低地板车辆限界计算研究
2013-07-13张明阳冯遵委
■ 张明阳 冯遵委
张明阳:南车南京浦镇车辆有限公司,工程师,江苏 南京,210031
冯遵委:南车南京浦镇车辆有限公司,高级工程师,江苏南京,210031
低地板有轨电车属于中等运量交通工具,可填补公共汽车与地铁运量间的空白,特别适合用作中小城市的干线交通和大城市的支线交通,且现代低地板有轨电车具有方便快捷、安全舒适、节能环保、投资费用低、建设周期短、与城市环境适应性强等优点,是名副其实的“绿色”交通工具[1-3]。因此,低地板车辆迅速吸引了国内各大城市的关注和研究,并逐渐开始兴起。
国内各科研院所和车辆企业虽然也进行过低地板车辆的研究论证和设计制造工作,但总体来看,低地板车辆在国内的研究和应用仍处于起步阶段,并未形成一整套比较成熟的标准体系和技术规范[4]。
限界技术是轨道交通工程中的关键技术之一,关系工程的规模、投资及建成后运行的安全问题。由于低地板车辆结构型式及运行方式的多样化,其限界有别于地铁系统,不能直接采用地铁车辆限界。低地板车辆限界不仅是车辆设计过程中一项重要内容,也是行车安全的重要保障,是确定沿线设备及建筑限界的基础,因此有必要对其进行研究。
1 计算方法选择
车辆限界是车辆能否在线路上使用的一个决定性因素,但目前国内尚无低地板有轨电车相应的设计规范和限界标准来规范车辆的运行及沿线设备的安装。
关于车辆动态限界的计算,现在国外可供参考的标准为跨国铁路运输标准UIC 505和德国BOStrab限界暂行规范(简称BOStrab规范),国内可供参考的标准为地铁限界标准CJJ 96—2003。
UIC 505标准主要针对UIC各成员国地面铁路的实际情况而制定,直接应用于地铁和低地板有轨电车系统都是不适宜的。我国地铁限界标准CJJ 96—2003是针对“标准车辆”(A型、B1型、B2型),对各型车车辆的长度、宽度、高度、定距、转向架轴距等都有规定,各车辆均为每车2个转向架的常规车辆且长度均匀(司机室车体允许适当加长,但应削形处理)。低地板车辆的情况复杂,特别是100%低地板车辆。首先,低地板车辆结构型式多种多样,有单车、浮车,铰接型和单、浮车组合型等[5]。