追越状态下船舶临界失控水动力干扰区研究*
2013-06-19徐言民裴金林关宏旭
徐言民 裴金林 杨 柯 刘 强 关宏旭
(武汉理工大学航运学院1) 武汉 430063) (长江航道规划设计研究院2) 武汉 430011)
船-船、船-桥水动力干扰是导致船-船、船-桥碰撞等水上交通事故发生的主要诱因之一.随着船舶尺度的增大和船舶速度的提高,通航水域尺度相对减小,发生船-船、船-桥干扰的可能性增大,船-船、船-桥干扰对船舶操纵运动的影响也相对更加明显,发生水上交通事故的概率逐步增大,对通航环境构成潜在的安全隐患,是水上交通安全领域研究的一个重要内容,也是新的研究方向[1].目前国内外学者针对船舶安全航行的研究主要分为以下几个方面.从船舶运动状态而言,主要集中在受控和失控2种运动状态[2-3].从研究水域看,主要集中在开阔水域和受限水域,几年来针对受限水域的研究较为集中,尤其是船间水动力干扰研究领域,包括受限水域船间效应仿真、浅水中会遇船舶水动力作用、船-船非定常水动力相互作用数值计算等[4-8].但是介于受控和失控运动状态之间的欠控运动和由于欠控运动导致的船舶临界失控区等研究领域,尚未开展深入研究.本文将利用船舶操纵运动模型和船间水动力干扰模型,研究船舶发生欠控运动的条件,分析船舶临界失控区的影响因素以及影响规律.
1 问题提出
当2船靠近航行时,由于船间水动力干扰作用的存在,会导致船舶偏航或产生转头现象,随着船舶横向间距和纵向间距的进一步缩小,在特定情况下可能会产生船舶横向力和转船力矩不足而导致船舶在现有控制条件下无法完全控制船舶采取避让措施的现象,即船舶临界失控.这种船舶在有效的控制条件下,缺乏安全的船-船避让条件或船舶避让空间的船舶航行状态称为欠控运动.根据《国际海上避碰规则》,船舶欠控运动应该是介于受控和船舶失控之间的一种临界状态.
2 数学建模
2.1 船舶运动和船-船干扰系统坐标系
建立图1所示船舶运动和船船干扰系统坐标系.

图1 船间干扰运动坐标系统
2.2 船舶临界失控水动力干扰数学模型
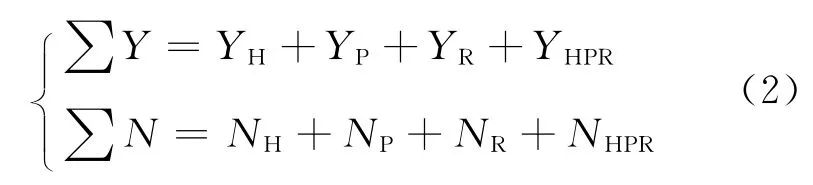
造成船舶临界失控的主要诱因来自船-船横向干扰力和转船力矩,船舶临界失控条件可描述如下.

式中:∑Y,∑N 为船舶横向控制力、转船力矩;YHI,NHI为 船间水动力横向干扰力,转船力矩.
2.2.1 船舶控制力和力矩数学模型
式中作用于螺旋桨上的流体动力YP和力矩NP,船、桨、舵干扰力YHPR和力矩NHPR忽略不计.根据船舶操纵运动数学模型,求解过程如下.
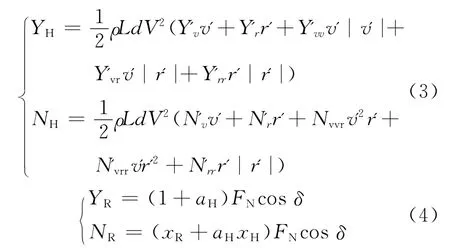
式中:aH为船体力增额系数;xR为舵力中心坐标;xH为船体流体力中心坐标;FN为舵流体正压力
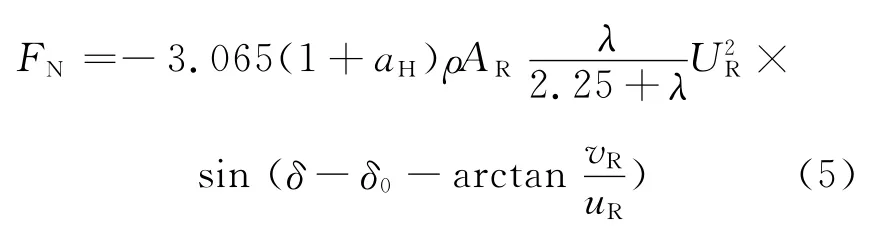
式中:AR为舵面积;λ为舵的展弦比;UR为舵处的有效来流速度;aR为有效冲角.
2.2.2 船-船水动力干扰通用模型[9]本文采用Varyani & Vantorre提出的船间水动力干扰通用公式计算船间水动力干扰效应.表1为船-船水动力干扰通用模型参数表.

