遮蔽条件下的光伏阵列最大功率点跟踪算法
2013-07-05朱志宇原琳陈迅
朱志宇,原琳,陈迅
(江苏科技大学电子信息学院,镇江 212003)
遮蔽条件下的光伏阵列最大功率点跟踪算法
朱志宇,原琳,陈迅
(江苏科技大学电子信息学院,镇江 212003)
针对光伏发电系统在部分遮挡情况下所具有的高度非线性、时变不确定性和多个局部峰值等特点,研究了一种基于改进人工鱼群算法的最大功率点跟踪方法。此方法将人工鱼群算法与扰动观察法相结合,把最大功率点的搜索和跟踪分开进行,充分考虑到两者的相关性和独立性,有效地提高了光伏发电系统的发电效率。通过Matlab仿真实验表明:无论光伏阵列是否存在遮蔽现象,本算法均具有良好的最大功率点搜索和跟踪效果,避免了局部极值点的影响。
最大功率点跟踪;人工鱼群算法;光伏阵列;部分遮挡
煤荒、电荒的出现及所倡导的低碳生活使得光伏发电受到人们的青睐。光伏发电与火力发电相比,有着能源清洁可再生,无动作部件,无噪声等无可比拟的优势。
为提高光伏阵列输出效率,尽可能高效地利用太阳能,目前许多研究者针对光伏阵列电压电流输出曲线非线性的特点提出了多种最大功率点跟踪(MPPT)方法。如文献[1-10]介绍的扰动观察法(P&O)、电导增量法、间歇扫描跟踪法等,以及这些传统方法的优化改进算法。但这些方法主要是针对光伏阵列在无遮蔽、理想光照条件下的最大功率点跟踪。光伏发电系统实际应用中往往存在乌云、树荫、建筑物等物体的遮挡而产生遮蔽效应。以上方法在遮蔽情况下无法表现出优异的最大功率点跟踪效果。文献[11-12]提出的模糊免疫算法、粒子群优化算法PSO(particle swarm optimization)虽也针对部分遮挡情况下的光伏阵列最大功率点跟踪,但模糊免疫算法控制复杂,粒子群优化算法易陷入局部极值,优化精度较差,在进化后期收敛慢,粒子趋于同一化,失去多样性[13]。
本文提出一种基于改进的人工鱼群IAFSA (improved artificial fish swarm algorithm)最大功率点搜索跟踪算法,即将人工鱼群算法与扰动观察法相结合的最大功率点跟踪方法,可实现对光伏阵列部分遮挡时的最大功率点跟踪。人工鱼群算法是文献[14]于2002年提出的一种自下而上、基于行为的人工智能跟踪算法,具有结构简单、搜索速度快、搜索范围广的显著特点,并且该算法对初值、参数选择不敏感、鲁棒性较强、简单易实现。人工鱼群算法仿照鱼在水中的游弋行为,具体包括人工鱼的觅食、聚群、追尾和随机游走等行为。
改进的人工鱼群算法首先利用人工鱼群算法快速地搜索全局最大功率点,避免陷入局部极值,然后由扰动观察法实时跟踪系统的最大功率点。跟踪过程中根据当前光伏阵列输出功率的变化情况决定是否重新进行最大功率点的搜索。此方法将最大功率点的搜索和跟踪分开进行,充分考虑到两者的相关性和独立性,有效提高了光伏发电系统的发电效率。