其次,运行方式也灵活多样,在城市中心,低地板列车可以选择专有路权和共用路权;在城市近郊区,可在既有铁路线上行驶。另外,运行的线路环境也比较复杂,低地板车辆通过的曲线半径要比其他轨道车辆小得多,由于街道的限制,一般不设缓和曲线,也没有曲线超高。这些都与传统的机车车辆或地铁轻轨车辆完全不同[6]。因此,低地板车辆直接采用CJJ 96—2003地铁限界标准也是不适宜的。BOStrab规范主要用于有轨电车或轻轨系统,其计算方法科学可靠,而且可适用于不同的车辆结构和运行环境。参考BOStrab规范,根据低地板车辆的具体结构和运行情况提出合理的计算方法,并对低地板车辆限界计算的关键项点进行研讨和阐述。
2 计算车辆的特点
研究的车辆为庞巴迪公司技术转让的FLEXITY2 100%低地板有轨电车(见图1),是由多个模块构成的铰接车辆,根据运量需求,可由5模块构成(约30 m)或7模块构成(约40 m)。
鉴于此种100%低地板车辆的编组长度不影响车辆限界,5模块车辆和7模块车辆的限界并无差别,因此研讨主要基于5模块车辆。
图1 FLEXITY2 100%低地板有轨电车
100%低地板车辆采用了新型的浮车结构型式。下方没有转向架支承,而是通过铰接装置“挂”在与其相邻的车体上[4]。5模块低地板车辆编组见图2。1车、5车为司机室模块(带动车转向架);3车为转向架模块(带受电弓拖车),采用短车体,转向架布置在车体中部;2车、4车为客室模块(浮车),采用长车体,其下部没有转向架支承,靠铰接装置与邻近的车体相连接,车辆各模块通过铰接连接。车辆技术数据见表1。
3 车辆限界计算
低地板车辆不同于我国地铁的“标准车辆”,因此其限界的计算也不能只提供直线上的动态包络线计算结果( 车辆限界),而应提供各典型曲线半径下的车辆动态包络线计算结果。BOStrab规范中的动态包络线计算公式可直接计算出车辆在各种曲线地段(包括直线地段)运行的动态包络线,在计算得到的需要限界与实际限界之间保留一定的安全间距,即相当于CJJ 96—2003标准中车辆限界和设备限界的概念[7]。
