笼型转子永磁同步电机VSI/LCI组合供电软启动技术研究
2013-07-02许家群阎宝光
许家群,阎宝光,2
(1.北京工业大学 电子信息与控制工程学院,北京 100124; 2.迅捷卓越传动系统科技(北京)有限公司,北京 100102)
1 引言
笼型转子永磁同步电机,也称为自启动永磁同步电机或异步启动永磁同步电机(LSPMSM),具有高效率、高功率因数、高转矩密度及具备自启动能力等特点,在工业应用中极具前景,相关研究主要集中在电机本体设计及直接启动特性分析等方面[1-5]。
然而,随着LSPMSM 容量不断提高,起动 问题已经逐渐阻碍了其推广应用,一个原因在于 LSPMSM 直接启动电流过大[6],此外,直接启动过程电机转矩不可控,会对负载造成较为严重的机械冲击。在目前的实际应用中,通常采用两种方法解决上述问题。一是应用品闸管调压的软启动器,具有结构简单、价格便宜、控制方便等优点,可有效降低启动电流,但启动转矩较小一直是其面临的难题[7-8]。另一方法是使用通用变频器,可应用V/f等控制方式拖动LSPMSM 获得优 异的启动性能[9],然而启动大容量LSPMSM 所需的大电流IGBT 等全控型功率器件使得变频器成 本过高,难以被用户接受。
负载换流逆变器(LCI)是一种电流源逆变器,其结构如图1所示,有高速下的自然换流与低速下的电流断续换流两种换流模式,主要应用于排风机和抽水蓄能机组等大型电励磁同步电机系统中[10-12]。LCI 主功率回路主要采用品闸管器件,因此其成本相对较低。
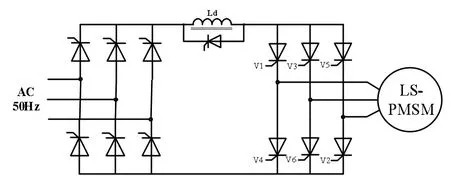
图1 LCI 主功率电路 Fig.1 Main power circuit of LCI
从提高性价比的角度出发,LCI 是一种有潜在价值的大容量LSPMSM 软起动解决方案。但是,传统LCI 在低速运行区采用断续换流方式,会导致很大的转矩和转速波动,并造成启动时间长、拖动重载能力差等严重问题。为此,本文提出VSI/LCI 组合供电模式,采用低成本的霍耳元件作为转子位置传感器,在电机低速运行区应用基于低耐压值全控型功率器件的VSI 进行准无位置传感器矢量控制,当反电势达到品闸管自然换流条件时切换到LCI 运行,在保证低成本的基础上有效提高传统LCI 的低速性能。
本文给出了VSI/LCI 组合供电系统结构,详细分析了包括VSI 准无位置传感器矢量控制及其与LCI 切换控制等在内的相关软启动方法,基于Matlab/Simulink 软件构建了仿真模型,给出并比较了传统LCI 和VSI/LCI 组合供电LSPMSM 的仿真结果,验证了所述方法的有效性。