1 光伏阵列等效模型及输出特性
本文假设光伏阵列由三个光伏组件串联构成,如图1。光伏阵列部分被遮挡即光照不均匀,各部分的入射光照强度分别为1 kW/m2、0.5 kW/m2、0.2 kW/m2,Iph1、Iph2、Iph3为以上对应的光照强度下的光生电流。
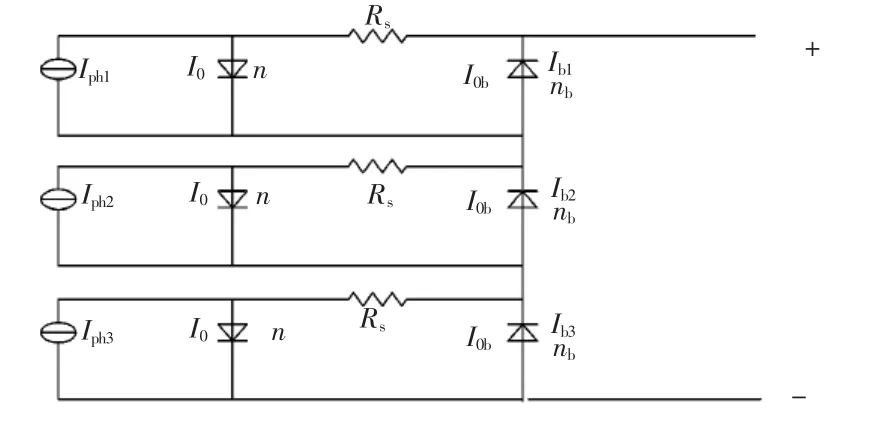
图1 带有旁路二极管的光伏电池组件模型Fig.1PV model with bypass diode
根据光生电流值正比于入射光的光照强度知Iph1〉Iph2〉Iph3,由文献[15]得此时光伏阵列的电压-电流关系式为
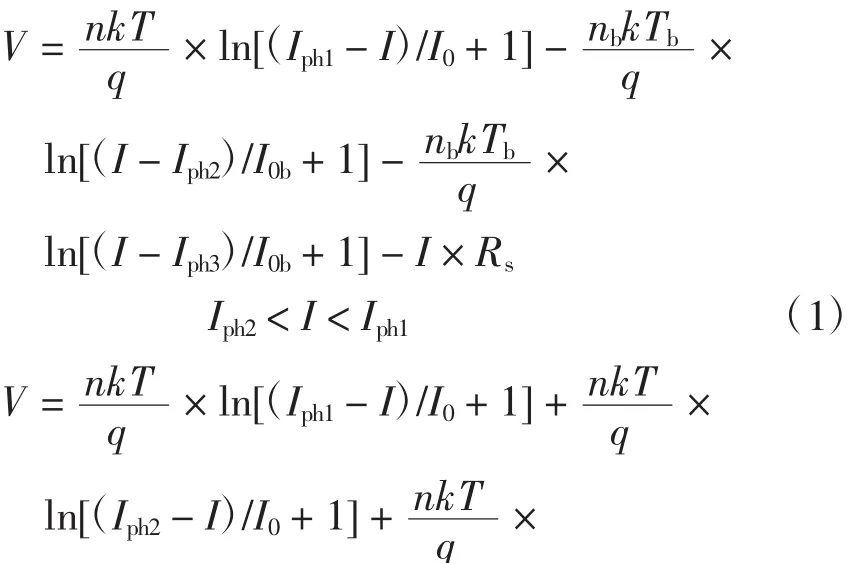
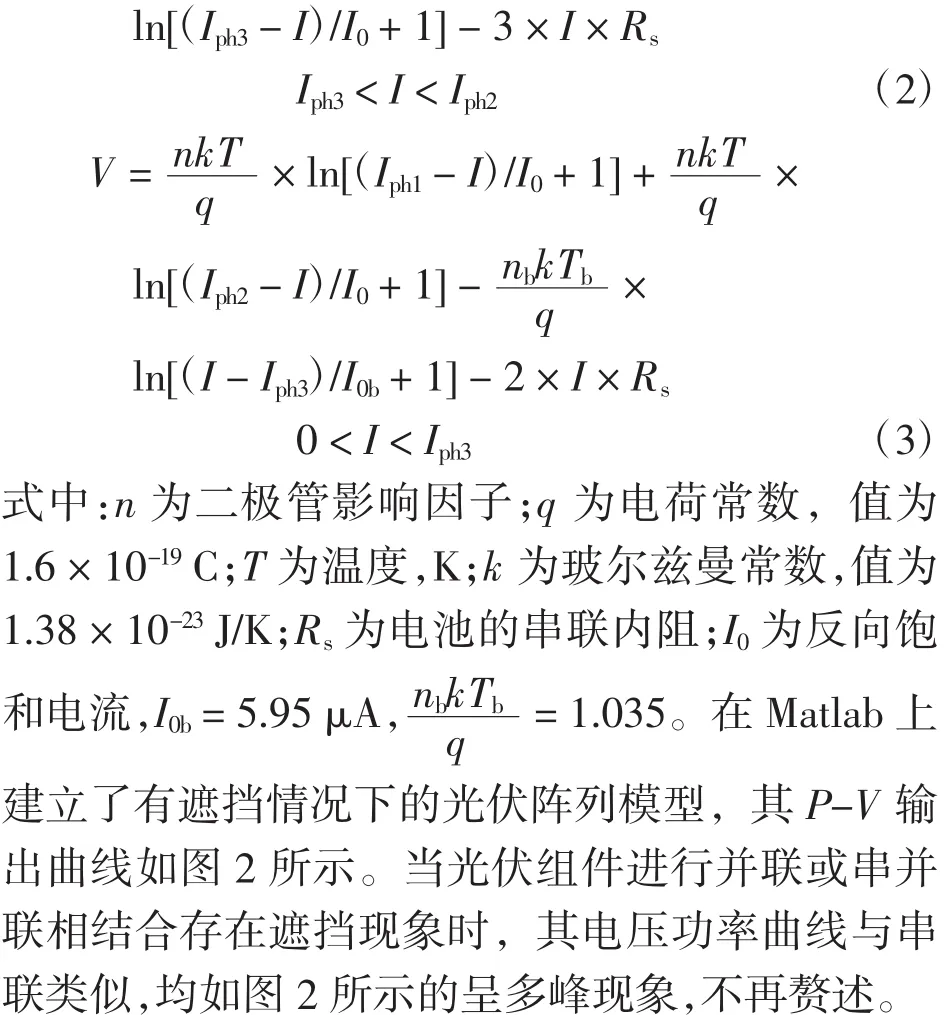

图2 光伏阵列部分遮挡时P-V曲线Fig.2PV array configuration under partial shading
2 人工鱼群算法与扰动观察法相结合的MPPT方法
最大功率点跟踪即寻求光伏阵列输出功率最大化的过程。当光伏阵列被部分遮挡时其P-V曲线呈多峰特性,与无遮挡时的单峰特性不同。若采用扰动观察法,假设初始状态为图2中的a点,增加扰动量后到达b点,此时a点功率Pa小于b点功率Pb,则继续按原方向扰动,到达c点,此时Pb〉Pc,则按反方向扰动,通过不断改变扰动量而使输出功率在Pa、Pb之间来回震荡而没有跟踪到实际的最大功率点。电导增量法求曲线最大值的过程即求dP/dV=0的过程。当光伏阵列被部分遮挡时其P-V曲线呈多峰,因此存在多个dP/dV=0的极值点。以上分析可知传统的最大功率点跟踪方法易使光伏阵列输出功率陷入局部极值点而不易跟踪到全局最大功率点。采用改进的人工鱼群算法对光伏阵列被部分遮挡情况进行最大功率点搜索和跟踪,系统结构如图3。
图3 MPPT控制电路结构图Fig.3Sketch map of MPPT circuit control
图4为基于改进人工鱼群的最大功率点搜索跟踪算法系统控制流程图。

图4 基于改进人工鱼群的最大功率点搜索跟踪算法Fig.4MPPT based on the IAFSA
基于IAFSA光伏阵列被部分遮挡情况下的最大功率点跟踪步骤如下。
1)初始化鱼群:初始化鱼群规模数,以脉宽调制PWM(pulse width modulation)的占空比值作为人工鱼群个体。
2)迭代计数器n清零。
3)评价所有个体,选对应的输出功率最大的占空比及此时的最大功率值记录到公告板。
