基于大地直角坐标系的瞄星法的研究
2013-06-08陈波
陈波
(中国船舶重工集团公司江苏自动化研究所,江苏 连云港 222061)
0 引言
在舰载武器系统中,光电、跟踪雷达和武器等设备在舰艇上的安装位置通常不同,因此系统零位不一致,而系统零位一致性是保证舰载武器系统高射击精度的前提条件。为满足高精度舰载武器系统的射击精度的要求,需要对系统内的高精度传感器和武器等设备的机械零位和电气零位进行对准,其中角度电气零位对准主要采用瞄星法[1]。
传统瞄星法是一种基于舰艇甲板直角坐标系的方法。该方法以各设备安装平面直角坐标系与舰艇甲板直角坐标系平行为前提,将参加瞄星的各设备测得的星体相对各设备安装平面直角坐标系的角度值与基准测量设备测得的星体相对舰艇甲板直角坐标系的角度值进行比较、修正,进行系统的电气零位一致性对准。对于大多数以舰艇甲板直角坐标系为参考坐标系来进行控制的舰载武器系统,该方法计算简单直接。所以,该方法一直作为舰载武器系统电气零位对准的标准瞄星法沿用。但在实际工程实践中,因为各设备安装平面直角坐标系与舰艇甲板直角坐标系通常并不能确保平行,传统瞄星法在系统电气零位对准的精度方面存在着一定的局限性。这两个坐标系不能确保平行的原因主要有:(1)现在轻质船的船体刚性强度较低,容易出现一定的形变;(2)参加瞄星的传感器和武器等设备的水平度均采用机械调整方式,精度较低,只能保证在安装水平度指标范围内(通常在2'~3')。
为了提高瞄星法进行武器系统电气零位对准的精度,提出了一种瞄星改进方法——基于大地直角坐标系的瞄星法。该方法充分考虑了设备安装平面与舰艇甲板平面不平行的可能性,提高了武器系统零位对准的精度。
1 瞄星法的工作原理与坐标系定义
1.1 瞄星法的工作原理
舰载武器系统各设备的对准实际上就是将各设备的舷角和仰角的零位分别修正到与舰艏艉线和基准平面保持平行(误差满足精度要求)[2]。因各设备本身不具备直接测量准确舷角和仰角的功能,故需要借助基准测量设备经纬仪来测量某一点相对于经纬仪所设定的平面和零位中线的仰角值和舷角值作为真值参考。
在舰体上经纬仪架设位置与各设备安装位置不同(包括水平距离和高低落差)。在对准计算中,如果考虑位置的不同,则对各设备、经纬仪及其他测量工具的距离和角度测量精度要求很高,实施较为困难;如果不考虑位置的不同,观测目标至少需要在57 km 以外(假设经纬仪与设备之间的距离为20 m,当观测目标距离为57 km时,最大误差为arc sin(20/2/57000)°,即0.01°)。但是,57 km 远的地面目标即使有足够的亮度,也超出了视距范围,所以星体作为亮度足够亮、距离足够远、可视面积足够小的天体点目标是最合适的选择[3]。
瞄星测量时,需保证经纬仪与各设备水平零位在相互平行的平面上(各平面与舰体基准平台平面平行)。因为星体距离相对于经纬仪与武器系统内各设备之间的距离可以近似认为无穷远,所以可以认为经纬仪与各设备观察视线相互平行,故经纬仪观测值可以作为各设备舷角和仰角真值。瞄星法巧妙地规避了经纬仪及舰载武器系统内各设备在舰体上分布位置不同这一重要因素,可以很好地满足高精度舰载武器系统角度电气零位对准精度要求。