2 VSI/LCI 软启动系统结构
VSI/LCI 软启动系统结构如图2所示,主要包括LCI,VSI,LSPMSM 和切换开关等4 部分。
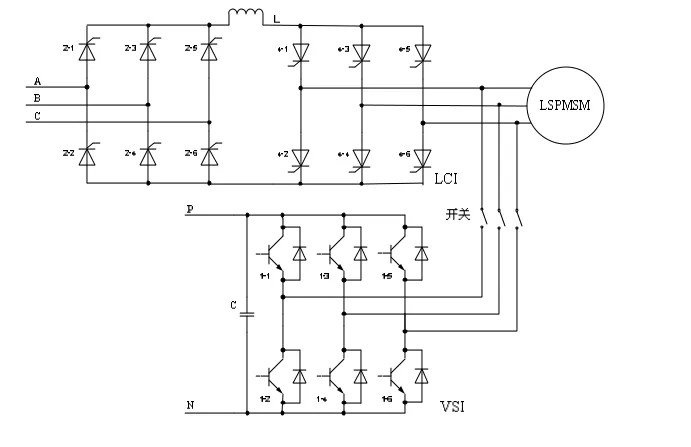
图2 VSI/LCI 系统结构图 Fig.2 The structure of VSI/LCI soft starter
与传统LCI 相比,该结构去掉了直流母线平波电抗器上反并联的晶闸管。LCI 采用三相交流系统供电,经晶闸管整流器和晶逆变器后驱动LSPMSM;VSI 仅需保证电机在低转速区启动,因此直流母线仅需较低电压,根据实际应用的电压等级采用MOSFET 或IGBT等全控型功率器件。
LSPMSM 上布置3 个互差120°电角度的霍耳元件作为转子位置传感器,VSI 和LCI 输出侧经三相断路器开关进行隔离,从而可以根据启动进程分别选择其中一个用于驱动LSPMSM。
3 VSI/LCI 软启动方法
3.1 VSI 准无位置传感器矢量控制
图3为LSPMSM 采用id=0 矢量控制策略下的转速、电流双闭环系统结构图。其中,转速PI调节器输出交轴电流给定值iq*,直轴电流给定值id*为零,与反馈量iq,id的偏差经PI 调节器计算Ud,Uq,再通过2r/3s 变换得到Ua,Ub与Uc。
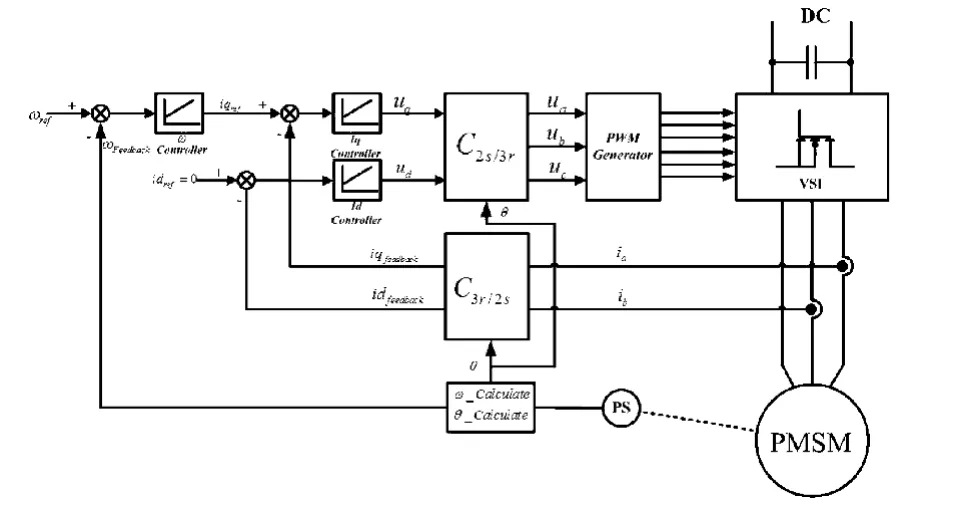
图3 LSPMSM 矢量控制系统结构图 Fig.3 Vector control system for LSPMSM
VSI 矢量控制需要转子位置θ的实时精确信息。由于霍耳元件输出的是离散的转子位置信号,为了有效保证转子位置检测的准确性,引入一阶转子位置辨识方法估算连续转子位置实现准无位置传感器控制,具体如下:

式中:tk为当前转子位置变化时间;tk-1为上一次区间变化时间;Δt为转子位置变化时间;ωtk为电角速度;θk为转子位置初始值。
3.2 VSI 到LCI 的切换及自然换流控制
当VSI启动LSPMSM转速达到额定转速的10%时切入LCI 进行自然换流。此时,LCI 开始工作,同时切掉VSI 主回路,之后工作在LCI 自然换流状态以保证转矩的连续性,直至额定转速。切换过程中,转速作为决定定子绕组反电势的重要因素,是判断自然换流的重要条件,实际应用中,需要保证切换转速确已满足电机绕组反电动势自然换流要求。切换过程如图4所示,选择所示k点为切换点,图4中阴影部分为VSI 方式低速起动运行区域,而后经k点后切换为LCI 自然换流方式,既保证了换流的连续性,又保证了换流超前角γ0=60°。