4)执行人工鱼群的觅食行为:设当前占空比为Di,在其感知范围Visual内任取占空比Dj如公式(4),若Pi〈Pj则向Dj方向移动一步如公式(5),反之重新选取随机占空比如公式(4),执行完规定的选择次数后,若仍不满足前进条件则随机移动一步如公式(6),公式中的rand表示0到1之间的随机数,step为移动步长。

5)执行人工鱼群的聚群行为:用人工鱼的当前状态Di表示当前的占空比值,当di,j〈Visual时执行公式(7)~(9),如果Pc/nf〉δ×Pi,表明伙伴中心有较多的食物并且不太拥挤,则朝伙伴的中心位置方向前进一步,如公式(10),否则执行步骤4,Dc为探索当前邻域内即di,j〈Visual的中心位置,即要得到的下一个及后续占空比值,di,j为两人工鱼之间的距离如公式(11),其中nf为探索当前邻域内的伙伴个数,δ为拥挤度因子,δ=1/(α×nmax)。

6)执行人工鱼群的追尾行为:当前占空比为Di,探索当前邻域内的伙伴中在Dj取得最大功率,如果Pj/nf〉δ×Pi,表明伙伴Dj的状态具有较高的食物浓度并且其周围不太拥挤,则朝伙伴Dj的方向前进一步,如公式(12),否则执行步骤4。

7)比较Dsnext,Dfnext的大小,取较大值更新公告板记录,迭代计数器n加1。
8)判断是否达到设定的迭代次数,若达到则进入步骤9,否则返回到步骤3继续完成迭代寻优计算。
9)当搜寻到全局最大功率点后,采用传统的扰动观察法进行全局最大功率点的跟踪:以较小的固定步长在最大功率点左右各进行扰动观察,左、右扰动后的功率值分别与前一次相应的扰动后的功率值比较,若偏差较大,说明外界环境条件改变使得光伏阵列输出的最大功率点发生了改变,则返回步骤2重新进行最大功率点搜索,否则继续执行步骤9。
3 仿真实验
为了验证所提方法的有效性,在Matlab软件中对改进方法进行了仿真。光伏阵列模型仿真参数按照实验室已有的光伏电池进行选择,开路电压为33.4 V,短路电流8.44 A。
3.1 光照均匀条件下IAFSA与P&O最大功率点跟踪效果比较
光伏阵列受光照强度均匀,光强为1 kW/m2,环境温度为25℃。分别采用IAFSA与P&O对已建立的光伏组件模型进行最大功率点跟踪。IAFSA中视野范围取值为3,步长为1.2,拥挤度因子取值为0.11,人工鱼种群数为30,迭代次数取5,扰动步长取0.01。P&O中扰动步长取0.01。两种方法对光伏阵列的最大功率点跟踪效果如图5。
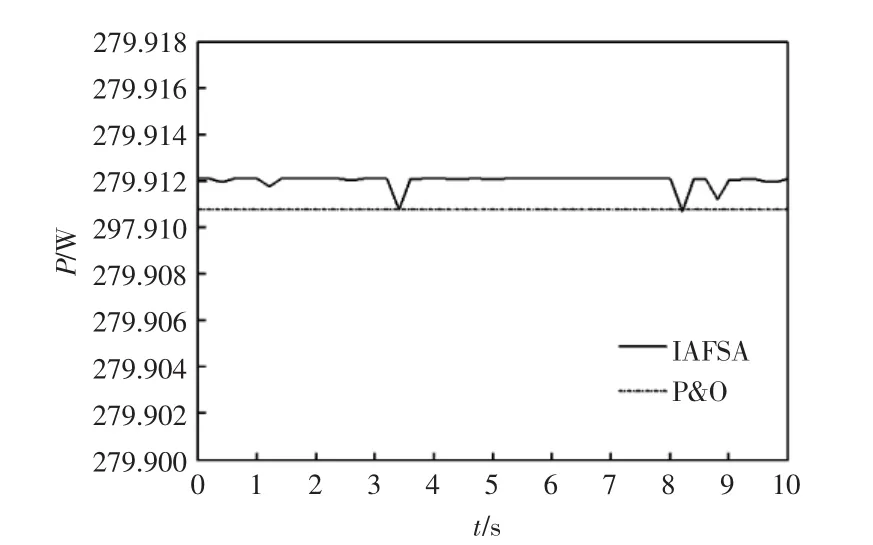
图5 光照均匀条件下IAFSA与P&O最大功率点跟踪Fig.5MPPT of IAFSA and P&O under total illumination