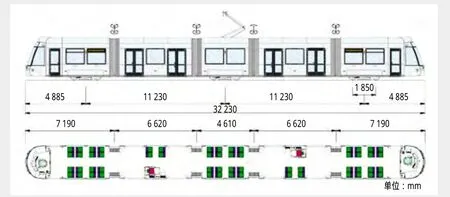
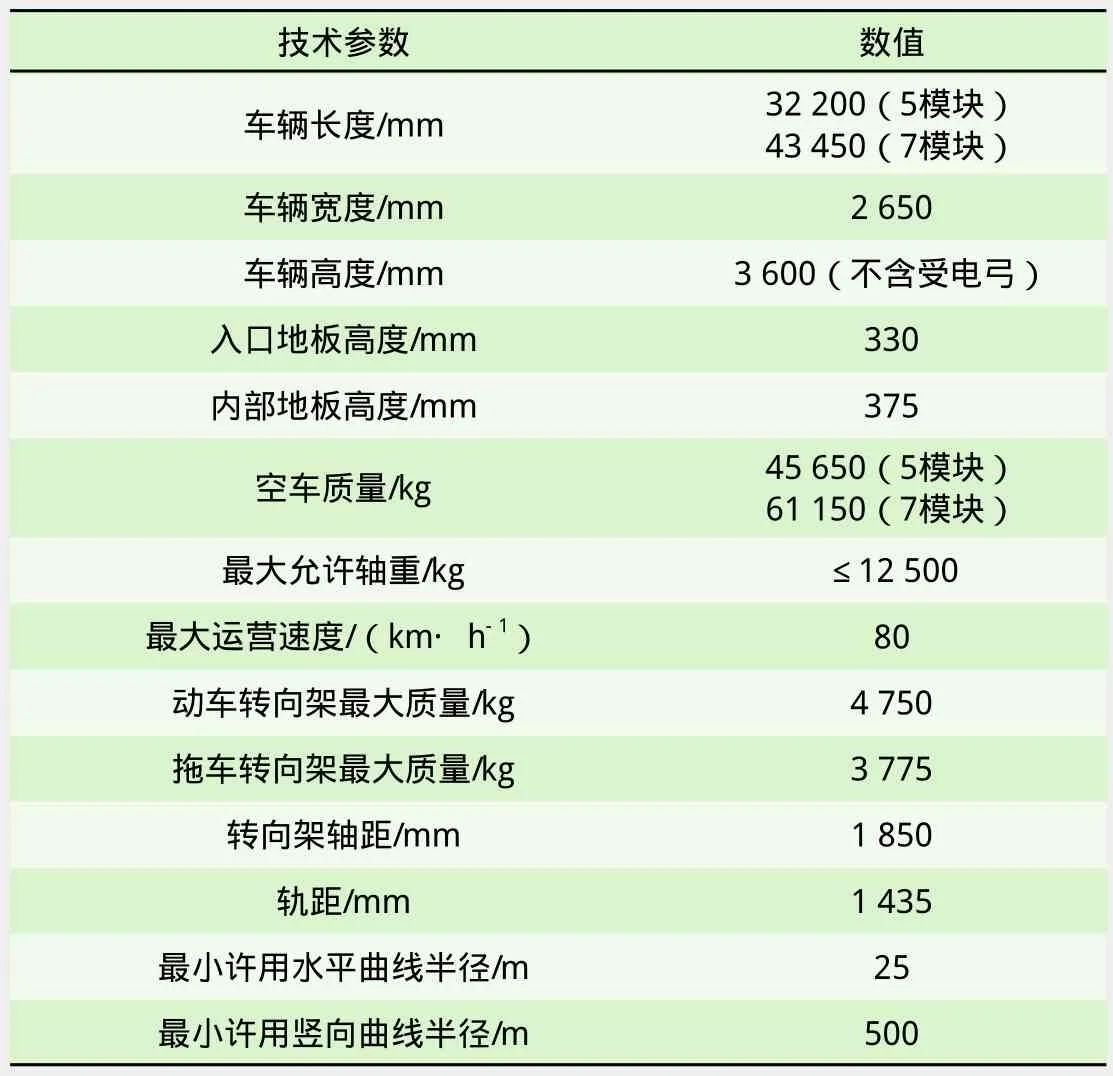
表1 车辆技术参数
3.1 计算需考虑的因素
运行在曲线轨道或平直轨道上的车辆,其最大偏移量由以下3部分构成[8]:
(1)车辆的静态偏移量。基本取决于车辆的几何尺寸和轨道的曲线半径。静态偏移量不包括车辆由于轮轨间隙而导致的位移,也不包括车辆的任何动态偏移,如由于弹簧弹性变形、侧滚运动等导致的动态偏移。
(2)必须考虑附加因素(非随机因素),因为这些数值可能在相同的方向同时发生,如由于轮轨间隙导致的位移、车辆运营中因载荷作用由弹簧横向或垂向弹性变形而产生的位移等。
(3)作为随机结果需考虑的附加因素(随机因素)。在考虑这些因素时,可以假定这些因素不会在相同方向上同时发生,如车辆和轨道的各种公差、轨道的横向位移等。
根据BOStrab规范规定的运算法则,对上述3部分进行概括,即可得出车辆最外突出点的最大偏移值。该偏移值反映了车辆的动态位移,并包含车辆载荷、侧风力、轨道不平顺和源自轨道导向力的横向冲击等附加因素。
3.2 计算输入
BOStrab规范既考虑车辆特性,也考虑和基建相关的参数。这些参数可归类如下:(1)车辆特性参数,如车辆的几何尺寸和布局、弹簧的特性、车体的横向和转动位移、公差等。这些参数由车辆制造商定义。(2)轨道参数,如轨道几何尺寸的公差和偏差。这些参数来自轨道/基建运营商。轨道参数还需对嵌入式轨道和道砟轨道进行区分。(3)取决于运行环境的参数,如风速、车辆速度等。
3.3 最大需要限界计算
BOStrab规范横向需要限界计算方式见公式(1)。
式中:ba/bi——包括车体半宽在内的由于曲线引起的几何凸出量;
YSS——由轮轨间隙引起的车辆某点的横向位移;
YSA——轮轴轴承的横向间隙;
YSD——转动中心(座/销)的横向间隙;
YFR——轮箍横向弹性变形量;
YFP——一系弹簧横向弹性变形量;
YFS——二系弹簧静态变形量;
YGE——钢轨横向弹性变形量;
YWQ——离心力或下滑力所引起的横向偏移量;
YWZ——载荷不对称引起的偏移量;
