三相感应电机矢量控制系统滞环控制和SVPWM的对比研究
2013-06-08王军伟
王军伟
(太原重工股份有限公司,太原030024)
0 引言
电气传动装置在国民经济各部门中一直起着举足轻重的作用,随着新型电力电子元器件的快速发展,交流调速性能越来越好,进而交流电机在电力传动中占据了主力地位。近年来,越来越多地学者致力于交流电机变频调速系统的研究,希望能在频率范围、动态响应、调速精度、输出性能等方面有更大的突破。
本文以三相绕线型感应电机为控制对象,根据电机自身的结构特点,将电机定子直接连接至工频电网,转子则由交—直—交变频器供电,采用定子磁链定向矢量控制策略对转子电流的幅值、频率、相位、相序进行控制,从来改变电机定子电压、电流相位,调节无功功率和有功功率。并分别对滞环控制跟踪转子电流和SVPWM跟踪磁链两种手段进行了研究,通过对比得出一种两者相结合的控制手段。
1 三相感应电机矢量控制原理
由电机学可知,三相绕线型感应电机在三相静止坐标系中是个多变量、强耦合、非线的电机系统,建立其数学模型非常复杂,求解困难。按照矢量控制原理,参照直流电机控制方式,在两相同步旋转MT坐标系上建立其数学模型,将其转化为线性、解耦的控制模型,从而找出三相感应电机的控制策略。
1.1 感应电机在MT坐标系下的数学模型
为方便起见,电机定子侧各变量用下标1表示,转子侧各变量用下标2表示。三相绕线型感应电机在两相旋转坐标系下的电压方程如式(1)、(2)所示:

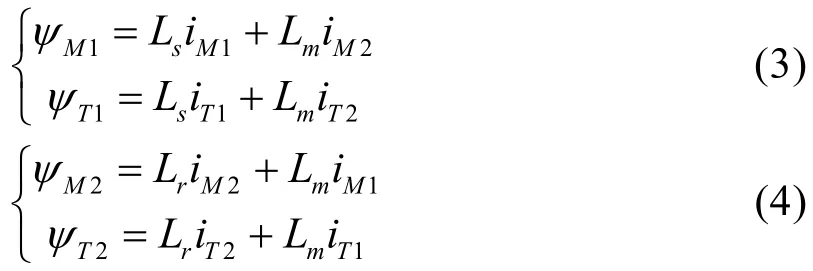
磁链方程如式(2)、(3)所示:
转矩方程如式(5)所示:

有功功率和无功功率如式(6)所示:

其中:下标MT分别表示各变量在M轴和T轴上的分量;u表示电压;i表示电流;Ψ表示磁链;R表示电阻;L表示电感;ω1表示定子磁势相对于定子本体的旋转电角速度;ω2表示转子磁势相对于转子本体的旋转电角速度;P为电机极对数;p为微分算子。
1.2 定子磁链定向矢量控制策略
定子磁链定向,即以定子磁链Ψ1作为定向矢量,按照矢量控制的管理,使得MT坐标系的T轴超前M轴90度,M轴与定子磁链Ψ1重合。在实际应用中,定子电阻上的压降一把都较小,可忽略不计,即R1=0。由以上可得:


进一步可得出定子、转子电流相互关系如式(9)所示:

将式(8)代入式(6)可得:

由上可知,可以通过控制定子的电流的T轴分量来控制转矩(有功功率),进而可控制转速。可以通过控制定子电流的M轴分量来控制无功功率。但由于三相感应电机定子接在工频电网无法直接控制,由式(9)可知,我们可以通过控制转子的MT轴电流分量来实现转速和无功功率的控制。
2 三相感应电机矢量控制模型仿真
本文在Simulink中建立了三相感应电机的矢量控制系统,分别采用滞环控制和SVPWM两种控制手段,都实现了对电机转速和功率因数的控制。
2.1 电流滞环控制
电流跟踪逆变器是PWM控制方式中的一种,它使得输出电流跟随给定电流波形变化,一般都采用滞环控制,即当逆变器输出电流与给定电流的偏差超过一定值时,改变逆变器的开关状态,使逆变器输出电流增加或减少,将输出电流与给定电流的偏差控制在一定范围内。
采用滞环控制的三相感应电机矢量控制模型框图如图1所示。
三相感应电机带负载启动,在0.2 s切换投励开关,变频器给电机转子供电,在1 s时刻,设定转速由低同步速700 r/min变为超同步速800 r/min,在1.5 s时刻,功率因数由0.7变为0.95,仿真转速波形、功率因数波形和转子电流波形分别如图2、图3、图4所示:
如图可见,采用滞环控制能得到较好的控制效果。逆变器输出电流(即转子电流)跟踪效果与环宽成反比关系,环宽越小,效果越好,但逆变器的开关频率将更大,开关损耗也更大,所以在实物系统中,选择合适的环宽是至关重要的。
2.2 电压空间矢量技术(SVPWM)
在众多正弦脉宽调制技术中,空间电压矢量pwm(或称svpwm)是一种优化的pwm技术,其优点明显,已有取代传统spwm的趋势。本文在三相感应电机调速系统中采用了SVPWM控制手段,并在Matlab中验证了其可行性。
采用SVPWM控制的三相感应电机矢量控制模型框图如图2所示。
三相感应电机带负载启动,在0.2 s切换投励开关,变频器给电机转子供电,在1.5 s时刻,设定转速由低同步速700 r/min变为超同步速800 r/min,在1 s时刻,功率因数由0.75变为0.95,仿真转速波形、功率因数波形和转子电流波形分别如图6、图7、图8所示。



通过分析可知, svpwm是一种优化的pwm技术,能明显减小逆变器输出电流的谐波成分及电机的谐波损耗,降低脉动转矩,且其控制简单,数字化实现方便,电压利用率高。
3 总结
从对两种控制手段的原理分析及仿真结果来看,都能取得不错的控制效果,相对于滞环控制而言,SVPWM控制是由于采用跟踪圆形磁场的方法来控制逆变器开关动作,使得对直流侧电压的利用率更高,而且计算简单,减少了开关损耗,进而减少了谐波损耗,从而降低了转矩脉动。但两种控制方法都存在自身的缺陷。在使用滞环控制方法时,开关频率不固定,会影响后期的滤波处理,甚至在频率过高时烧毁器件,在实际应用中一般都采用滞环控制和恒频技术相结合的定时滞环控制。定时滞环控制虽然解决了频率不固定的缺点,但在某些特殊点仍然会影响电流的跟踪精度。SVPWM有较好的效果,但在单独使用时,在不同的扇区开关管都会进行动作,在所需电流增量非常小的时刻,开关管也动作,且导通时间很短,在精度要求不是特别高的场合,相当于多余的开关动作,增加了开关损耗,使得死区对控制效果的影响增大。
结合两种控制方法的优缺点,笔者提出一种将电流滞环与空间矢量相结合的控制方法。即先进行一个越界判断,根据系统实际情况取一个误差允许值,当三相电流的增量都在误差允许范围之内,则采用滞环控制,保持上个周期的开关状态不变。否则,采用SVPWM控制法,计算新的开关管序列,改变开关管状态。这样就能尽可能地减少开关动作次数,降低开关损耗及死区控制带来的影响,从而得到较理想的控制效果,在实际应用中也有了重要的意义。


[1] 张超. 基于DSP三相感应电机控制[M]. 沈阳理工大学硕士论文, 2009,12.
[2] 谢庆国, 赵金. 三相感应电机的稳定性分析[J]. 控制理论与应用, 2002, (6).
[3] 张超, 段智敏. 基于单神经元的三相交流异步电机控制系统仿真研究[J]. 自动化技术与应用,2009,28(10).
[4] 王兆安, 黄俊 主编. 电力电子技术[M]. 北京: 机械工业出版社,.2006.
[5] 杨耕, 罗应立 编著. 电机与运动控制系统[M]. 北京: 清华大学出版社, 2006.
[6] Zhang Chun-jiang; Wang Yong; Li Ya-Zhen; Kan Zhi-Zhong. Research on decoupling control and low voltage ride-through of a double-fed wind power system. Power Electronics and Motion Control Conference, 2009. IPEMC apos;09. IEEE 6th International Volume , Issue , 17-20 May 2009 Page(s):2244 - 2248.