1.2 坐标系定义
1.2.1 大地直角坐标系
原点在测量仪器或被测设备安装平面上转轴中心点位置处,X 轴指向在大地水平面上沿舰艏方向顺时针旋转90°方向,Y 轴指向舰艏方向,Z 轴指向天顶方向。
1.2.2 舰艇甲板直角坐标系
原点在测量仪器或被测设备安装平面上转轴中心点位置处,X 轴指向舰正右舷90°方向,Y 轴指向舰艏方向,Z 轴垂直于X-Y所成的平面并指向甲板上方。
1.2.3 设备安装平面直角坐标系
原点在测量仪器或被测设备安装平面上转轴中心点位置处,X 轴指向各设备安装平面上沿舰艏方向顺时针旋转90°方向,Y 轴指向舰艏方向,Z 轴垂直于XY所成的平面并指向甲板上方。
2 基于舰艇甲板直角坐标系的瞄星法
为适应舰艇航行姿态变化快的特点,大多数舰载武器系统解算与控制的参考坐标系均选取舰艇甲板直角坐标系,所以基于舰艇甲板直角坐标系的瞄星法计算相对简单直接。
在基于舰艇甲板直角坐标系的瞄星法中,首先将参与瞄星的跟踪传感器和武器的水平度调整至与舰基准平台平面平行(误差满足武器系统指标要求);然后将经纬仪的测量平面调整至与舰基准平台平面平行,并将此状态确定为经纬仪仰角测量零位,同时将经纬仪中线与舰艏艉线对准,并将此状态确定为经纬仪舷角测量零位。通过调平工作,即可认为跟踪传感器、武器及经纬仪的平台平面均平行于舰基准平台平面(即舰艇甲板坐标平面)。此时,当参与瞄星的跟踪传感器、武器及经纬仪同时对准星体时,根据瞄星法工作原理,其观测舷角值、仰角值应相同,即经纬仪对星体的测量值可作为在舰艇甲板直角坐标系下跟踪传感器与武器对星体测量值的真值[4]。
3 基于大地直角坐标系的瞄星法
3.1 工作原理
在基于大地直角坐标系的瞄星法中,首先,同基于舰艇甲板直角坐标系的瞄星法一样,将跟踪传感器和武器安装平面调整至与舰艇甲板平面(即舰基准平台平面)之间平行度满足武器系统对各设备水平度指标要求。然后将经纬仪的测量平面调整至与大地平面平行。调整完毕后,参与瞄星的跟踪传感器、武器和经纬仪按照瞄星法进行瞄星,并分别记录相应数据。由于经纬仪测量数据为以大地直角坐标系为参考坐标系的数据,跟踪传感器和武器测量数据为以各自设备安装平面直角坐标系为参考坐标系的数据,需将以大地直角坐标系为基准的经纬仪测量数据转换到参与瞄星的各设备的安装平面直角坐标系中,供各设备作为真值进行比较修正。在数据转换过程中,需要用到跟踪传感器和武器以大地平面为基准的绝对水平度,重点为沿舰艏艉线的纵向方向和垂直于舰艏艉线的横向方向的绝对水平度,这些数据通过水平仪测量得到。
以图1为例具体说明一下该方法。经纬仪在大地直角坐标系下,分别瞄星测得舷角与仰角真值为α2、β2。参与瞄星设备在各设备安装平面直角坐标系下,分别瞄星测得舷角与仰角值为ε、ζ。经坐标系转换计算,将基于大地直角坐标系的舷角与仰角真值转换为基于各设备安装平面直角坐标系的舷角真值α1和仰角真值β1。具体转换公式将在3.2节具体说明。