YHE——左右两条钢轨相对高度方向的弹性偏差量;
YSW——由轨道磨损中心线偏斜引起的车辆某点的横向偏移量;
YTR——轮对制造误差;
YTA——轮轴轴承制造误差;
YTD——转向中心(座/销)的制造误差;
YTP——一系弹簧制造误差;
YTW——车厢半宽制造误差;
YDS——二系弹簧动态变形量;
YGW——轨道位移偏斜量;
YGV——轨道位移;
YWW——风力引起的横向偏移;
YWS——侧向冲击车引起的横向偏移;
YWB——车辆半宽上的车厢装配误差;
YHS——左右两条钢轨的高差。
应注意,由于计算车辆结构的特殊性,其铰接点和转向架中心并不重合,其曲线几何偏移见图3。
包括车体半宽在内的由于曲线而引起的几何凸出量应按式(2)和式(3)进行计算。式中:r——线路平面曲线半径;
a ——车辆定距(两铰接中心之间的距离);
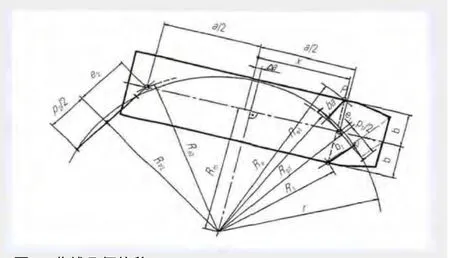
图3 曲线几何偏移
p——转向架轴距(P1第一个转向架,P2第二个转向架);
e——铰接中心至转向架轴距中心的距离(e1第一个铰接中心至第一个转向架轴距中心的距离,e2第二个铰接中心至第二个转向架轴距中心的距离);
b——车辆上某点到车辆中心线的横向水平距离;
x——计算点至车辆定距中心的距离。
BOStrab规范竖向需要限界计算见公式(4)、公式(5)。
式中:ZPU——车辆地板下某点竖向下移需要的限界;
ZPO——车辆顶部某点竖向上移需要的限界;
ZKU/ ZWA——上凸竖曲线或下凹竖曲线的凸出量;
ZVR——车轮踏面不可补偿的磨损量;
ZFR——车箍弹性变形量;
ZFP——一系弹簧静态变形量,包括残余的弹簧位置校正误差;
ZFS——二系弹簧静态变形量,包括残余的弹簧位置校正误差;
ZFW——车厢纵向翘曲;
ZGE——轨道竖向弹性变形量;
ZVS——钢轨竖向磨损量;
ZWA——由离心力或下滑力引起的竖向偏移;
ZWZ——载荷不对称引起的竖向偏移;
ZHE——两边钢轨弹性高差引起的竖向偏移;
ZTW——车厢地板面高度误差容限;
ZTG——车顶/车底及安装在其上的设备安装高度误差;
