雷达回波的杂波分析与系统改进
2013-06-10柳桃荣高新成
柳桃荣,高新成
(华东电子工程研究所,合肥 230088)
0 引 言
研究杂波特性是提高雷达在强地(海)杂波中检测能力的极其重要的手段[1],只有对雷达的杂波环境特征有了较为全面的了解,才能采取较为匹配的杂波抑制模式,以提高目标在杂波环境下的检测概率。分析杂波剩余产生的原因,可以为提高雷达整机性能提供有力的参考,引导雷达各分系统的设计改进方向。作者在北京城附近某低空雷达上采集到实际回波数据,针对该雷达画面剩余较多以及方位向的拉环现象进行分析,同时根据分析结果提出雷达技术上的改进措施。
1 采集数据说明
信号形式:63 位相位编码;重复频率:630 Hz 等T;变频控制:2450;天线极化:线极化;天气情况:采集前两天一直下小雨,采集前一天晴天,采集时晴天少云。
采集时拍摄的上波束原始回波画面,如图1 所示;采集的下波束数据恢复的原始视频,如图2 所示。由于拍摄的照片和采集数据的时刻不同,两图的原始画面有一定的差异。


已知城市杂波的先验信息,距离:40 km ~100 km;方位:180° ~190°,选取天线停在185°时的数据作进一步的分析。
2 雷达画面杂波剩余分析
该地面雷达的京石高速公路实际杂波信号的脉压输出三维立体图,如图3 所示,方位向是指不同的重复周期。对该地面雷达的实际回波进行了杂噪比分析。

图3 脉压后的输出信号三维立体图
第2158 距离单元(离雷达阵地大约60 km)1600个重复周期的脉压输出波形,如图4 所示。第2158 距离单元脉压输出复信号频谱,如图5 所示。


从图4 中可以看出该距离单元在1600 个重复周期内的幅度起伏仅为75.55 dB ~75.8 dB,变化范围约0.25 dB,是比较平稳的。脉压输出的噪声电平约10 dB,最大杂噪比为65.8 dB。
图5 的横坐标是频率点,1600 对应的是630 Hz。从第2158 距离单元的脉压信号的频谱可以看出主峰的杂噪比高达80 dB,但该强杂波的中心频率在零频,3 dB 带宽仅为0.4 Hz,而滤波器对这样的杂波改善因子是够的。对于谱宽为19 Hz(横坐标从0 ~40)的杂波,其强度仅为20 dB、50 dB、70 dB 加权的滤波器的改善因子也是足够的。为了定量分析,对该点杂波分别采用不同的滤波器进行了输出杂噪比的分析比较,对第2158 距离单元采用8 点MTD 不同深度加权的输出杂噪比,见表1;70 db、50 dB 频响曲线分别如图6、图7 所示。选取不同重复周期,第2158 距离单元(图10 中的杂波幅度最大值点)共1600 fr 数据,分别采用70 dB 和50 dB 的滤波器的权系数作不等旁瓣加权8 点FIR 滤波。

表1 70 dB、50 dB 不等旁瓣加权求模输出杂噪比


从表1 中不同加权的滤波器输出杂噪比数值上可以看出,每个滤波器有大约8 dB 左右的剩余,而且高达95 dB 以上改善因子的70 dB 加权的滤波器输出杂噪比没有比改善因子63 dB 的50 dB 加权的滤波器输出杂噪比有明显的减小,而且有的频道输出甚至变大。为了进一步分析这个原因,考虑降低天线转速,增大CPI 内脉冲数到16 个,提高滤波器的改善因子,增大滤波器零频附近的凹口宽度到23 Hz,设计了一套滤波器,其频响曲线如图8 所示。
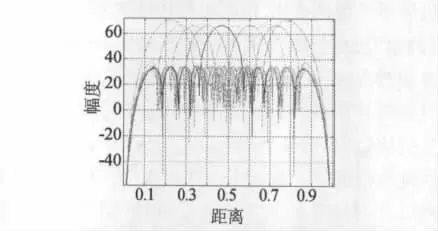
图8 16 点70 dB 加权的滤波器频响曲线
按照迭代运算设计的一套滤波器,预定频率点为0.037fr=23.3 Hz。用该组滤波器分析第2158距离单元的杂波,滤波器各通道输出的杂噪比,见表2。