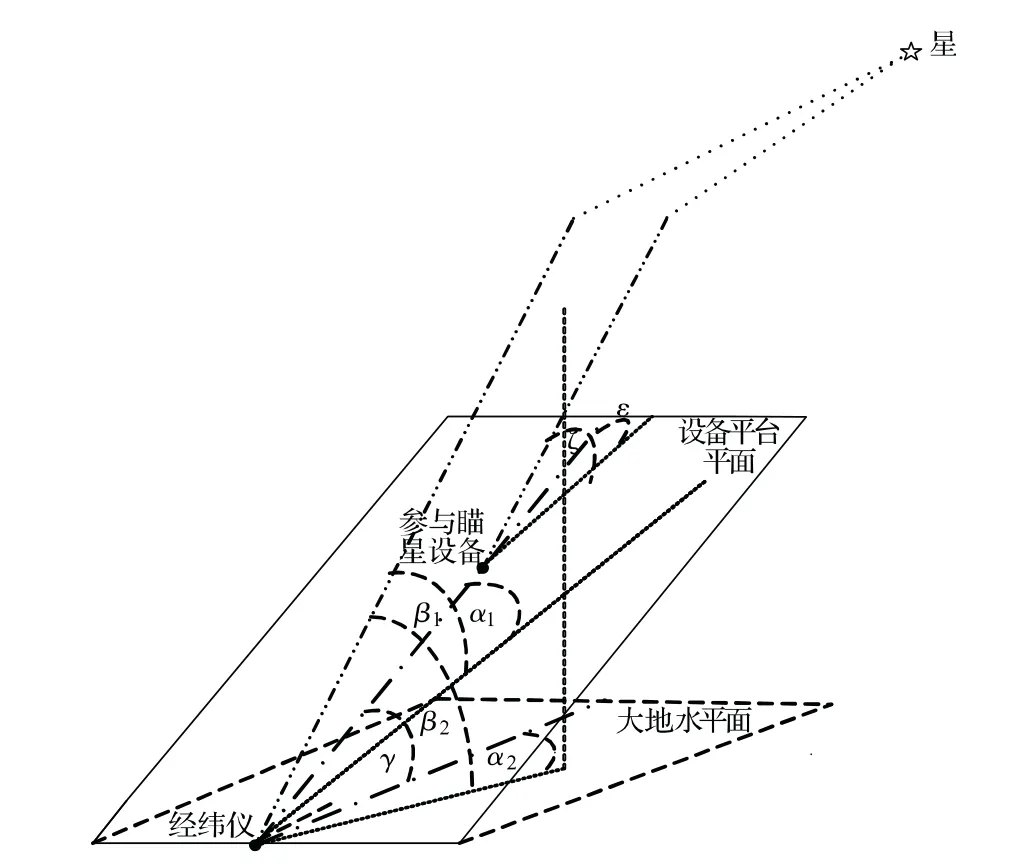
图1 基于大地直角坐标系的瞄星法工作原理示意图
基于大地直角坐标系的瞄星法的优点为:(1)瞄星过程中,不涉及舰艇甲板直角坐标系,从而有效消除了基于舰艇甲板直角坐标系的瞄星法中,船体甲板平面刚性变形对武器系统角度零位对准的影响。(2)采用水平仪直接测量跟踪传感器和武器平台平面相对于大地水平面的绝对水平度,从而有效消除了基于舰艇甲板直角坐标系的瞄星法中各设备安装平面与舰艇甲板平面水平度夹角误差对武器系统角度零位对准精度的影响。(3)充分利用地心引力这一固有物理特性对经纬仪进行大地水平度调平,可以保证经纬仪基准平面与大地水平面平行,从而消除了基于甲板坐标系的瞄星法中经纬仪调整至与舰甲板水平过程中产生的测量误差。
3.2 坐标系转换方法
为了将基于大地直角坐标系的舷角和仰角真值转换为各设备安装平面坐标系的舷角和仰角真值,需建立两个坐标系:一个是大地直角坐标系X0Y0Z0,一个是设备安装平面直角坐标系X3Y3Z3,两个坐标系的原点均定义在载体旋转中心。为完成坐标系转换计算,引入计算坐标系X1Y1Z1及X2Y2Z2,坐标转换过程可通过绕坐标系作三次旋转得到[5]。首先进行坐标系旋转分析,因为在做该项试验时船体一般处于船坞半坐墩状态,所以航向无变化,各设备沿Z0无任何旋转,即X0Y0Z0与X1Y1Z1重合;然后考虑载体绕X1轴转动θ 角,即载体纵轴线与大地水平面有一夹角θ(逆时针为正),最后考虑载体绕Y2轴转动φ 角,即载体横轴线与水平面有一夹角φ(顺时针为正),即

变换式为

C0代表X0Y0Z0绕Z0轴转动为X1Y1Z1坐标系的坐标转换系数,由于绕Z0轴转动角度为0,所以C0=1。
C1代表X1Y1Z1绕X1轴转动θ 角后转变为X2Y2Z2坐标系的坐标转换系数。
C2代表X2Y2Z2绕Y2轴转动φ 角后转变为X3Y3Z3坐标系的坐标转换系数。
C 代表X0Y0Z0转变为XYZ的坐标转换系数。即

设基于大地直角坐标系的舷角γ和仰角δ 转换到设备安装平面直角坐标系后分别为α和β。

经公式(1)转换得到X3、Y3、Z3。

由此可以得出基于大地直角坐标系的舷角γ和仰角δ 到基于设备安装平面直角坐标系的舷角α和仰角β的转换关系。以上坐标转换公式也可通过四元数旋转变换推出。
4 两种瞄星法的精度比较、分析
4.1 比较、分析
基于大地直角坐标系的瞄星法和基于舰艇甲板直角坐标系的瞄星法的精度比较、分析需要从瞄星的全过程进行考虑。
4.1.1 舰甲板平面水平度误差的影响
基于大地直角坐标系的瞄星法,选取大地平面这一稳定绝对水平面为水平基准参考点,并分别测量各设备绝对水平度,因此舰甲板平面水平度对该方法的精度无影响。
基于舰艇甲板直角坐标系的瞄星法,选取甲板平面为水平基准参考点,由于甲板刚性变形等原因,会将甲板变形误差带入舰载武器系统中,其影响精度不易评估。