由图5知,在光照强度均匀的情况下,IAFSA 与P&O均能跟踪到光伏阵列的最大功率点,并且采用IAFSA方法搜索及跟踪到的最大功率点大于单独采用P&O方法跟踪到的最大功率点,因此在光照均匀情况下IAFSA与P&O相比,提高了最大功率点跟踪的效率。
3.2 遮蔽情况下IAFSA与P&O最大功率点跟踪效果比较
初始时刻光伏阵列受光照程度均匀,光强为1 kW/m2。3.5 s时光伏阵列部分被遮挡,光伏阵列不同区域的光照强度分别为1 kW/m2,0.5 kW/m2,0.2 kW/m2,其P-V输出曲线如图2,第一个峰值点功率值为82.853 W,第二个峰值点即最大功率点值为115.528 W,第三个峰值点为73.236 W。针对此条件分别采用IAFSA与P&O对光伏阵列进行最大功率点跟踪,两种算法中参数取值与3.1节中相同,跟踪效果如图6所示。3.5 s时光伏阵列在遮蔽情况下运行时,IAFSA搜索到的最大功率点值为115.524 W,P&O跟踪到的最大功率点值为82.785 W。由此可知P&O在遮挡情况下没有跟踪到光伏阵列的最大功率点而是陷入了局部极值点的跟踪,IAFSA在光伏阵列存在遮蔽情况仍能搜索及跟踪到光伏阵列的最大功率点。

图6 遮蔽情况下IAFSA与P&O的最大功率点跟踪Fig.6MPPT of IAFSA and P&O under partial shading
3.3 遮蔽情况下IAFSA与PSO最大功率点跟踪效果比较
光伏阵列在遮蔽情况下不同区域的光照强度分别为1 kW/m2,0.5 kW/m2,0.2 kW/m2,在3.5 s时温度由25℃变为20℃,。分别采用IAFSA与PSO算法对光伏阵列进行最大功率点跟踪,IAFSA算法中参数选择与3.1节中相同,PSO中迭代次数为10,粒子数为30,学习因子1、2取值均为1.496 2,惯性权重取0.729 8。两种算法的跟踪效果如图7所示。相比之下粒子群优化算法在跟踪过程中使输出功率产生波动,降低了发电效率。

图7 IAFSA与PSO跟踪算法比较Fig.7MPPT of IAFSA and PSO
4 结语
针对扰动观察法等传统方法进行光伏阵列部分被遮挡时的最大功率点跟踪易陷入局部极值,一些智能算法跟踪精度不高、控制复杂等特点,提出了一种基于改进的人工鱼最大功率点跟踪方法。该方法首先搜索到光伏阵列的最大功率点,然后由小步长扰动观察法实现对光伏阵列最大功率点的实时跟踪,提高了光伏系统的稳态性能和输出效率,是一种行之有效的搜索跟踪方法。