图4 VSI 与CSI 切换过程 Fig.4 The transition process from VSI to LCI
图5为LCI 转速、电流双闭环自然换流软启动控制结构。其中,速度PI 调节器输出作为直流母线电流给定,电流PI 调节器输出作为整流器中晶闸管的触发角给定,用于调节直流母线电流。
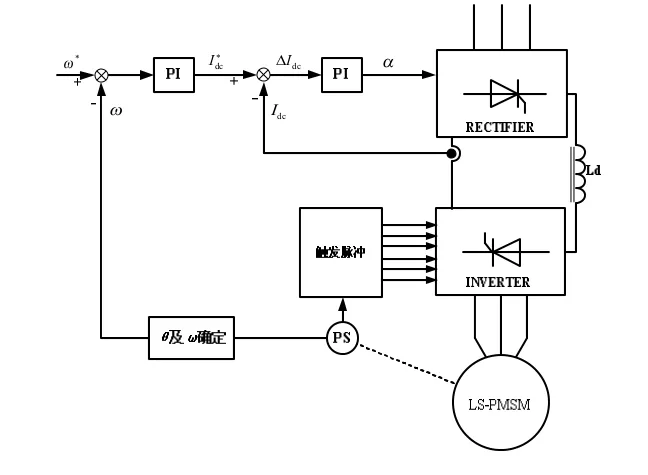
图5 LCI 启动控制结构 Fig.5 Soft start control structure of LCI
当LSPMSM 运行于高转速,反电势足以保证图1中逆变器晶闸管V1~V6 进行自然换流时,利用霍耳元件估算反电势与转子的相对位置,6个晶闸管V1~V6 在每个周期中分别导通120°电角度,之后处于关断状态,自然换流过程的6 个状态如表1所示,由状态①到⑥依次完成。为保证换流的可靠性,选取换流超前角γc=60°。
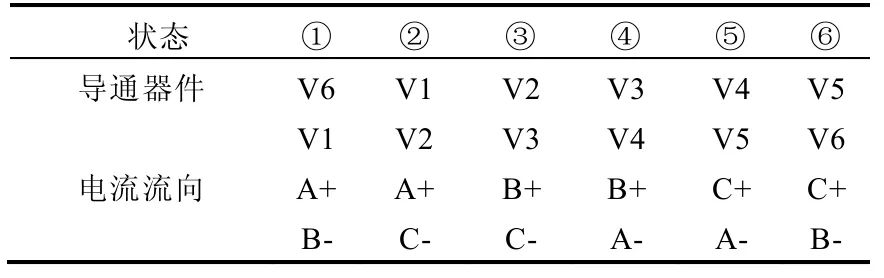
表1 自然换流工作状态 Tab.1 States during natural commutation process
4 VSI/LCI 软启动系统仿真
4.1 LSPMSM 数学模型
在忽略铁心饱和、不计涡流和磁滞损耗等条件下,LSPMSM 在d-q坐标系下的数学模型表示如下:
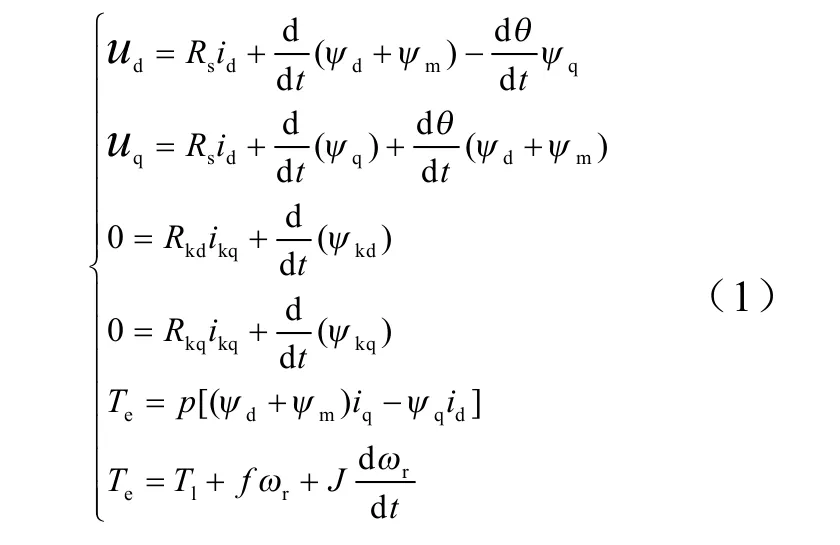
式中:ud,uq为定子电压分量;id,iq为定子电流分量;ikd,ikq为阻尼绕组电流;Ψd,Ψq为定子磁链;Ψkd,Ψkq是转子阻尼绕组磁链;Rs为定子绕组电阻;Rkd,Rkq为阻尼绕组电阻;Te为电磁转矩;p为极对数;J为轴上的转动惯量;f为阻尼系数;Tl为负载转矩。
仿真用LSPMSM 参数如下:p=2;nN=1 500 r/min;UN=380 V;Ld=47 mH,Lq=77 mH;Ψf= 0.112 Wb,Rs=0.885 Ω。
4.2 传统LCI 启动性能仿真
由静止状态至切换转速的低速启动段采用断续换流方式,超过切换转速的高速段采用自然换流方式,负载转矩TL=10 N·m,两种换流方式的切换点定在300 r/min,同时换流超前角由γ0=0°变为γ0=60°。仿真结果如图6所示,其中图6a 为启动过程电机转速波形;图6b 为启动过程的电机转矩特性;图6c 为自然换流运行时的绕组电流波形。
