多机电力系统最优滑模鲁棒励磁控制
2013-06-07李天云李慧敏于兴林
李天云,李慧敏,于兴林,何 野
(1.东北电力大学电气工程学院,吉林 132012;2.东北电力大学自动化工程学院,吉林 132012)
多机电力系统最优滑模鲁棒励磁控制
李天云1,李慧敏2,于兴林1,何 野2
(1.东北电力大学电气工程学院,吉林 132012;2.东北电力大学自动化工程学院,吉林 132012)
针对多机电力系统非线性以及存在不确定扰动的特点,结合线性二次最优控制与积分滑模控制,设计了一种最优滑模鲁棒控制器。用扩张状态观测器对系统的非线性动态实时估计,通过反馈实现线性化;针对传统最优控制存在的问题,采用积分滑模控制进行处理。所构造的积分滑模面使系统在滑动模态的整个过程中对不确定性具有完全鲁棒性。仿真结果表明,该控制律不但能有效地改善系统在大干扰下的暂态稳定性,而且对不确定扰动有较强的鲁棒性。
多机电力系统;扩张状态观测器;最优滑模;励磁控制;鲁棒性;自抗扰控制技术
发电机励磁控制是改善电力系统稳定性的重要手段。现代电网越来越呈现强非线性、外部干扰严重和耦合性强的特点,使得早期的电力系统稳定器[1]PSS(power system stabilizer)、线性最优励磁控制[2]以及非线性最优励磁控制[3]等基于平衡点附近线性化方法的控制方法只能在一个很小的区域内发挥作用,仅对提高系统的静态稳定性有效。由于忽略了电力系统的非线性特性,所以对于大干扰下系统暂态稳定性的控制效果不是很好。因此设计能够抑制各种不确定性的鲁棒控制器显得尤为重要。
自抗扰控制技术[4]ADRC(active disturbance rejection controller)针对模型的不确定和扰动问题提出了全新的解决方法,扩张状态观测器ESO (extended state observer)是ADRC的主要贡献之一。本文用ESO来对外界扰动和系统的非线性动态进行实时估计,通过反馈将其线性化,简化了非线性控制器的设计。
多机电力系统是一个多维的强非线性动态系统,含有大量的未建模部分,因此有必要采用非线性控制理论设计鲁棒励磁控制器[5~7]。近几十年来,微分几何法以及非线性控制方法取得了长足的进展,已在电力系统中得到应用,但它要求系统的模型精确,不具备对模型和参数不确定性的鲁棒性等。滑模变结构控制[8]作为控制系统的一种综合方法,最突出的优点是滑动模态对系统结构不确定性、参数不确定性及外部干扰具有完全鲁棒性,能成功地解决微分几何存在的问题。因此,滑模变结构控制在电力系统中得到了广泛应用[9,10]。
本文利用ESO和积分滑模控制[11,12]方法,在考虑外加扰动条件下,应用标称系统所对应的代数Riccati方程实现线性最优控制和构造积分滑模面实现鲁棒控制。最后在四机两区系统上进行了大干扰故障时的仿真,验证了该控制器能够有效改善系统的暂态稳定性,并具有较强地抗干扰能力。
1 扩张状态观测器
ESO是ADRC的核心部分之一。它通过非线性函数fhan来设计比系统多一维的观测器,估计扰动量和系统非线性动态。如

对于式(1)的系统,扩张状态观测器为

选择适当的增益系数β01,β02,…,β0n+1观测跟踪系统的各个状态,及扰动zn+1→控制量可取为

2 多机电力系统数学模型
定义系统状态变量为δi、ωi、Eqi′(i=1,2,…,n),并假设机械输入功率Pmi为常数,则系统的数学模型可以表示[13]为

基本方程为

将系统方程换成易于测量的状态量表示的数学模型为
式中:δi为发电机功角;ωi为发电机转子角速度;ω0为同步角速度;Hi为惯性时间常数;Di为阻尼系数;Pei为发电机输出的有功功率;Eqi′为q轴暂态电势;Eqi为空载电势;Iqi为q轴电流;Idi为d轴电流;Efi为控制输入;Yij为节点i和节点j之间的互导纳Yij=Gij+jBij;δij=δi-δj,i、j表示第i、j台发电机。
从系统的非线性模型(4)中可以看出,系统的非线性是由Pei引入的。故应用直接反馈线性化方法,引入新的状态量ΔPei=Pei-Pm0i,并设置了预反馈为

取Δδi=δi-δ0i,Δωi=ωi-ω0i,则系统(4)可以写成

根据式(4),可得多机系统线性综合模型(其中wi为实际系统中存在的外部扰动)为

其中,xi=[ΔδiΔωiΔPei]T;
3 最优滑模鲁棒控制原理
考虑不确定性线性控制系统

式中:x(t)∈Rn,u(t)∈Rm分别为系统的状态量和输入量;ω(x,t)代表系统外部扰动。设不确定线性系统(9)满足以下条件:
(1)(A,B)已知且能控,而且