[1]栗秋华,周林,刘强,等(Li Qiuhua,Zhou Lin,Liu Qiang,et al).光伏并网发电系统最大功率跟踪新算法及其仿真(Simulative research of MPPT for photovoltaic power system)[J].电力自动化设备(Electric Power Automation Equipment),2008,28(7):21-25.
[2]赵庚申,王庆章,许盛之(ZhaoGengshen,WangQingzhang,Xu Shengzhi).最大功率点跟踪原理及实现方法的研究(Research on realization means and principle of maximum power point tracking)[J].太阳能学报(Acta Energiae Solaris Sinica),2006,27(10):997-1001.
[3]Esram T,Chapman P L.Comparison of photovoltaic array maximum power point tracking techniques[J].IEEE Trans on Energy Conversion,2007,22(2):439-449.
[4]Dorofte Cristinel,Borup Uffe,Blaabjerg Frede.A combined two-method MPPT control scheme for grid-connected photovoltaic systems[C]//11th European Conference on Power Electronics and Applications,Dresden,Germany:2005.
[5]熊远生,俞立,徐建明(Xiong Yuansheng,Yu Li,Xu Jianming).固定电压法结合扰动观察法在光伏发电最大功率点跟踪控制中应用(MPPT control of photovoltaic generation system combining constant voltage method with perturb-observe method)[J].电力自动化设备(Electric Power Automation Equipment),2009,29(6):85-88.
[6]李鹰,康龙云,朱洪波,等(Li Ying,Kang Longyun,Zhu Hongbo,et al).一种新型光伏发电系统最大功率跟踪算法(Improved maximum power point tracking algorithm for stand-alone photovoltaic system)[J].电气传动(Electric Drive),2010,40(12):35-39.