式中:滤波参数的选取参见文献[1].
表1 船-船水动力干扰通用模型参数列表
3 追越状态船舶临界失控水动力干扰区分析
3.1 计算船舶
本文采用集装箱船和散货船作为模型开展研究.具体船舶尺度见表2.

表2 船舶尺度
3.2 计算工况
选取h/T、船舶横向间距Sp(0~2)L、船舶速度作为工况组合,具体计算工况见表3、表4.

表3 h/T 对船舶临界失控区影响计算工况

表4 船舶速度对船舶临界失控区影响计算工况
3.3 追越状态船舶临界失控区计算结果
对满足式(1)的船间水动力干扰区和力矩干扰区计算结果分别绘图,以分析船舶临界失控区的相应特征.各工况下的船舶临界失控水动力和力矩干扰区见图2~5.
1)h/T 对追越船和被追越船临界失控区的影响,见图2~3.
图2 h/T 对追越船临界失控区的影响

图3 h/T 对被追越船临界失控区的影响
2)速度对追越船和被追越船临界失控区的影响,见图4~7.

图4 追越船速度变化对追越船欠控区的影响
4 研究结论
图5 被追越船速度变化对追越船欠控区的影响

图6 追越船速度变化对被追越船欠控区的影响

图7 被追越船速度变化对被追越船欠控区的影响
1)追越船转船力矩失控区在(-0.6~-0.5)L,追越船速度提高,临界失控干扰区尺度减小;欠控区随着h/T 的增大而逐步减小;追越船临界失控区尺度随本船速度的提高而减小,随被追越船速度的降低而减小;
2)被追越船干扰力临界失控区在(-1~1)L,转船力矩失控区域在船尾方向(-0.5~0.5)L.欠控区随着h/T 的增大而逐步减小;临界失控区随本船速度的提高而减小,随追越船速度的降低而减小.
5 结束语
通过船舶操纵运动数学模型和船间水动力干扰数学模型建立了船舶由于水动力干扰导致的临界失控模型,并针对h/T、横向间距、船舶速度组合工况开展了计算分析,得到了船舶临界失控区的范围和临界失控区随各参数的变化规律.研究成果对水域船舶安全监管和船舶驾引人员快速估算重点干扰区域有重要意义.
[1]徐言民.基于操纵模拟的桥区水域船舶通航安全预控研究[D].上海:上海交通大学,2010.
[2]甘浪雄,喻 晓,高国章.船舶失控应急的港珠桥区水域尺度[J].中国航海,2011,34(3):76-80.
[3]郑元洲 桥区水域船舶失控船桥碰撞应急操纵技术研究[D].武汉:武汉理工大学,2010.
[4]孙 媛.船间水动力干扰模型的对比与优化研究.[D].武汉:武汉理工大学,2012.
[5]徐言民,刘明俊,邹早建.桥区船舶运动轨迹数值模拟与实船试验对比研究[J].武汉理工大学学报,2008,32(3):573-576.
[6]范平易,邹早建,汪 淳.基于桥区水流数值模拟的桥墩对通航影响分析[J].中国航海,2010,33(1):37-41.
[7]李学东.受限水域船间效应与仿真[D].大连:大连海事大学,2010.
[8]张晨曦.船-船非定常水动力相互作用数值研究[D].上海:上海交通大学,2011.
[9]VARYANI K S,SOURCE V M.New generic equation for interaction effects on a moored containership due to a passing tanker[J].Journal of Ship Research,2006,50(3):278-287.