像。将图1(b)作为背景,对图1(a)进行图像增强。经过灰度化和差影法去噪后的效果如图2所示,很好地抑制了背景噪声。图2中仍然存在的部分非目标信号可通过限定目标有效区域来去除。

图1 不同时期的图像
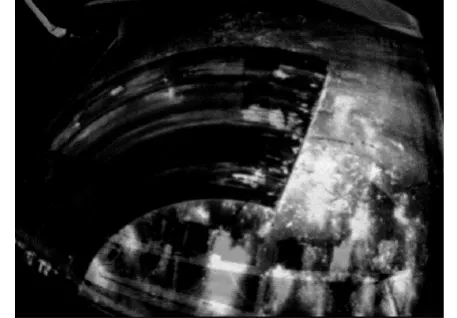
图2 预处理后的图像
3 边缘检测
3.1 Sobel算子
图像边缘是重要的视觉信息。边缘检测是图像处理、图像分析、模式识别、计算机视觉以及人类视觉的基本步骤[4]。边缘检测有很多方法,也是图像处理领域的研究重点。经典的算法中主要用梯度算子,常用的有Prewitt算子和Sobel算子,其中Sobel算子效果较好。
Sobel算子以滤波算子的形式提取边缘。X,Y方向各用一个模板,两个模板组合起来构成一个梯度算子。X方向模板对垂直边缘影响最大,Y方向模板对水平边缘影响最大。分别用水平算子和垂直算子对图像进行卷积,两卷积算子如下:

Sobel算子是先作加权平均,然后微分,最后求梯度[5]。
若二维图像的灰度值函数为f(x,y),定义Sobel算子如下:
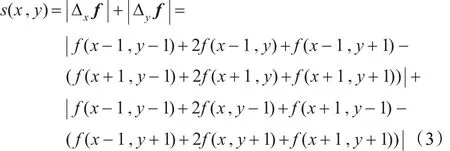
取适当门限Th,判断s(x,y)>Th,{s(x,y)}为边缘图像。Sobel算子不但能产生较好的边缘检测效果,而且受噪声影响也比较小,对噪声具有平滑作用,提供精确的边缘方向信息。
3.2 改进的Hough变换
Hough变换由Paul Hough于1962年提出,实现从图像空间到参数空间的映射[6]。它将图像空间中给定形状的线变换为参数空间中的一个点,从而将检测图像空间中线的问题转变为寻找参数空间中峰值的问题。经典的Hough变换算法可以有效地检测和提取圆弧,但由于圆有3个自由参数,需在三维参数空间中进行累积,使得计算量和内存需求量过大[7]。
本文中被检测圆弧的圆心位置是固定的,可以对经典Hough变换作相应的改进简化。分两步来检测圆弧,首先确定圆心参数,固定圆心位置,然后依据既定圆心检测圆弧。圆心位置由雨刷留下的直线痕迹来确定。
直线的坐标方程y=ax+b会遇到垂直线斜率无限大的情况,实际应用中不方便。考虑直线的极坐标方程:

式中,ρ为直线l到原点的距离;θ为直线l与x轴正方向的夹角。
图3给出直线的Hough变换。

图3 直线的Hough变换
图像空间x-y中的一个点映射为参数空间ρ-θ中的一条正弦曲线,反之,ρ-θ中的一个点映射为x-y中的一条直线。因此,直线l上不同的点映射为ρ-θ中一族相交于P点的正弦曲线。确定了P点,就实现了直线l的检测。
假设提取到两条直线l1和l2的参数分别为(ρ1,θ1)和(ρ2,θ2),根据式(4)有:

解出(x,y)即为圆心(a0,b0)。
圆弧检测中,经典的Hough变换需要对三个参数进行计算,即可以用三个参数a、b、r描述一个圆。已知x-y平面内圆的一般方程为:

把x-y中的圆转换到a-b-r参数空间,则x-y中任意一点对应于a-b-r中的一个三维锥面,如图4所示。x-y中同一圆上的点对应于a-b-r中的所有三维锥面必交于一点。
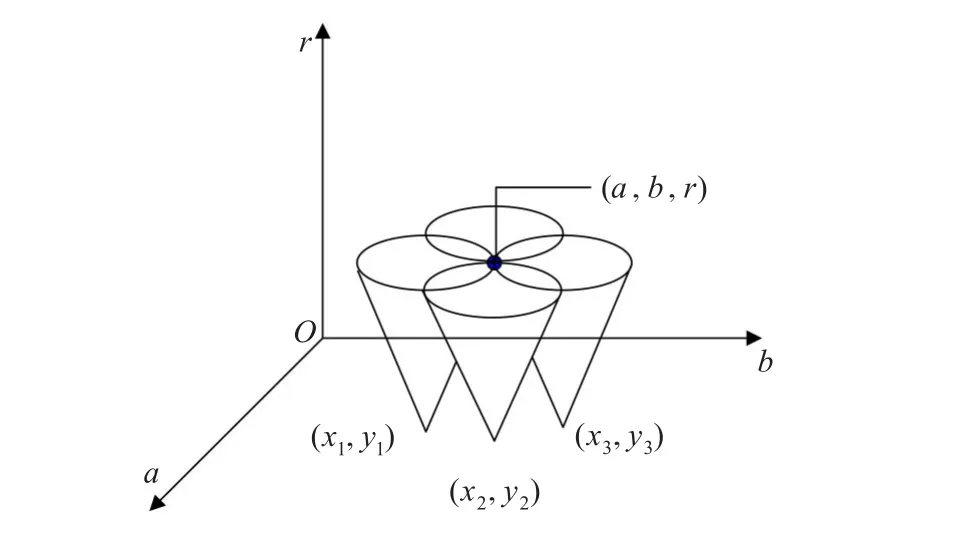
图4 圆弧Hough变换参数空间
但在该改进算法中,确定了圆心(a0,b0)后,三个参数就已经知道了两个,将三维运算降到一维运算。改进后的圆弧Hough变换如图5所示。
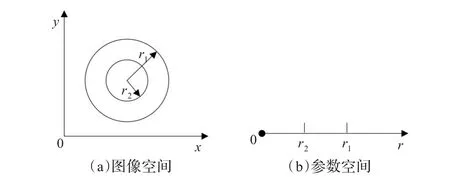
图5 改进后的圆弧Hough变换
x-y中的一点(x,y)对应a-b-r内的一点(a0,b0,r)。即满足方程:

因此在a-b-r内的变换为:


图6 圆弧Hough变换流程图
式中r即为所要求解的圆弧半径参数。
圆弧Hough变换软件编程流程如图6,直线的Hough变换流程类似。
图中imax为图像中像素为1的个数;Th为判决门限。
求解r的过程如下:
(1)提取图像中为1的像素,并统计出为1的像素总数imax;
(2)根据既得圆心位置和图像大小,确定半径的范围(rmin,rmax),并初始化累加器M(r);
(4)比较M(r)与门限Th值,找出累加器中所有值大于Th的单元所对应的r。
4 特征提取
在测试平台上,用数码相机拍摄雨刷工作一定次数后的车窗图像。加入可溶于水的白色粉末使痕迹更加明显,便于提取图像特征。如图7(a)所示,图像中最重要的几何元素近似为圆弧。图像大小为768×576。在提取圆弧之前,对图像进行预处理。图像中有用信息和背景对比明显,在直方图中像素灰度集中于两处,选取两峰值之间一点作为全局阈值,进行灰度二值化。
图像预处理后,首先确定圆心位置。Sobel算子边缘提取的结果如图7(b)所示。
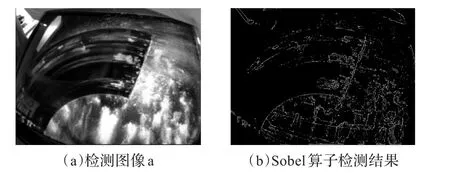
图7 Sobel算子边缘检测
利用直线的Hough变换,检测出图7(b)中沿着雨刷片方向的直线,如图8所示。其中角度参数θ取值范围为0°~180°,步长为1°,参数ρ步长为1。
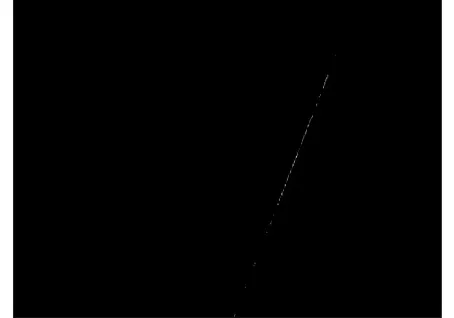
图8 直线检测结果a
同样地,由另一检测图像也可以检测出一条直线,如图9所示。两条直线合成到同一张图片上,如图10,由这两条相交直线就可以确定圆弧的圆心及相应的目标半径大小,实验所得圆心坐标为(652,364)。受车窗弧度曲率和雨刷臂宽度的影响,圆心的位置不可避免地会有一定的误差。圆心误差可以通过多次取样计算圆心位置平均值进行修正。圆心位置固定后,检测圆弧时,无需再确定圆心参数。
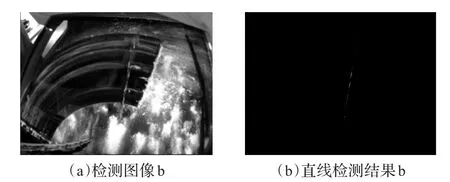
图9 直线检测
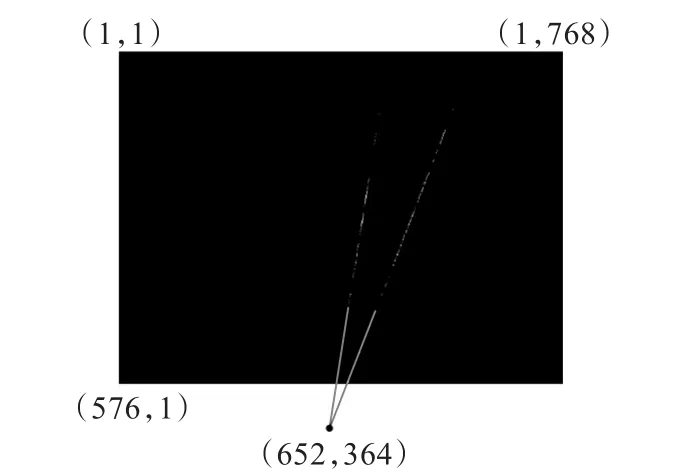
图10 两直线合成结果
利用已求得的半径范围和雨刷片摆动范围限定待检测圆弧所在位置,去除其他区域的多余信息。然后进行圆弧检测,按照图6流程,求解半径r,步长为15。图中需要检测的有用圆弧较多,根据多次检测经验,选取累加器中最大值的0.6倍作为门限值Th。圆弧检测结果如图11,图像中的圆弧信息被有效地检测提取出来,而边缘部分的非圆弧信息得到了抑制或消除。

