并联有源电力滤波器电流控制策略研究
2013-07-02蒋正荣黄波李正熙
蒋正荣,黄波,李正熙
(北方工业大学 电力电子与电气传动工程研究中心,北京 100144)
1 引言
电力电子技术的飞速发展使得越来越多的电力电子装置被应用到各个领域,其中一部分负荷具有非线性,电网污染越来越严重,有源电力滤波器在改善电能质量方面有很多优点,因而被广泛应用。
指令运算电路[1]计算出负载中的谐波,作为给定的指令信号,通过电流内环控制逆变器的开关动作,使得交流侧输出电流动态跟踪指令电流,从而实现电网电流的正弦化。由此看出,电流内环的控制作用产生的动态跟踪效果直接决定着有源电力滤波器的性能。
传统PI 控制[2]是一种成熟的控制方式,经常用于控制系统的电流环调节,在现实控制系统中发挥着重要的作用。对于PI 调节器,它能无静差
的跟踪给定的直流信号,然而对于有源电力滤波器而言,它的给定信号在dq轴下是交流信号,PI 控制做不到无差跟踪。本文引入重复控制[3]和电压前馈,并且和传统的PI 控制进行了对比,基于电压前馈的并联重复控制+PI 控制能提高电流跟踪速度,最大限度消除静态误差,具有良好的补偿效果。
2 PI+电压前馈的电流环控制
2.1 SAPF(Shunt Active Power Filter)数学模型的建立[4]
PI 调节器作为一种成熟的控制方式,在APF的控制系统中也得到了广泛应用,结合数学模型,电流内环采用了PI 和电压前馈相结合的控制策略。以三相三线制APF 为例,其拓扑结构如图1所示。
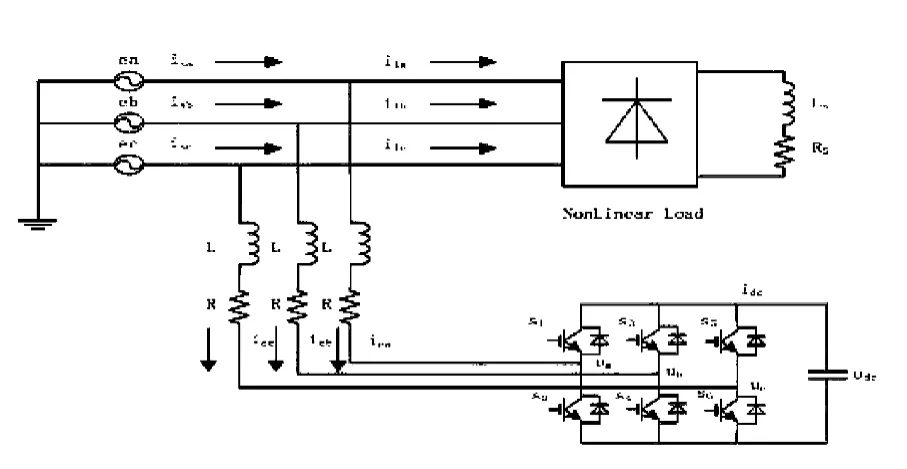
图1 三相三线制SAPF 拓扑结构框图 Fig.1 Three-phase three-wire SAPF topology diagram
图1中,电网电压-ea,eb,ec,网侧电流-isa,isb,isc,负载电流-ila,ilb,ilc,变流器侧输出电压-ua,ub,uc,变流器侧输出电感-L,电阻-R,直流母线电压-Udc,电流-idc,S1,S2,S3,S4,S5,S6是六个开关变量,变流器侧输出电流-ica,icb,icc。
根据基尔霍夫定律可以得到SAPF的数学方程:

将以上数学方程式(1)两边同时作dq旋转变换得:
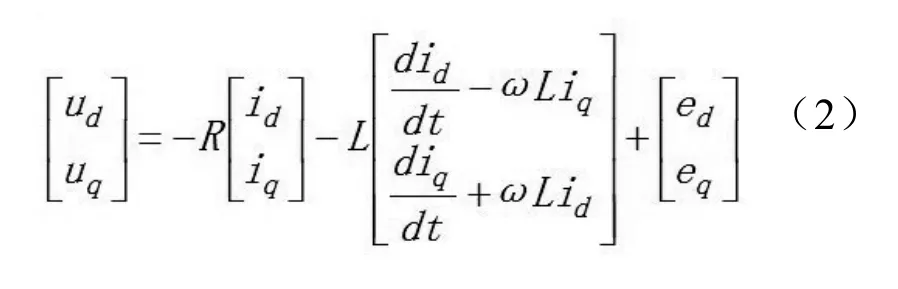
从式(2)可以看出,id和iq之间存在着耦合关系,不利于控制,为了便于控制,本文引入了电压前馈解耦,并且加入了PI 调节器,消除了id和iq的耦合,使其可以单独控制。经过以上数学处理的方程变为:

基于PI 和电压前馈相结合的控制策略的控制框图如2 所示。

图2 PI+电压前馈控制框图 Fig.2 PI and voltage feedforward control block diagram
2.2 PI 参数的整定
PI 调节器在系统中控制作用的优劣取决于PI 参数与控制系统是否匹配,这些参数直接影响着系统的稳定性和快速性,因而PI 调节器参数的设计[5]显得至关重要。
若将采样延时,计算延时,以及变流器的延时考虑在内,电流内环的等效传递函数[6]模型如图3所示。

图3 PI 控制电流环传递函数框图 Fig.3 The transfer function block diagram with the PI controling current loop
它的闭环传递函数是显然是高阶的,不利于对系统的处理,由于采样延时和计算延时非常小,可以忽略,并且忽略电网的扰动,将PI 控制的电流内环模型予以简化,电流内环简化以后的等效传递函数模型如图4所示。
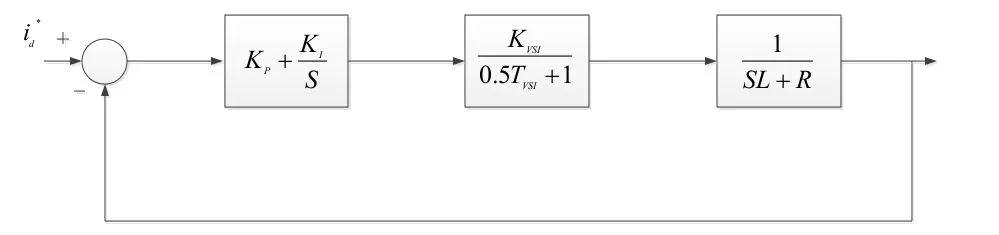
图4 PI 控制电流环简化传递函数框图 Fig.4 The simplified transfer function block diagram with the PI controling current loop
该简化模型的闭环传递函数为
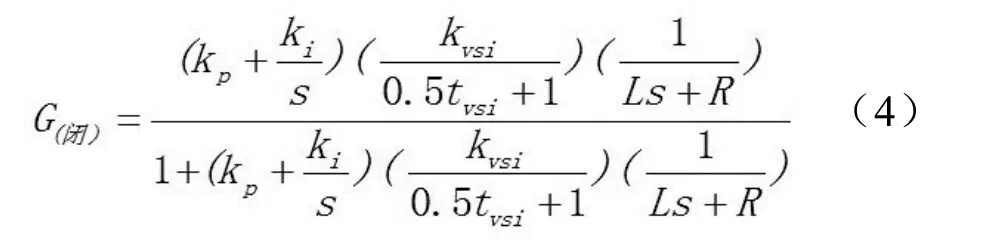
根据零极点对消法,令

化简得:

按照如下典型环节处理

其中
图7是补偿前A相网侧电流波形,对其进行FFT分析,A相电流的谐波总畸变率THD 是29.66%。

取阻尼系数ζ=0.707,开关周期tvsi=1e-4 s,交流输出侧电感L=0.25e-3 H,R=0.8 Ω 变流器增益kvsi=2,代入式(9)和式(5)可以得到kp和ki。
从后文仿真波形来看,电源侧电流波形得到很大改观,趋于正弦,但是有尖峰,这是由于PI无法无静差的跟踪交流信号造成的稳态误差,重复控制能将误差信号周期性累加,直到误差减小到零。所以下文提出了采用重复控制来减小稳态误差的办法。
3 嵌入式并联PI 和重复控制相结合的复合控制策略
3.1 重复控制原理
重复控制是基于内模原理[7]的控制策略,若闭环控制系统稳定且包含有输入信号保持器,则系统在稳定的条件下能精确跟踪任意参考输入信号。在系统工作时,在一个周期内采集误差信号,下周期输出误差信号,这种误差可以累加,直至无静差跟踪。即使输入信号为零,内模还是会逐次输出上个周期的信号。
APF 的给定信号是交流谐波周期信号,根据内模原理,建立所有谐波信号的内模会加大控制器的复杂程度,而且也不符合实际,鉴于谐波频率是基波频率的整数倍,所以把所有的谐波周期都取为基波周期,这样就可以建立交流谐波周期信号的内模了。
内模模型公式为

重复控制器的完整控制框图如5 所示。

图5 重复控制Z 域传递函数框图 Fig.5 The transfer function block diagram in the discrete domain with repetitive control
其中z-N是周期延迟环节,Q(z)是滤波器,S(z)是补偿环节,zk是相位补偿,kr是重复控制增益。
3.2 重复控制器的参数整定
重复控制器[8]的参数设置对于对于控制效果至关重要。
延迟系数N=Ts/Tvsi,其中Ts为基波周期,Tvsi开关周期,对于本文,Ts=0.02 s,Tvsi=0.1 ms,所以N=200。
如果使控制系统稳态误差为零,必须满足Q(z)=1,但是要使系统稳定Q(z)<1,所以Q(z)取一个接近于1 的数,本文取Q(z)=0.98。
重复控制增益kr越小,稳定性越好,但收敛速度变慢,稳态误差变大[7],在系统良好稳定性的前提下,kr尽量接近于1。本文kr=0.9。
由于系统存在变流器和采样的延时,所以需要对相位进行补偿,由于延时很小,所以k=2。
有源滤波器补偿的电网谐波频率主要处于中低频段,所以在保持系统稳定的前提下,可以忽略高频段,因此S(z)=1,S(z)在高频段的设计参见文献[8]。
3.3 复合控制策略
采用重复控制技术可以获得很好的稳态输出特性,并且稳定性也很好,但是其跟踪误差调节滞后一个工频周期,当负载发生突变时,对误差几乎没有抑制作用,造成补偿性能的欠佳。然而,PI 调节器是以开关周期跟踪误差调节的,动态响应快。若负载出现扰动时,PI 调节器立即发生调节作用,当达到接近稳态时,重复控制器发生作用,PI 调节器的作用减弱。
因此采用PI 控制和重复控制相结合的复合控制策略,控制框图如图6所示。