表2 16 点70 dB 加权的滤波器输出杂噪比
通过表1、表2 可以看出无论是加大预定频率点,增大零频附近的凹口宽度,还是增大衰减旁瓣,还是增大脉冲数、提高改善因子等措施,对滤波器的输出杂噪比没有改善。而一味的增大滤波器在零频附近的改善因子,或压低滤波器旁瓣,可能带来对信噪比的损失及滤波器频率覆盖范围的减小,对目标检测带来不利的影响。
远区噪声信号的脉压输出信号频谱,如图9 所示;第2158 距离单元杂波信号的脉压输出信号频谱,如图10 所示。

图9 远区噪声信号的脉压输出信号频谱

图10 第2158 距离单元杂波信号的脉压输出信号频谱
通过图9、图10 可以看出分析得出这是由于前端接收机等改善因子的限制,使信号整个通带内的幅度抬高了近8dB,这是信号处理无法对消的。因此,要抑制强杂波必须要求系统有足够的改善因子,单纯提高某个分系统的改善因子是无效的。
分析认为地物杂波强度过强,动态不够,致使限幅或改善因子不够,从而在画面的固定区域里,产生帧间相关性强的剩余点。
3 雷达技术上的改进措施
针对2 中雷达杂波剩余有以下改进措施。
改进措施1:扩大接收机动态范围,增加接收机A/D 输出有效位数。
接收机动态范围[2]表示接收机能够正常工作所容许的输入信号强度范围。信号太弱,不能检测出来;信号太强,接收机会发生饱和过载。增大接收机A/D 输出有效位数,可以保证强信号接收机不会发生饱和,同时能保证后续信号处理对小信号的检测能力。避免送到信号处理的信号失真导致目标检测概率降低、虚警概率增大,系统改善因子下降。

式中,Uimax为最大可检测信号电压;Uimin为最小可检测信号电压。
增大接收机A/D 输出有效位数可用下式来表示:

其中SNR 是均方根信号幅度和A/D 变换器均方根噪声功率的比值。
下面是接收机A/D 输出有效位数对系统强信号和弱信号检测性能的影响的仿真分析。
目标数量:2 个;信号形式:线性调频信号;信号带宽:2 MHz;目标所在距离:15 km、75 km;信噪比:48 dB 、-20 dB;多谱勒频率为125 Hz;系统采样率:10 MHz;系统重复频率:500 Hz。
弱目标和大目标分别通过8 位A/D 和信号处理的脉冲压缩和FFT 处理后的结果如图11、图12 所示。


2 批目标分别通过16 位A/D 和信号处理的脉冲压缩和FFT 处理后的结果,如图13、图14 所示。


比较上述4 幅图,可以看出,16 bit 的A/D 系统对强、弱目标能更好的兼顾,而8 bit 的A/D 系统在保证强信号不饱和的条件下无法兼顾弱信号检测性能,对系统的小信号检测能力有较大影响。
改进措施2:扩大接收机动态范围,增加灵敏度时间控制(STC)、数字自动增益控制(DAGC)功能,完成对接收机动态控制。
为了防止强信号引起的过载,需要增加接收机的动态范围,就必须有增益控制功能。由于杂波干扰(如地物杂波和海浪杂波)主要出现在近距离,干扰功率随着距离的增加而相对平滑地减小。STC 增益控制的基本原理是:当发射机发射信号之后,接收机产生一个与干扰功率随时间变化规律相匹配的控制电压,控制接收机按照该规律变化,它可以使接收机不致受近距离的杂波干扰而过载。STC 控制曲线,如图15 所示。