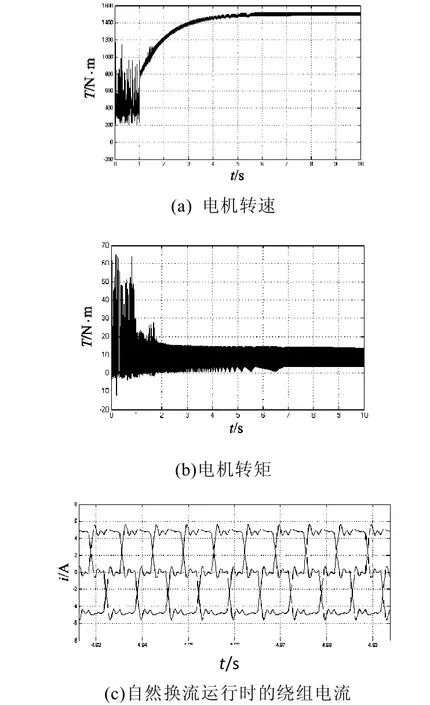
图6 LCI 软启动仿真结果 Fig.6 Soft start simulation results of LCI
由仿真结果可见:低速断续换流持续时间约为1 s,之后进入自然换流运行区,约5 s 达到额定转速并能够拖动10 Nm 负载持续稳定运行;断续换流期间脉冲电流造成转矩波动很大,并使得转速较大波动;自然换流运行期间,绕组电流、转矩及转速波动均相对较小。
4.3 VSI/LCI 启动性能仿真
负载转矩为5 N·m,给定转速为1 500 r/min,VSI 将电机拖至300 r/min 后切换至LCI 运行,负载转矩初始为零。仿真结果如图7所示。
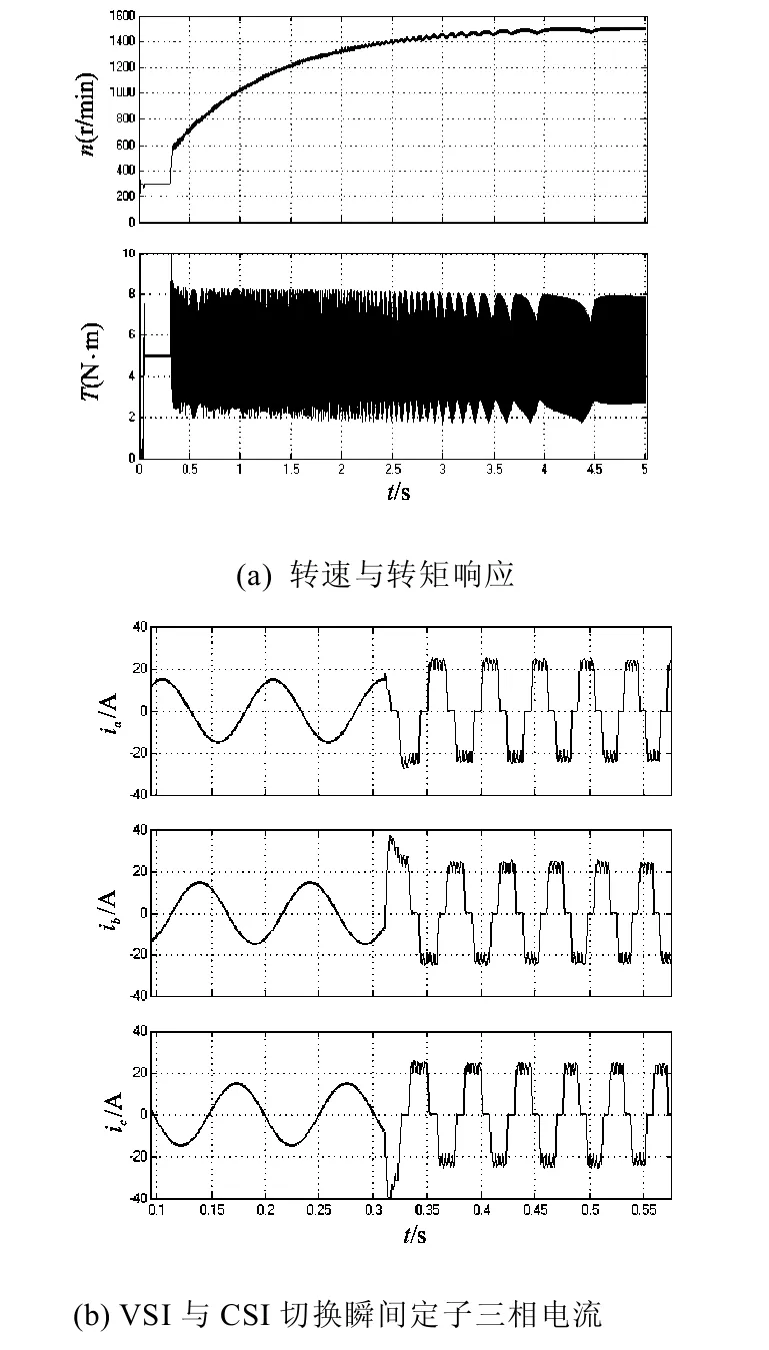
图7 VSI/LCI 仿真波形 Fig.7 Simulation results of VSI/LCI
由仿真结果可知:软启动过程耗时5 s 完成,VSI 在低速起动阶段转速响应快速、转矩平稳,将电机拖至300 r/min;VSI 到LCI 切换前后定子电流较为平滑且没有大的波动。可见,VSI/LCI软起动低速性能明显优于传统LCI。
自然换流后,因LCI 工作在120°导通模式,电磁转矩存在一定波动,幅度相对VSI 较大,但是远小于断续换流过程的波动幅度。
5 结论
LCI 采用晶闸管功率器件,硬件成本较低,在驱动大功率LSPMSM 启动时具有较高的性价比优势。低速运行区采用断续换流方式导致很大的转矩和转速波动,严重影响LSPMSM 的启动性能。
在低速区,以矢量控制方式的VSI 替代断续换流方式的LCI,因转矩电流分量实时精确可控,可有效提高负载能力和转矩响应速度并降低转矩和转速波动。高速自然换流时LCI 采用120°导通方式,存在一定的转矩脉动,性能略差于VSI,但其成本相对较低且可靠性较高。VSI 仅需低压全控型功率器件和霍耳元件作为位置传感器,成本较低。总体来说,VSI/LCI 组合供电是一种极具性价比的LSPMSM 软启动解决方案。
[1] 赵猛,邹继斌,胡建辉,等.异步起动永磁同步电动机起动特性研究[J].电工技术学报,2007,22(7):145-149.
[2] Qin Fen Lu,Yun Yue Ye.Design and Analysis of Large Capacity Line-start Permanent-magnet Motor [J].IEEE Trans.on Magnetics,2008,44(11):4417-4420.