ZDP——一系弹簧动态变形量;
ZDS——二系弹性动态变形量;
ZGV——轨道竖向位移;
ZWS——由横向冲击车引起的偏移;
ZWW——由风力引起的偏移;
ZWB——车辆半宽上的车厢装配误差引起的竖向偏移;
ZHS——由两边钢轨安装高差引起的竖向偏移;
ZNG——由轨道竖向位移造成起伏运动所引起的竖向偏移。
还应注意,由于BOStrab规范发布时间较早,当时轨道车辆采用抗侧滚扭杆装置还不多见,因此未考虑抗侧滚扭杆装置的作用。有研究表明,抗侧滚扭杆装置不仅可以提高车辆的动力学性能,同时还能大大减少车体横向侧滚位移,缩小车辆动态包络线,进而减小设备限界及建筑限界,减少隧道施工投资[9]。此100%低地板车辆配置中,抗侧滚扭杆装置虽为可选设备(对整车动力学性能无显著影响),但为适应限界,一般均装配抗侧滚扭杆装置,因此在计算整车二系侧滚刚度时必须考虑抗侧滚扭杆装置的作用。
3.4 关键点确定
由于车辆结构的特殊性,计算需求限界时,首先应将司机室模块、客室模块及转向架模块作为一个计算车辆单元进行计算,同时还应将加长司机室模块作为一个单独计算车辆单元进行计算,最后综合比较计算最大需求限界。
低地板车辆限界计算时关键点的选取十分重要,关系到限界计算的正确性及准确性。
由于100%低地板车辆结构原因,其进入曲线轨道时(曲线入口)的内侧位移要比通过持续半径曲线时的内侧位移更为严重。最恶劣的情形是,当第1个浮车模块(客室模块)和第2个转向架模块之间的贯通处正好处于直线和曲线轨道过渡处,而不设过渡曲线(见图4)。
根据图4,为确定浮车型低地板车辆进入曲线时内侧位移关键截面所处的位置,设关键截面偏离客室模块中心a/2处的距离为x(假设向前进方向偏离为正),客室模块前铰接中心距司机室模块转向架中心的距离为e,根据图4可得出如下关系式:
由此可知,此关键截面所处的位置与曲线半径无关,只与车辆本身的结构情况相关,负值表明关键截面向前进方向的反方向偏离。
因此,计算关键点的选取除应考虑车辆端部及中部的突出关键点外,还应增加进入曲线时车辆关键截面处的关键点。
为计算低地板车辆的需求限界,特选关键点见表2、表3。车辆上关键点的位置标示见图5、图6。
