基于空间矢量调制的永磁同步电机新型直接转矩控制策略
2013-07-02邢岩王旭刘岩杨丹
邢岩,王旭,刘岩,杨丹
(东北大学 信息科学与工程学院,辽宁 沈阳 110819)
1 引言
直接转矩控制系统结构简单,具有优良的静、动态性能。直接转矩控制根据磁链偏差、转矩偏差和定子磁链的空间位置,选择合适的电压矢量[1],具有较好的动态性能,但是在传统的直接转矩控制方案中,通用的电压型逆变器可供选择的基本电压空间矢量始终只有8 个,其中6 个为非零电压空间矢量,它们在空间上相隔60°分布,所以电压空间矢量的切换不是连续的。在一个控制周期内,只选用一个电压空间矢量,既不能调整定子磁链的方向,又不能控制其变化的大小,因此磁链和转矩的脉动不可避免。减小滞环容差可以减小脉动,但会导致逆变器的开关频率增大,开关损耗随之增加。
针对以上提出的磁链和转矩脉动大的缺点[2-3],文献[4]提出矢量细分法改善了磁链轨迹,但结构复杂。本文设计了一种将空间矢量调制与直接 转矩控制相结合的控制策略[5-7],即运用空间矢量调制技术来减小电磁转矩和定子磁链的脉动。在一个控制周期内,选择相邻的两个非零电压矢量和零电压矢量,计算每个电压矢量的作用时间,从而合成所需的电压空间矢量,进而控制逆变器开关的通断。这种方法从根本上摒弃了开关状态选择表的概念。从仿真效果上来看,这种控制方法有效地解决了滞环控制器所引起的转矩和磁链脉动的问题。
2 滞环控制器分析
用数字方式实现的滞环控制器与模拟滞环控制器有很大不同。图1显示了滞环控制器模拟实现与数字实现时典型的开关切换点序列。

图1 滞环比较器模拟与数字实现时典型开关切换图 Fig.1 Analogue and digital achievement of hysteresis comparator
图1a 为滞环比较器模拟实现时的开关切换示意图,图1b 为数字实现示意图。从图1a 可以看出,若采用模拟的滞环控制器,当被控物理量增加到滞环最大值时,由于滞环控制器的作用,会输出令物理量减小的指令,从而改变被控量的状态,因此模拟滞环控制器下的磁链和转矩误差可以控制在滞环带宽范围内;若采用的是数字滞环控制器控制磁链和转矩误差,如图1b 所示,由于数字实现的特点—采样周期固定,只有在采样周期到达才会发生控制量的切换,因此当磁链和转矩误差从一个方向运行增加至带宽最大限幅值时,滞环控制器的状态可能不会马上发生改变,只有当本采样周期的控制实现完毕,即将进入下一个采样周期时,滞环控制器的状态才会发生变化,从而导致被控物理量的脉动可能会超出滞环带宽,造成脉动过大。
3 永磁同步电机数学模型
假设忽略电动机铁心饱和,不计电动机的涡流和磁滞损耗,转子无阻尼绕组,则永磁同步电机在 -α β轴坐标系下的电压、磁链和电磁转矩方程为
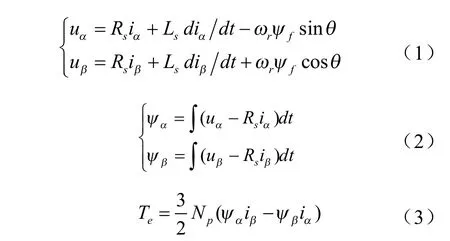
式中,uα,uβ,iα,iβ,分别为定子电压、电流α,β轴分量;Rs,Ls为定子绕组电阻和电感;ψf为转子永磁体磁通;ωr为转子角速度;θ为转子电气位置,dθ/dt;p 为微分算子,p=d/dt。
4 SVM-DTC 系统建立
结合传统直接转矩控制的相关原理,建立基于空间矢量调制的直接转矩控制(SVM-DTC)的系统框图如图2所示。
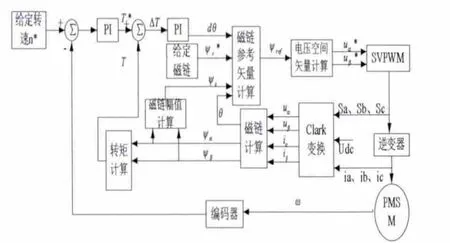
图2 SVM-DTC 系统框图 Fig.2 The system chart of SVM-DTC
图2中空间电压矢量脉宽调制(SVPWM)模块是把电动机与逆变器看为一体,着眼于使电动机获得幅值恒定的圆形磁场。以三相对称正弦电压供电时产生的理想磁链圆为基准,用逆变器不同的开关模式所产生的有效矢量来逼近基准圆。具体的计算方法为:首先通过定子电压分量uα*和uβ*来判断电压矢量所处区间,再计算各基本矢量和零矢量的作用时间,最后确定功率器件的导通时刻。
4.1 电压矢量所在扇区判断
定义以下变量:
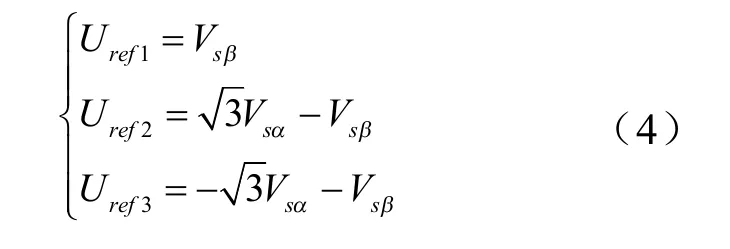
用下式计算N值:

其中:

故可得N与扇区号的对应关系如表1所示。
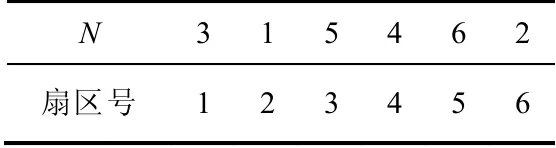
表1 N值与扇区号的对应关系 Tab.1 Corresponding relation of the Q value and vector number
4.2 矢量作用时间的计算
当电压矢量位于不同的扇区时,逆变器的各开关状态的导通时间是变化的,如表2所示。

表2 不同扇区的 1T,2T取值 Tab.2 Value ofT1andT2in different sectors
其中:
根据表2对T1,T2进行赋值后,还要对其进行饱和判断。如果T1+T2>T,则取:
4.3 切换时刻的计算
设定如下的变量和变换关系:
然后根据不同的扇区,按表3对三相功率器件的导通时刻进行,其中分别表示逆变器A,B,C三相的导通时刻。

表3 切换点Tcm的计算 Tab.3 Calculation of switch pointTcm
利用切换点Tcm1,Tcm2,Tcm3的计算值和三角波进行比较就可以得到SVM 的输出时序。
4.4 空间矢量控制策略
由传统的直接转矩控制可知,定子电流、电压采样后,经过CLARK 变换以及简单的数学运算后,就可以获得在两相静止α-β坐标系下的磁链幅值ψs(k)和相角θ(k)。一个控制周期完毕后,定子磁链的幅值变为ψs(k+ 1),相角变为θ(k+ 1),他们之间的夹角为Δθ。如图3所示。
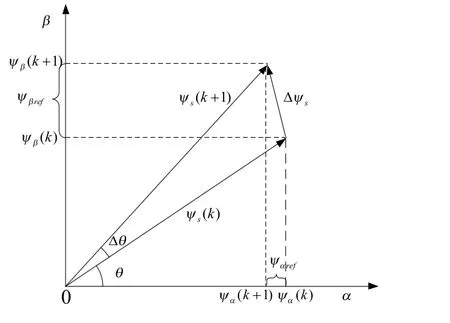
图3 SVM-DTC 系统中的磁链矢量图 Fig.3 The flux vector in the SVM-DTC system
由图3,令ψs(k+1)=ψs*,ψs(k)=ψs,则可得:

定义ψs(k+ 1)与ψs(k)的差为参考磁链ψref,即:ψref=ψs(k+1)-ψs(k),因此:

以上的计算过程为参考磁链的生成方法。为了补偿该误差矢量ψref,需要产生一个等效的参考电压矢量Uref。由,离散化可得:,所以:
化简得:

将式(10)代入式(11),得:

5 仿真实验
应用Simulink 对传统直接转矩,矢量细分直接转矩和空间电压矢量直接转矩控制策略进行了突变转矩仿真研究。给定PMSM 和仿真参数如下:极对数np=2;定子电阻Rs=0.144 Ω;永磁体磁链ψf=0.258 Wb;交轴电感Ld=0.8 mH;直轴电感Lq=0.8 mH;周期为Ts=0.000 1 s,给定转速为n*=1 200 r/min,给定磁链为0.2 Wb;t=0.1 s 时,负载转矩由1 N•m 突变为1.5 N•m。SVM-DTC 在给定转速n*=700 r/min的仿真波形如图4~图7所示。
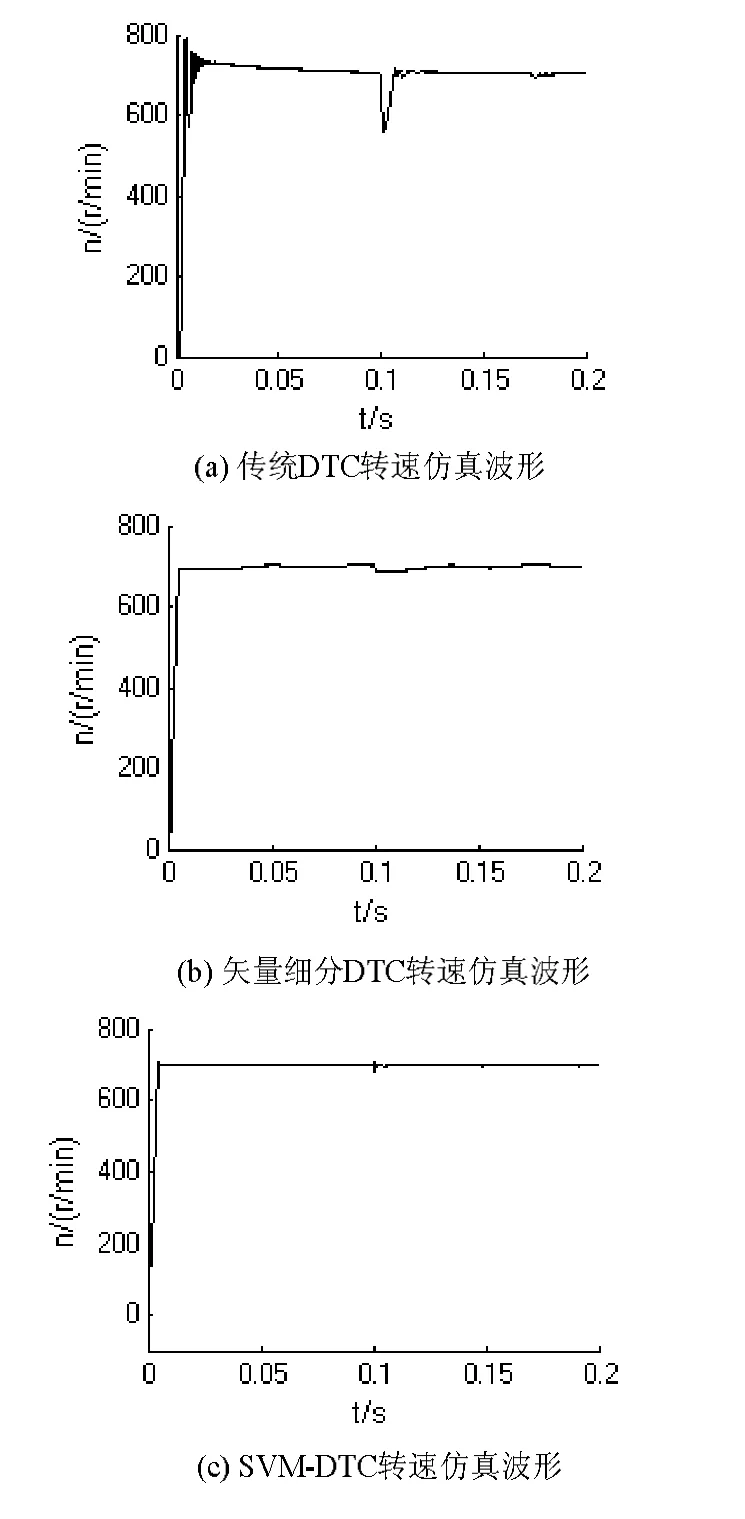
图4 转速仿真波形图 Fig.4 Simulation waveforms of rotate speed
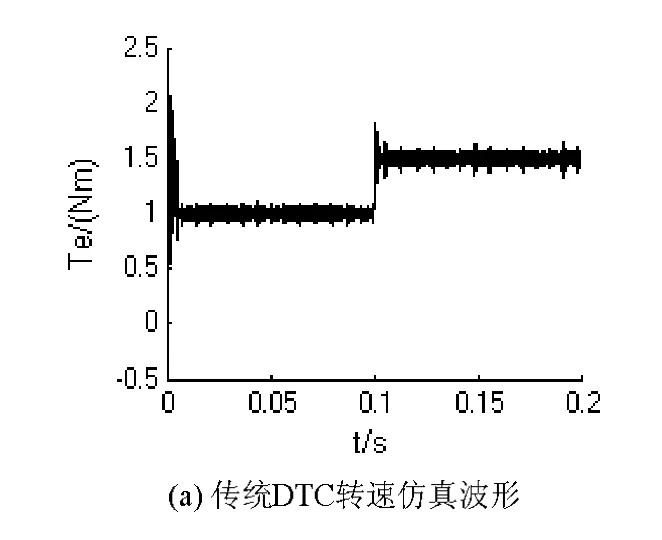
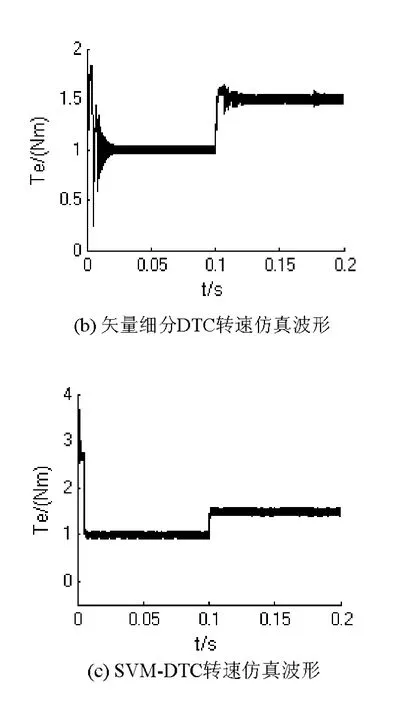
图5 转矩仿真波形图 Fig.5 Simulation waveforms of torque
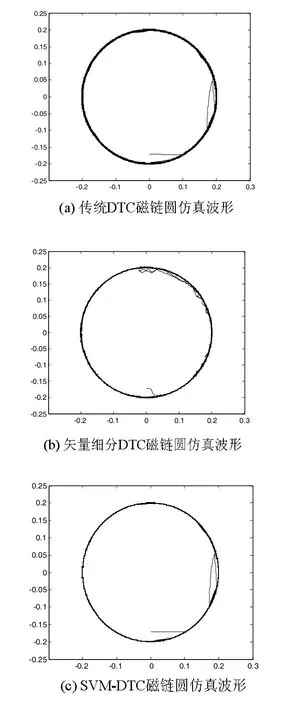
图6 磁链仿真波形图 Fig.6 Simulation waveforms of flux