[3] Claudia A.da Silva,José R Cardoso,Renato Carlson.Analysis of a Three-phase LSPMM by Numerical Method [J].IEEE Trans.on Magnetics,2009,45(3):1792-1795.
[4] Ding Tingting,Noureddine Takorabet,Francois-Michel Sargoset al.Design and Analysis of Different Line-start PM Synchronous Motors for Oil-pump Applications [J].IEEE Trans.on Magnetics,2009,45(3):1816-1819.
[5] 卢伟甫,刘明基,罗应立,等.自起动永磁同步电机起动过程退磁磁场的计算与分析[J].中国电机工程学报,2011,31(15):53-59.
[6] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
[7] Antonio Ginart,Rosana Esteller,A.Maduro,et al.High Starting Torque for AC SCR Controller [J].IEEE Trans.on Energy Conversion,1999,14(3):553-559.
[8] 赵凯岐,王毅,徐殿国,等.晶闸管控制的感应电机中提高起动电磁转矩的一种新策略[J].中国电机工程学报,2004,24(3):145-150.
[9] Chandana P.D.Perera.Frede Blaabjerg,John K Pedersen,et al.A Sensorless ,Stablev/fControl Method for Permanent-magnet Synchronous Motor Drives [J].IEEE Trans.on Industry Applications,2003,39(3):783-790.
[10] 孙旭东.大容量同步电动机的软起动控制[J].清华大学学报,1999,39(9):22-25.
[11] 董世华,仲明振,章秀珍,等.48 MW 大型同步电动机静止变频起动装置自动控制系统[J].电气传动,1997,27(1):30-33.
[12] 赵相宾.基于静止变频调速系统的抽水蓄能机组起动研究[D].天津:天津大学,2007.