4 计算结果
此处仅提供嵌入式轨道上车辆的横向动态位移计算结果,即横向限界需求量。在计算结果中,对进入“曲线入口”及通过“持续曲线”的情况均进行了阐述。
表4总结了车辆在嵌入式轨道上的动态位移计算结果。对于曲线外侧位移,司机室轮廓上的点或后视摄像头是关键点;而对于曲线内侧位移,客室模块中心区域的点是关键点。对于大半径曲线,由于前部加长的原因,司机室轮廓上的点或后视摄像头也变为关键点。
表4仅提供了各半径曲线上运行车辆最突出关键点的动态位移。只需对车辆各关键截面上所有轮廓点进行计算,即可得出各半径曲线上的车辆动态包络线,但计算所有半径曲线上的车辆动态包络线工作量十分巨大。因此,一般只计算出直线上的车辆动态包络线,即可知其直线需求限界,然后计算出车辆在各不同半径曲线上关键点动态位移和在直线轨道上动态位移之间的差值,曲线限界在直线限界基础上相应加宽即可。
图4 车辆进入曲线示意
表2 司机室模块关键点信息 mm
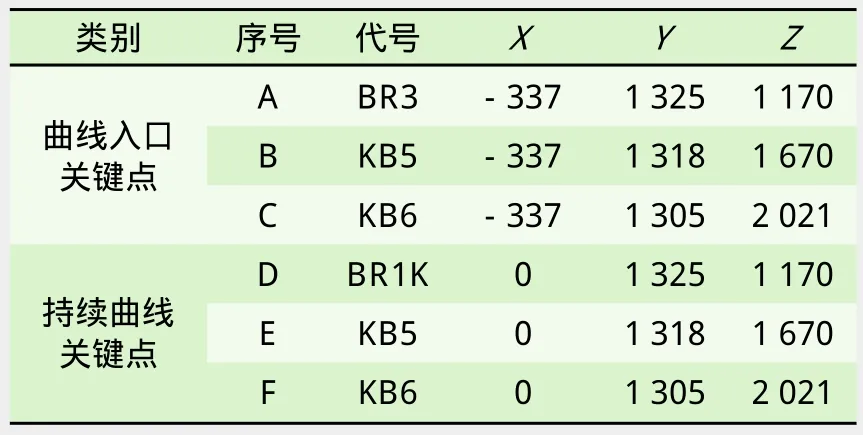
表3 客室模块关键点信息 mm
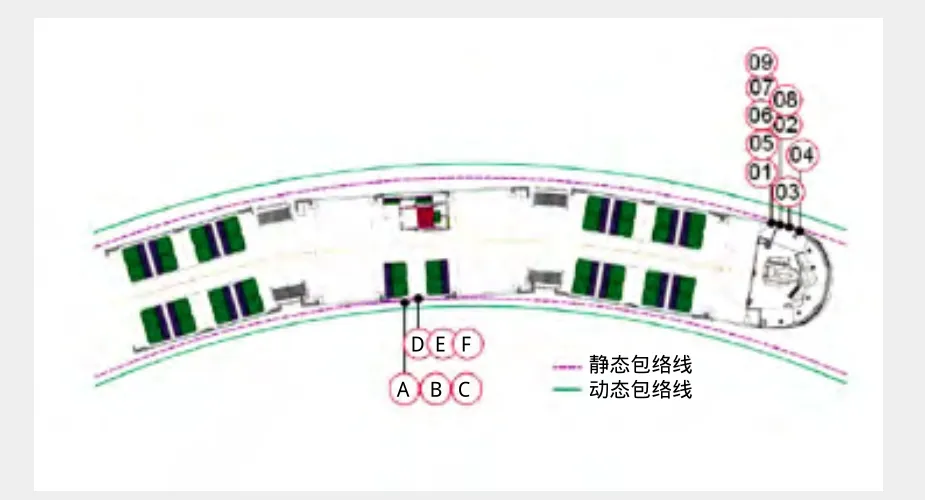
图5 车辆上关键点的位置(俯视图)

图6 车辆上关键点的位置(前视图)

表4 车辆在嵌入式轨道上的动态位移
曲线内侧和外侧的限界加宽最小需求量见表5。由于道砟轨道和嵌入式轨道边界条件所带来的曲线限界加宽区别不大,因此只需提供一种情况下的限界加宽需求数值即可。如前面所述,在进入曲线区域时的内侧位移量比通过持续半径曲线时更为关键。基于这个原因,表5既说明了进入曲线区域时的限界加宽情况,同时也说明了通过持续半径曲线时的限界加宽情况。需要注意的是,在曲线半径为80~200 m范围内的限界加宽不是由于车辆性能而是由于轨距加宽、轮轨磨耗等边界条件所引起的。
5 结论
车辆动态限界计算不仅是车辆设计过程中一项重要内容,也是安全行车的重要保障。采用科学的车辆限界计算方法对100%低地板车辆的限界计算进行探讨,并对其中几个应注意的关键问题进行阐述。