4.1.2 参与瞄星设备水平度误差
基于大地直角坐标系的瞄星法,设备水平度测量为以大地平面为基准的绝对水平度,其水平度误差仅为水平仪的测量误差。
基于舰艇甲板直角坐标系的瞄星法在对准时认为设备安装平面与基准平面相对水平度为0。但是,实际上设备安装平面是通过机械调平调整到满足武器系统精度要求后,近似认为与基准平面平行。机械调平很难达到真正的水平,通常设备安装平面与基准平面相对水平度只能调整到2'以内。这必然将最大2'的误差带进舰载武器系统精度内。所以,参与瞄星设备水平度误差上,基于舰艇甲板直角坐标系的瞄星法比基于大地直角坐标系的瞄星法多了最大2'的误差。
4.1.3 经纬仪调平精度
基于大地直角坐标系的瞄星法调平充分利用地球重力特性调整经纬仪平面的水泡居中,调平后,经纬仪平面与大地平面水平度误差基本为0。

4.1.4 瞄星过程精度
两种方法瞄星过程相似,精度相当,通常在3'左右。
4.1.5 计算误差
基于舰艇甲板直角坐标系的瞄星法在计算中均在一个平面坐标下完成,不存在计算误差。
基于大地直角坐标系的瞄星法在计算中用到刚体平面坐标系转换,存在计算误差损耗,但其计算误差很小,与测量误差相比可以忽略。
4.2 总 结
基于舰艇甲板直角坐标系的瞄星法中,不考虑甲板变形产生的误差,仅考虑参与瞄星各设备水平度误差及经纬仪调平精度的影响,带入舰载武器系统的仰角零位的误差约为2.05'(水平度误差对舰载武器系统角度零位对准的舷角对准精度影响不大)。另外,基于大地直角坐标系的瞄星法和基于舰艇甲板直角坐标系的瞄星法在瞄星过程中的测量精度相当,通常在3'左右。所以,基于舰艇甲板直角坐标系的瞄星法进行对准的武器系统精度为舷角3'、仰角5.05',如考虑甲板变形等因素(根据工程实践,大多数轻质船甲板变形在2'~3'左右且为工程允许误差范围),其对准精度为舷角3'、仰角7'~8';基于大地直角坐标系的瞄星法进行对准的武器系统精度为舷角3'、仰角3'。
5 结束语
基于大地直角坐标系的瞄星法是一种改进的瞄星法,较好地解决了传统瞄星法进行舰载武器系统角度零位对准时受甲板变形、设备安装平面水平度和测量工具平台水平度影响较大的局限性,明显提高了武器系统角度零位对准的精度。该方法已在某型舰炮武器系统系泊、航行试验和鉴定试验中成功应用,具有较大的推广意义。
[1]顾颖闽,郑剑波,王嘉苏.互瞄法在舰载武器系统电气零位标定中的应用[J].指挥控制与仿真,2010(3).
[2]汪德虎,谭周寿,王建明,白江.舰炮射击基础理论[M].北京:海潮出版社,1998.
[3]丁德勇,康郦,王武成.水面舰艇电子武备基座水平度的检验与修正[J].情报指挥控制系统与仿真技术,2004,26(6):70-73.
[4]戴自立,谢荣铭,虞汉民.现代舰艇作战系统[M].北京:国防工业出版社,1999.
[5]黄守训,等.舰炮武器系统试验与鉴定[M].北京:国防工业出版社,2005.