图15 STC 控制曲线
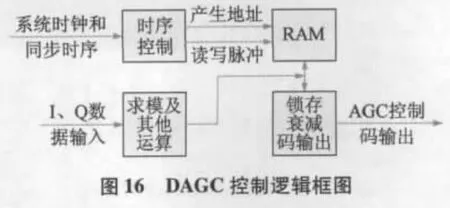
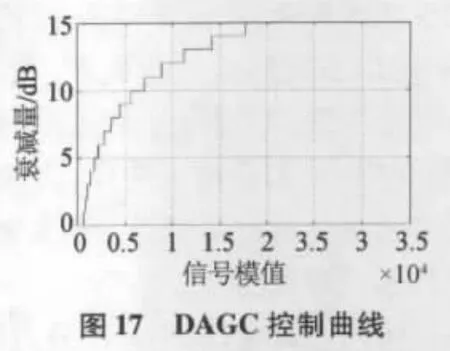
采用DAGC 即数字自动增益控制作为一种防止接收机饱和的措施,将在暂停脉冲内的最后一个脉冲产生一次全距离的衰减码,最大衰减控制范围的衰减量30 dB;根据衰减后的各距离单元幅度值决定各单元的衰减码,存入RAM 中,作为该CPI 内以后所有脉冲的衰减码。16 bitI、Q 信号求模后的动态为15 bit,即80 dB,若衰减后的分贝数为A,则应该的衰减量为A-(80 -30)dB;若为负值,则作0 衰减。其实现的原理框图,如图16 所示;控制曲线如图17 所示。
改进措施3:增加匿影天线和匿影接收通道[5],在信号处理完成副瓣匿影判别功能,消除强杂波通过天线副瓣导致的杂波剩余。
旁瓣匿影针对的是强副瓣杂波虚警,在天线的双程旁瓣电平达到一定水平后,旁瓣杂波一般不会影响到目标的检测,但一些强反射点如铁塔、金属桥梁、大船或船队会具有很大的等效RCS,其回波即使从天线的旁瓣进入接收机也足够强,于是就把它当成目标点检测出来了,在显示画面上可以看到在方位上形成拉环现象,这就是旁瓣杂波虚警。
可以采用旁瓣匿影的方法来解决这个问题。引入辅助天线和辅助接收通道,天线是全向的,在正常情况下,由于其天线的合成增益大,主波束回波一般都比辅助通道的接收信号强。但对旁瓣回波而言,主通道接收旁瓣电平较低,所以其输出信号会低于辅助通道接收信号。这样,根据主通道和辅助通道接收的信号强度来判别是否是旁瓣回波。为了避免副瓣方向来的强干扰信号对画面质量和测向的影响,需要设计一个或多个副瓣匿影天线,其增益应高于主天线副瓣增益,以使得匿影通道能正确判决信号是否从副瓣进入接收机。副瓣匿影处理流程框图,如图18 所示;主天线和匿影天线仿真图,如图19 所示。


如何减少杂波剩余,降低虚警率,提高目标检测概率,一直是雷达系统的关注的重点。雷达系统总的杂波改善因子受限的因素有:系统稳定度、接收机动态、A/D 量化噪声、雷达重频选择、滤波器优化设计等。现代雷达设计通常采用以下技术来提高复杂杂波环境下目标检测性能。
·提高系统瞬时带宽,减小杂波分辨单元,降低杂波强度;
·采用相控阵体制,灵活控制波束位置和驻留时间,提高相干积累得益;
·采用数字波束形成技术,降低对模拟接收机的动态要求,实现大动态数字接收和信号处理;
·采用脉冲多普勒技术[6],提取目标的多普勒速度,实现点迹滤波,减小杂波剩余;
·采用检测前跟踪技术,实现复杂杂波环境下的小目标检测;
·采用雷达参数和滤波器优化设计方法,既达到高的滤波器改善因子又确保低慢小目标的检测性能;
·采用阵地优化技术,实现对杂波虚警的有效控制。
4 结 语
本文针对某雷达杂波剩余大,到雷达站采集了实际回波的A/D 变换器输出的正交I、Q 信号,对剩余较多的杂波区域信号按照实际雷达的信号处理流程进行了仿真处理,并对关注的杂波区域采用不同的FIR 滤波器加权、提高滤波器改善因子等措施,均未得到明显的画面改善效果。分析认为地物杂波强度过强,动态不够,致使限幅或改善因子不够,从而在画面的固定区域里,产生帧间相关性强的剩余点。提出了增加接收机A/D 输出有效位数和增加灵敏度时间控制、数字自动增益功能,完成对接收机增益控制,以扩大接收机动态范围,针对画面的方位向拉环现象,提出了增加匿影天线和匿影接收通道,在信号处理完成副瓣匿影判别功能,消除强杂波通过天线副瓣导致的杂波剩余。这些改进措施在实际雷达上得以实施并取得了满意的效果。
[1] 钟红蕾,柴常春. 雷达的杂波特性及杂波抑制技术[J].信息与电子工程,2005(3):66-71.
[2]夏顺冬.雷达接收机的动态范围[J]. 现代雷达,1996(8):76-82.
[3][美]MERRILL L SKOLNIK. 雷达手册[M]. 王军,等.译.第三版.北京:电子工业出版社,2003.
[4]丁鹭飞,耿富录.雷达原理[M].西安电子科技大学出版社,2001.
[5] FARINA A,GINI F.Calculation of Blanking Probability for the Sidelobe Blanking for Two Interference Statistical Models[J].IEEE Signal Processing Letters.1998,5(4):98-100.
[6]张大冬,金郁颉. 基于MMSE 准则的自适应脉冲压缩[J].中国电子科学研究院学报,2012,7(4):394-402.