(1)低地板车辆结构有别于常规地铁车辆,车辆在曲线上的几何偏移不可按CJJ 96—2003地铁限界标准中的计算公式进行计算,而应参考BOStrab规范,按本文所列计算公式进行计算。
(2)抗侧滚扭杆装置可显著减小车辆的动态包络线,因此为适应限界,低地板车辆一般均装配有抗侧滚扭杆装置,在进行低地板车辆限界计算时必须考虑抗侧滚扭杆装置的作用。
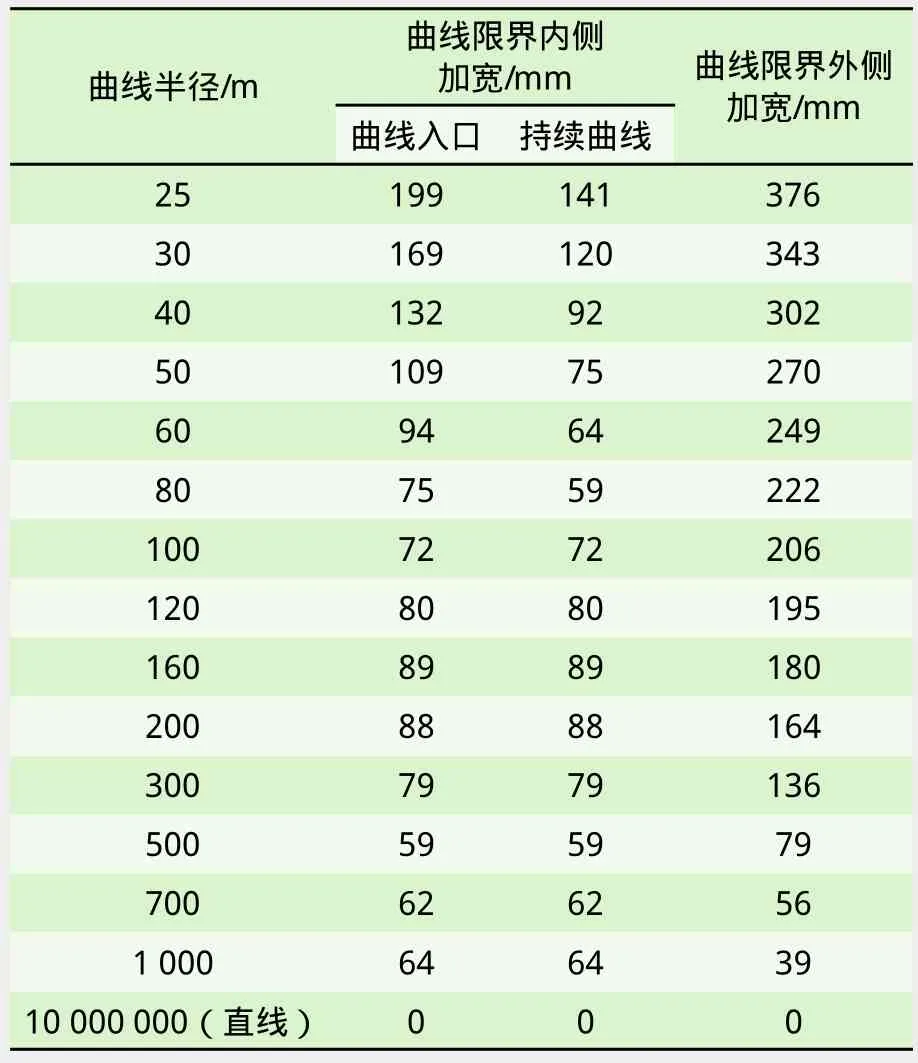
表5 嵌入式轨道限界加宽需求量
(3)由于低地板车辆结构的特殊性,计算需求限界时,不可只计算单一车辆模块,而应灵活选择计算车辆单元,综合比较计算最大需求限界。
(4)低地板车辆限界计算时关键点的选取十分重要,其关系到限界计算的正确性及准确性。计算关键点的选择除应考虑车辆端部及中部的突出关键点外,还应考虑进入曲线时关键点的选择。
(5)低地板车辆限界计算校核时,不能只考虑直线地段的情况,还应校核曲线地段的限界加宽量是否满足限界加宽最小需求。
[1]薛美根,杨立峰,程杰. 现代有轨电车主要特征与国内外发展研究[J]. 城市交通,2008(6):88-91,96.
[2]赵大斌,任利惠. 70%低地板轻轨车辆的型式比较[J].城市轨道交通研究,2007(4):29-33.
[3]赵明花,牛锡平,杨丹燕,等. 我国自主研发100%低地板轻轨车[J]. 机车电传动,2013(3):59-63.
[4]葛党朝. 低地板轻轨车辆的总体方案研究[J]. 城市轨道交通研究,2011(9):58-61.
[5]王欢,戴焕云. 低地板轻轨车辆的技术分析与自主研发选型[J]. 中国铁路,2009(10):56-59.
[6]罗世辉. 大连低地板有轨电车的动力学性能[J]. 机车电传动,2001,5(3):28-31.
[7]倪昌. 我国与德国限界标准的异同和特点[J]. 都市快轨交通,2005,4(2):15-20.
[8]德国城市轨道交通技术法规,城市轨道交通建设和运营规则:细则8:BOStrab限界暂行规范[S],1996.
[9]陈中杰. 地铁限界问题探讨[J]. 电力机车与城轨车辆,2007,11(6):49-54.