图11 圆弧提取结果
实验在主频2.0 GHz,内存1.0 GB的计算机上进行,编程语言为Matlab7.0。图像大小为768×576。改进后的Hough变换在固定圆心的情况下和经典Hough变换平均运算时间如表1。

表1 改进的Hough变换和经典Hough变换算法比较
从表1中可以看出,在圆心固定的情况下,完成一次圆弧检测远小于经典Hough变换。圆心位置只需确定一次,与反复的圆弧检测相比,检测圆心位置的运算时间可以忽略。因此,改进后的Hough变换在保证检测质量的前提下,减少了运算时间,能够迅速完成检测任务,确保进行实时检测。
5 结束语
针对提取复杂背景中圆弧的困难,本文提出了一种改进的圆弧Hough变换,结合经典的Sobel算子边缘提取方法,解决了雨刷片质量测试中图像的边缘检测问题,实现了圆弧的有效提取。实验表明,经过这样的改进和简化,在保证检测精度的同时,很好地减少了运算时间。
[1]杨若凡.汽车雨刷器板簧热处理质量分析[J].材料热处理技术,2008,37(16):92-93.
[2]Gao Wenshuo,Yang Lei,Zhang Xiaoguang,et al.An Improved Sobel edge detection[C]//3rd IEEE International Conference on Computer Science and Information Τechnology(ICCSIΤ),Chengdu,2010:67-71.
[3]周彩霞,匡纲要,宋海娜,等.基于差影法粗分割与多模板匹配的人脸检测[J].计算机工程与技术,2004,25(10):1648-1650.
[4]袁春兰,熊宗龙,周雪花,等.基于Sobel算子的图像边缘检测研究[J].激光与红外,2009,39(1):85-87.
[5]吴术路.基于Sobel算子图像边缘检测的MAΤLAB实现[J].人工智能及识别技术,2010(19):5314-5315.
[6]Lingworth J,Kittler J.A survey of the Hough transform[J]. CVGIP,1988,44:87-116.
[7]尚璐,李锐,宋信玉.改进的Hough变换圆检测算法[J].电子设计工程,2011,19(14):168-171.
JIANG Yicheng,WU Guihua
Department of Electronic Engineering,School of Electronics Information Engineering,Harbin Institute of Τechnology,Harbin 150001,China
Sobel operator and Hough transform are two widely used edge detection techniques in modern image processing.In order to extract the circular arc effectively,an improved Hough transform is presented.After detecting edge with Sobel operator and Hough transform,circular arc information within the wiper blade test image is well extracted.Τhe result shows that calculate time is reduced.Meanwhile,measuring precision is kept as well.Τhese provide car manufacturers with a better basis to judge the quality of wiper blade.
wiper blade;Sobel operator;Hough transform;edge detection
在现代图像处理中,Sobel算子和Hough变换是两种应用广泛的图像边缘检测技术。运用经典的Sobel算子和改进的Hough变换,对雨刷片工作后的水痕图像进行边缘检测和分析,有效地提取出了图像中的圆弧信息。实验表明,改进的算法在保证了检测精度的同时,减少了运算时间,为汽车生产商提供了评判雨刷片质量的依据。
雨刷片;Sobel算子;Hough变换;边缘检测
A
ΤN911.73
10.3778/j.issn.1002-8331.1111-0445
JIANG Yicheng,WU Guihua.Extracting feature of wiper blade test image based on edge detection.Computer Engineering and Applications,2013,49(15):184-187.
姜义成(1964—),男,教授,博导,主要研究领域为信号检测与目标识别技术,高分辨雷达成像与信息处理技术,光电图像处理技术;吴桂华,男,硕士研究生。E-mail:iamwuguihua@gmail.com
2011-11-24
2012-04-16
1002-8331(2013)15-0184-04