(2)ω(x,t)关于x连续可微,是t的分段连续函数;
(3)存在未知的函数向量ϖ(x,t)使成立。

(4)存在常数γ0、γ1,使得ϖ(x,t)满足

式中,‖·‖表示Euclidean范数。
针对不确定线性系统式(10),设计一种最优滑模鲁棒控制器,主要步骤如下。
1)标称系统的求解
若给定的标称系统(即ϖ(x,t)=0),根据最优控制理论可知,存在唯一的最优控制律

使得下面的二次型性能指标取得极小值

式中:Q∈Rn×n为正定或半正定矩阵;R∈Rm×m为正定对称矩阵,P为Riccati方程的唯一解,即

此时的闭环系统

是渐进稳定的。若将式(14)直接运用到不确定系统(10),系统状态轨迹将会偏离标称系统的最优值,甚至导致系统不稳定。下面通过积分滑模控制来解决上述问题。
2)鲁棒最优滑模面的设计
考虑不确定系统式(10),定义积分滑模面为


式中:G∈Rm×n且满足GB是非奇异的;x(0)是系统的初始状态。则可保证系统的初始条件在滑动模上,沿s(x,t)=0的滑模运动是稳定的,证明如下。
将式(18)沿式(14)对时间求导可得


把式(20)带入式(10)结合假设(3),最终得到系统的滑动模态方程为

由此可见,不确定系统(10)的滑模动态方程与标称系统的闭环状态方程(14)相一致。所以,此滑模运动也是稳定的,并且对于满足一定假设条件的不确定性具有完全鲁棒性。
3)滑模控制律的设计
对于滑动模态(18),选取Lyapunov函数

应用滑动模态的可达条件

构造出变结构鲁棒控制律为

式中:γ>0,ucon(t)为控制律的线性部分,用以镇定和优化标称系统;uvss(t)为控制律的非线性部分,为系统(10)的不确定性提供完全补偿。
4 多机系统励磁控制器的设计
从式(5)可以看出,ΔPei是可观测的。若直接用其设计控制器比较复杂,本文通过构造二阶ESO来观测该部分,用z2i来估计,即

则控制量为

考虑线性系统式(10),应用最优滑模鲁棒控制理论,求解相应的Riccati方程,得

以及最优滑模鲁棒控制律

将Vi带入式(26),可得到发电机的非线性励磁控制律为
由此可见,控制律式(29)中的变量均为局部可测量,只与第i台发电机组有关,而与电网参数无关,因而可实现多机系统分散协调控制。
5 仿真分析
5.1 仿真参数
本文采用四机两区系统如图1所示,仿真时考虑了控制器的限幅,0 p.u.≤Ef≤12.3 p.u.。发电机的参数如表1所示,系统的初始运行状态如表2所示。仿真时假设各发电机的机械功率在暂态过程中保持不变,Pmi=Pm0i。在这些相同条件下,对四台发电机分别采用常规AVR+PSS控制律和控制律式(29),通过Matlab/Simulink仿真工具考查本文方法的有效性。
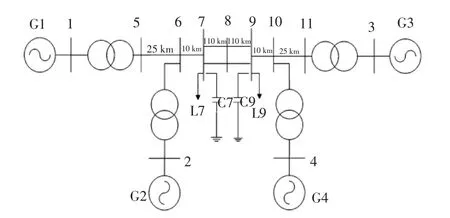
图1 四机两区系统示意Fig.1 Schematic diagram of two-area four-machine power system