[7]焦阳,宋强,刘文华(Jiao Yang,Song Qiang,Liu Wenhua).基于改进MPPT算法的光伏并网系统控制策略(Control strategy of grid-connected photovoltaic generation system based on modified MPPT method)[J].电力自动化设备(Electric Power Automation Equipment),2010,30(12):92-96.
[8]卢秀和,王娇(Lu Xiuhe,Wang Jiao).基于中值步长法的光伏阵列最大功率点跟踪(Photovoltaic array maximum power point tracking based on intermediate value of step length method)[J].可再生能源(Renewable Energy Resources),2010,28(5):10-14,18.
[9]任碧莹,申明,孙向东(Ren Biying,Shen Ming,Sun Xiangdong).一种新颖的光伏电池最大功率点跟踪方法(A novel maximum power point tracking method for photovoltaic cell)[J].电力电子技术(Power Electronics),2010,44(11):10-12.
[10]黄舒予,牟龙华,石林(Huang Shuyu,Mu Longhua,Shi Lin).自适应变步长MPPT算法(Adaptive variable step size MPPT algorithm)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2011,23(5):26-30.
[11]刘立群,王志新,张华强(Liu Liqun,Wang Zhixin,Zhang Huaqiang).部分遮蔽光伏发电系统模糊免疫MPPT控制(Fuzzy-immune MPPT control of PV generation system under partial shade condition)[J].电力自动化设备(Electric Power Automation Equipment),2010,30(7):96-99,116.
[12]刘艳莉,周航,程泽(Liu Yanli,Zhou Hang,Cheng Ze).基于粒子群优化的光伏系统MPPT控制方法(MPPT control method of PV system based on PSO)[J].计算机工程(Computer Engineering),2010,36(15):265-267.
[13]王联国,施秋红,洪毅(Wang Lianguo,Shi Qiuhong,Hong Yi).PSO和AFSA混合优化算法(Hybrid optimization algorithm of PSO and AFSA)[J].计算机工程(Computer Engineering),2010,36(5):176-178.
[14]李晓磊,邵之江,钱积新(Li Xiaolei,Shao Zhijiang,Qian Jixin).一种基于动物自治体的寻优模式:鱼群算法(An optimizing method based on autonomous animals:fish-sw arm algorithm)[J].系统工程理论与实践(Systems Engineering-Theory&Practice),2002,(11):32-38.
[15]翟载腾,程晓舫,丁金磊,等(Zhai Zaiteng,Cheng Xiaofang,Ding Jinlei,et al).被部分遮挡的串联光伏组件输出特性(Characteristics of partially shadowed serial PV module output)[J].中国科学技术大学学报(Journal of University of Science and Technology of China),2009,39 (4):398-402.
Maximum Power Point Searching and Tracking of Partially Shaded Solar Photovoltaic Arrays
ZHU Zhi-yu,YUAN Lin,CHEN Xun
(School of Electronic Information,Jiangsu University of Science and Technology,Zhenjiang 212003,China)
The PV arrays is always partially shadowed when it is operated.In this condition the output get more complicated,which became highly nonlinear,time-variable uncertainty and exist multiple peaks.An improved artificial fish swarm algorithm is presented in this paper.The method combined artificial fish swarm algorithm with perturb and observe algorithm,so the maximum power point searching and tracking are separated.Considering both the correlation and independence that effectively improved the generating efficiency of the photovoltaic system.The simulation experiment indicates that no matter the PV arrays is partially shaded or not,the algorithm produces a good effect on searching and tracking the global maximum power point of the PV arrays and avoids falling into the local maxima.
maximum power point tracking(MPPT);artificial fish swarm algorithm(AFSA);PV arrays;partial shadowing
TM615
A
1003-8930(2013)04-0063-05
朱志宇(1971—),男,博士,教授,硕士生导师,研究方向为电力系统控制、非线性系统滤波。Email:zzydzz@163.com
2012-05-03;
2012-06-03
江苏高校优势学科建设工程资助项目
原琳(1987—),女,硕士研究生,研究方向为光伏并网发电技术。Email:zhenjiangyuanlin@126.com
陈迅(1976—),男,博士,副教授,硕士生导师,研究方向为自动化检测装置、嵌入式系统。Email:justlab@163.com