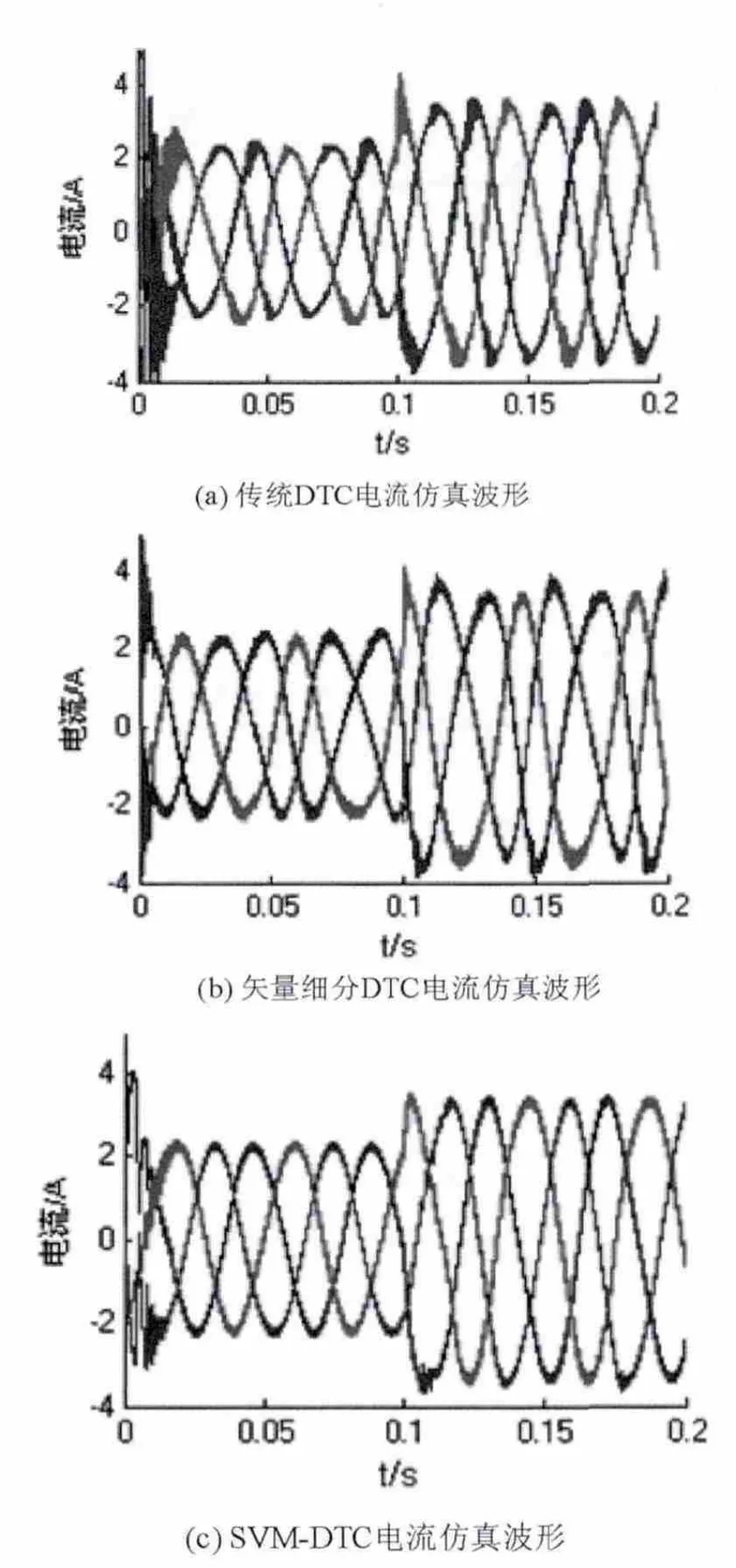
图7 电流仿真波形图 Fig.7 Simulation waveforms of current
6 结论
本文在详细分析传统直接转矩控中制滞环控制器产生较大转矩和磁链脉动的基础上,提出了基于空间电压矢量的直接转矩控制策略,该策略不需要进行坐标旋转变换,因而系统结构简单、实现方便。仿真结果表明,采用空间电压矢量控制的直接转矩控制并未影响到系统响应的快速性,系统的转矩运行平稳,相对于传统直接转矩控制和矢量细分算法转矩和磁链脉动有了明显的减小,且电流的畸变也得到了明显的改进。
[1] Takahashi I,Naguchi T.A New Quick-response and High-efficiency Control Strategy of an Induction Motor[J].IEEE Transaction on Industry Applications (S0093-9994),1986,22(4):820-827.
[2] Mohammed Rakibul Islam,Cogging Torque.Torque Ripple and Radial force Analysis of Permanent Magnet Synchronous Machines[D].University of Akron,2009.
[3] Zhong L,Rahman M F,Huand W Y,et al.Analysis of Direct Torque Control in Permanent Synchronous Motor Drives[J].IEEE Transactions on Power Electronics (S0885-8993),2007,12(3):528-536.
[4] Takahashi,Ohmori Y.High-performance Direct Torque Control of an Induction Motor[J].IEEE Transactions on Industry Applications,1989,25(2):257-264.
[5] 陈颖,卓菡.基于空间矢量脉宽调制的直接转矩控制的交流测功系统[J].自动化与仪器仪表,2012(2):125-128.
[6] 王坚,桂卫华,李祥飞,等.基于恒定开关频率空间矢量调制的异步电机间接转矩控制[J].电工技术学报,2007,22(6):35-40.
[7] 苏陈云,杨向宇.永磁同步电机直接转矩控制转矩脉动的产生及其抑制方法综述[J].微电机,2010,43(3):81-85.