表1 发电机参数Tab.1 Parameters of generator
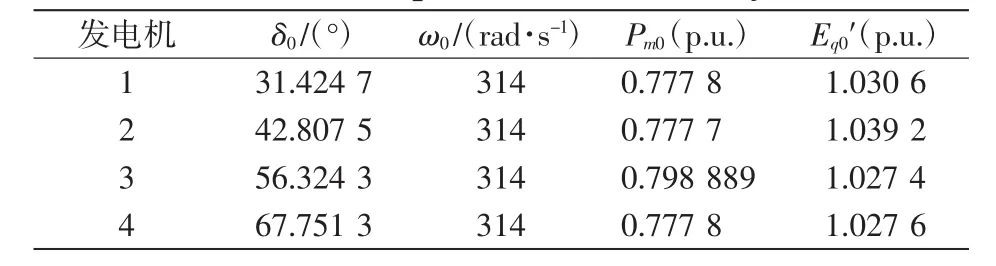
表2 系统的初始运行状态Tab.2 Initial operation state of the system
采用最优滑模鲁棒控制时,根据文献[14]的原理选取权矩阵Qi,Ri设计了鲁棒最优滑模励磁控制器。解得线性最优部分反馈系数为
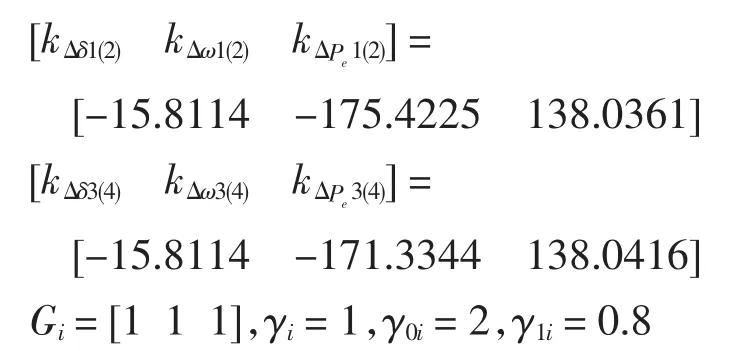
其中,ESO的参数为:β01i=128,α1i=0.5,δ1i=0.01;β02i=307,α2i=0.25,δ2i=0.01。
5.2 算例1
在1 s时,节点7和节点8之间某条线路靠近节点7侧发生三相短路,1.2 s时系统恢复正常,系统运行20 s。图2为1、2、3号发电机与4号发电机的相对功角差曲线,图3为四台发电机在不同的控制规律下的机端电压响应曲线。
通过对比,可以得出以下结论。
(1)从图2可以看出,当四台发电机都采用式(15)的控制律时,超调量及振荡次数明显减小,系统的稳定性得到提高,在5 s左右,机组振荡基本平息,相对转子角稳定;而采用常规AVR+PSS控制律时,超调量大,收敛速度较慢。