图6 复合控制Z 域传递函数框图 Fig.6 The transfer function block diagram in the discrete domain with complex control
4 仿真结果
在Matlab/Simulink 下建立仿真模型,对上述控制策略进行仿真分析,仿真参数设置为:线电压690 V,频率50 Hz,直流侧参考电压1 100 V,交流侧电感0.25 mH,电阻0.8 Ω,网侧负载为三相不控整流桥直流侧接电阻,阻值为5 Ω。
图7是补偿前A相网侧电流波形,对其进行FFT 分析,A相电流的谐波总畸变率THD 是29.66%。
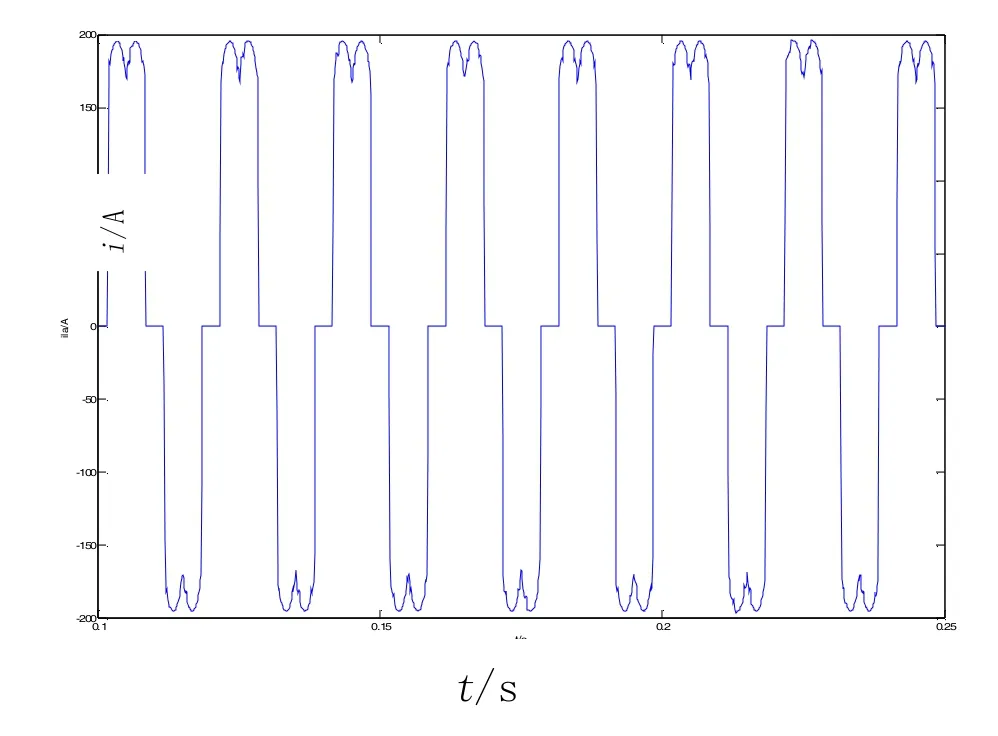
图7 补偿前A相网侧电流波形 Fig.7 Aphase grid current waveform before compensation
图8是单独采用PI 控制后,A相电源电流侧波形,可以看出波形有了明显改善,THD 减小到18.64%。但是在波形的过零处以及接近于波峰和波谷的地方存在着尖峰,波形整体还不够光滑,稳态误差仍需要进一步减小。

图8 单独采用PI 补偿后A相网侧电流波形 Fig.8 Aphase grid current waveform after compensation with PI control
图9是采用PI 控制和重复控制相结合的复合控制策略以后A相网侧电流波形,可以看出波形较之前单独PI 控制以后的波形更加光滑,而且尖峰有了明显的削减,稳态误差减小,THD 进一步减小到了3.97%,满足国家标准中电网电流THD 低于5%的规定,也进一步验证理论分析的正确性。
仿真结果表明,PI 调节器和重复控制并联组组成的电流内环可以同时提高系统的动态响应和减小系统的稳态误差,达到的滤波效果最好。

图9 采用复合控制补偿后A相网侧电流波形 Fig.9 Aphase grid current waveform after compensation with complex control
5 结论
本文探究了单独的PI 控制和重复控制在并联有源电力滤波器电流跟踪控制系统中的优缺点,提出了将二者结合使用的复合控制策略,通过理论分析和仿真结果验证了这一提法的可行性。
[1] 王兆安,杨君,刘进军,等.谐波抑制和无功功率补偿[M] .北京:机械工业出版社,2005 .
[2] 周娟,耿乙文.基于SVPWM 三相三线有源滤波器控制策略研究[J] .电气应用,2009,28(24):36-39.
[3] 李翠燕,张东纯,庄显义.重复控制综述[J] .电机与控制学报,2005,9(1):36-41.
[4] 姜齐荣,赵东元,陈建业.有源电力滤波器——结构·原理·控制[M].北京:科学出版社,2005.
[5] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2000.
[6] 胡寿松.自动控制原理[M].第3 版.北京:国防工业出版社,1996.
[7] 陈宏.基于重复控制理论的逆变电源控制技术研究 [D].南京:南京航空航天大学,2003 .
[8] 魏学良.三相三线并联型APF 电流环数字化控制研究 [D].南京:南京航空航天大学,2003:107-117.
[9] 耿 攀,戴 珂,魏学良,等.三相并联型有源电力滤波器电流重复控制[J].电工技术学报,2007,22(2)127-131.