图2 发电机相对功角响应曲线Fig.2 Responses curves of rotor angle

图3 发电机机端电压响应曲线Fig.3 Responses curves of terminal voltage
(2)从图3不难看出,采用式(15)的控制律时,四台发电机的机端电压得到很好的改善,恢复时间快;而采用常规AVR+PSS控制律时,超调量大,并且在仿真结束时各发电机的机端电压一直处于平衡点之上。
5.3 算例2
在1 s时,节点7和节点8之间某条线路靠近节点7侧发生三相接地短路,1.55 s时系统恢复正常,系统运行50 s。以发电机1为代表给出了如图4所示的各状态量响应曲线。其他机组类似,不再赘述。从图中可以看出,采用式(29)的控制律能使系统依然保持稳定,只是振荡时间较算例1有所延长,而采用常规AVR+PSS控制律时,在仿真结束时,发电机1和4相对功角差处于振荡状态,发电机1的功角和输出功率也处于振荡增大状态,端电压最后稳定于1.15,高于稳定平衡点之上。
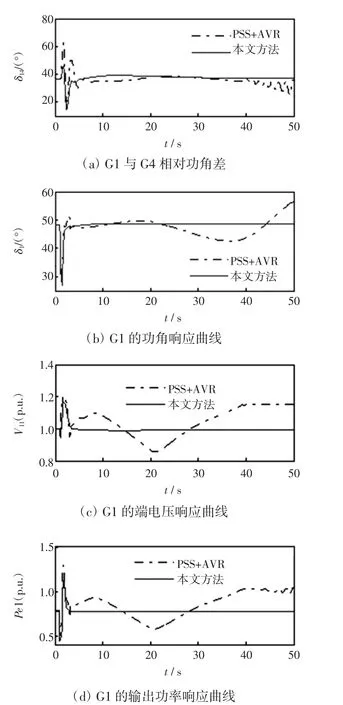
图4 发电机组1响应曲线Fig.4 Responses curves of G1
以上表明,由于考虑了发电机组的非线性以及不确定的扰动,本文所设计的非线性鲁棒控制律相对于常规AVR+PSS控制律不但增加了系统阻尼,改善了系统的动态性能,还有助于系统暂态性能的提高。由于ESO补偿了系统的扰动,算例2与算例1相比,本文方法的控制性能所受影响不大,表现出较好的鲁棒性。
6 结语
本文针对系统存在非线性和不确定扰动的特点,引入ESO和带积分滑模面的最优滑模鲁棒控制设计了非线性鲁棒励磁控制器。用ESO对系统的非线性动态实时估计,实现线性化处理,简化了控制器的设计。文中构造的积分滑模面不存在趋近模态,这点与传统的滑模面不同,使系统的整个动态过程都有鲁棒性。由于该控制器的设计综合考虑了系统所受的未知扰动,因此对不确定扰动具有较强的鲁棒性。仿真结果验证了所设计控制器可以有效提高多机电力系统的稳定性、鲁棒性,并能维持机端电压。
[1]郝正航,邱国跃,陈卓,等(Hao Zhenghang,Qiu Guoyue,Chen Zhuo,et al).多机系统线性多变量最优励磁与线性最优PSS的设计与比较(Design and comparison of multi-variable optimum excitation control and linear optimum PSS in large power systems)[J].中国电力(Electric Power),2006,39(3):32-36.
[2]范澍,毛承雄,陆继明,等(Fan Shu,Mao Chengxiong,Lu Jiming,et al).多机电力系统神经网络最优励磁控制器(Neural network based optimal excitation controller for multi-machine power system)[J].中国电机工程学报(Proceedings of the CSEE),2004,24(7):80-84.
[3]曾正,刘涤尘,廖清芬(Zeng Zheng,Liu Dichen,Liao Qingfen).Terminal滑模变结构励磁控制设计及仿真研究(Design and simulation study on terminal sliding mode variable structure excitation control)[J].电力系统保护与控制(Power System Protection and Control),2010,38 (23):1-5,59.
[4]韩京清.自抗扰控制技术[M].北京:国防工业出版社,2008.
[5]杨大志,杜正春,方万良(Yang Dazhi,Du Zhengchun,Fang Wanliang).多机电力系统变结构励磁控制器的设计研究(Design and study of variable-structure excitation controller for multi-machine power systems)[J].继电器(Relay),2004,32(16):8-11,24.
[6]李啸骢,李文涛,徐俊华,等(Li Xiaocong,Li Wentao,Xu Junhua,et al).不确定性电力系统鲁棒自适应励磁控制(Robust adaptive excitation control for uncertain power system)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2011,23(3):13-17.
[7]兰海,李殿璞,杨丽华(Lan Hai,Li Dianpu,Yang Lihua).多机系统励磁的非线性L_2增益干扰抑制控制(Nonlinear L_2 gain disturbance attenuation control for multimachine power system excitation)[J].电机与控制学报(Electric Machines and Control),2005,9(2):151-155.
[8]Colbia-Vega A,de Leon-Morales J,Fridman L,et al.Robust excitation control design using sliding-mode technique for multi-machine power systems[J].Electric Power Systems Research,2008,78(9):1627-1634.
[9]余向阳,南海鹏,余娟,等(Yu Xiangyang,Nan Haipeng,Yu Juan,et al).自适应积分逆推滑模励磁控制研究(Adaptive integral backstepping sliding mode generator excitation control)[J].中国电机工程学报(Proceedings of the CSEE),2009,29(10):74-77.
[10]邹德虎,王宝华(Zou Dehu,Wang Baohua).多机电力系统自适应鲁棒Terminal滑模励磁控制(Adaptive and robust excitation control with terminal sliding mode for multi-machine power system)[J].电力自动化设备(Electric Power Automation Equipment),2010,30(12):79-82.
[11]Bizzigotti R A.Electromechanical translational apparatus [P].US Patent:3902085,1975-08-26.
[12]O’Neill C G.Electro movie actuator[P].US Patent:4219755,1980-08-26.
[13]卢强,梅生伟,孙元章.电力系统非线性控制[M].2版.北京:清华大学出版社,2008.
[14]卢强,王仲鸿,韩英铎.输电系统最优控制[M].北京:科学出版社,1982.
Optimal Robust Sliding Mode Excitation Controller for Multi-machine Power System
LI Tian-yun1,LI Hui-min2,YU Xing-lin1,HE Ye2
(1.Institute of Electrical Engineering,Northeast Dianli University,Jilin 132012,China;2.School of Automation Engineering,Northeast Dianli University,Jilin 132012,China)
Aim at the nonlinear and uncertain disturbances in the multi-machine power system,combined with linear quadratic optimal control and integral sliding control mode,a robust optimal sliding mode excitation controller is designed.The extended state observer is applied to estimate and compensate uncertainties in real time,and come true the linearization.Aim at the problem of conventional linear quadratic optimal control,the integral sliding mode control is adopted to enhance robustness.An optimal sliding surface have good robustness to various distrubances under the whole process of sliding mode.The simulation results show that the controller not only can effectively improve power system transient stability under the big disturbance,but also have good robustness to various disturbances.
multi-machine power system;extended state observer(ESO);optimal sliding mode;excitation control;robustness;active disturbance rejection controller(ADRC)
TM762
A
1003-8930(2013)06-0087-06
李天云(1945—),男,博士,教授,从事自动控制理论、信号处理、非线性系统理论的教学及其在电力系统中的应用研究。Email:tyleee@126.com
2011-12-14;
2012-01-05
李慧敏(1987—),女,硕士研究生,研究方向为电力系统的稳定与控制及信号处理在电力系统中的应用。Email:lihm_05@163.com
于兴林(1987—),男,硕士研究生,研究方向为电力系统的稳定与控制及信号处理在电力系统中的应用。Email:yx012lin@163.com