基于可调电源的电轴整步研究
2013-06-06周文祥郭成磊
王 维,周文祥,郭成磊
(西南交通大学牵引动力国家重点实验室,四川成都 610031)
0 引言
滚动振动试验台用于提供铁道机车车辆线路运行试验所需的模拟定置条件,研究机车组装完成后的牵引/制动、动力学性能及各系统的功能验证[1]。机车牵引试验要求滚动试验台轨道轮精确同步旋转[2],实现滚轮同步旋转的方法有两种:一种是机械上同步,简称机械同步;另一种是通过电路控制实现同步,简称电气同步[3]。由于电气同步在调节轴距、结构设计、维修等方面占有明显优势,现西南交大滚动振动试验台改造中采用电气同步的方式,而在电气同步控制中,整步是一项关键的问题。传统的整步方式是采用单相整步[4]或者两相整步,传统的整步方法操作复杂,线路开关多,噪声振动大,结合滚动试验台改造的特点,现提出一种新的整步方法,可调电源整步方法。
1 电轴系统工作原理
图1 为铁道车辆电气牵引传动系统试验台的一根轴上的机械构造,图2 为电轴系统原理图,由于各绕线式异步电机定子绕组并联到电网,气隙中产生旋转磁场,如果各电机转子的三相对称绕组旋转位置相同,则产生的感应电势大小相等相互抵消,转子绕组回路不产生平衡电流,不产生同步调节转矩。如某一电机轴系的动力转矩增加或负载转矩减少,相对其余的电机,转子产生超前转角θ,合成电势不为零,转子绕组回路产生平衡电流,形成的同步调节转矩将使该电机减速,其余电机加速,最终建立新的平衡,使各电机轴的转速相同。因此,简单有效地保证了各轨道轮对的同步旋转。电轴系统用于转速同步,还可以用于功率回流。

图1 铁道车辆电气牵引传动系统试验台第一轴机械构造)

图2 试验台中电轴系统图
2 电轴的整步
电轴系统起动时,必须先使两辅机整步。这是因为系统在上一次停车时,由于两轴的惯性可能不一致,以及两轴制动的时间和转矩不一致原因,造成两轴的位置不一致,两辅机转子之间在起动时将会存在一个位差角。如不整步时,当位差角较大时,在转子电路中将会流过太大的起动电流,还可能导致系统失步[5]。在电轴系统中,电轴系统中的平衡作用决定于两辅机的转矩之差,把这个转矩差称为平衡转矩ΔT:

其中:T1为辅助电机1的电磁转矩;T2为辅助电机2 的电磁转矩;X2、R2为转子每相电抗、阻抗;s 为转差率;θ 为位角差。
由上式可见,位差角θ 一定时,ΔT 随s 的增大而增大,一般在稳定状态下的位差角不超过30°,要得到足够的平衡转矩,辅机必须逆着磁场旋转,使s足够大。
图3为转矩对位角差的特性曲线图,由图3可知,造成系统失步在于转矩对位角差的曲线对于横坐标是不对称的。
如图3 中曲线可知,当电轴系统定子侧直接接入三相电网时,当电轴电机位角差不大时,T1为正值,T2为负值,则经过一连串的振荡之后,位角差将减少到0 使两轴保持一致。但当位角差较大时,在转子电路中将会流过太大的起动电流,还可能导致系统失步。
在本滚动驱动试验台中,电轴系统必须进行整步,以前常用的是单相线路法电轴整步,这种整步振动噪音大,转子有冲击电流,且需要用人工进行盘车,比较麻烦,并且整步效果不是很好,如今改用可调电源整步,其可调电源整步有两种方法。
(1)采用低频低压,即变频器采用V/f 控制,频率缓慢上升,这样系统在频率逐渐上升的阶段,系统平稳过渡,不会出现较大电流。
(2)采用低压恒频,即变频器采用恒频调压方式进行调节,在缓慢的调节电压,系统也能很好的整步,并且电流也不会较大。

图3 转矩与位角差

图4 25 Hz和50 Hz下的转矩关系

图5 在30度下频率与转矩的关系

图6 3种整步原理图
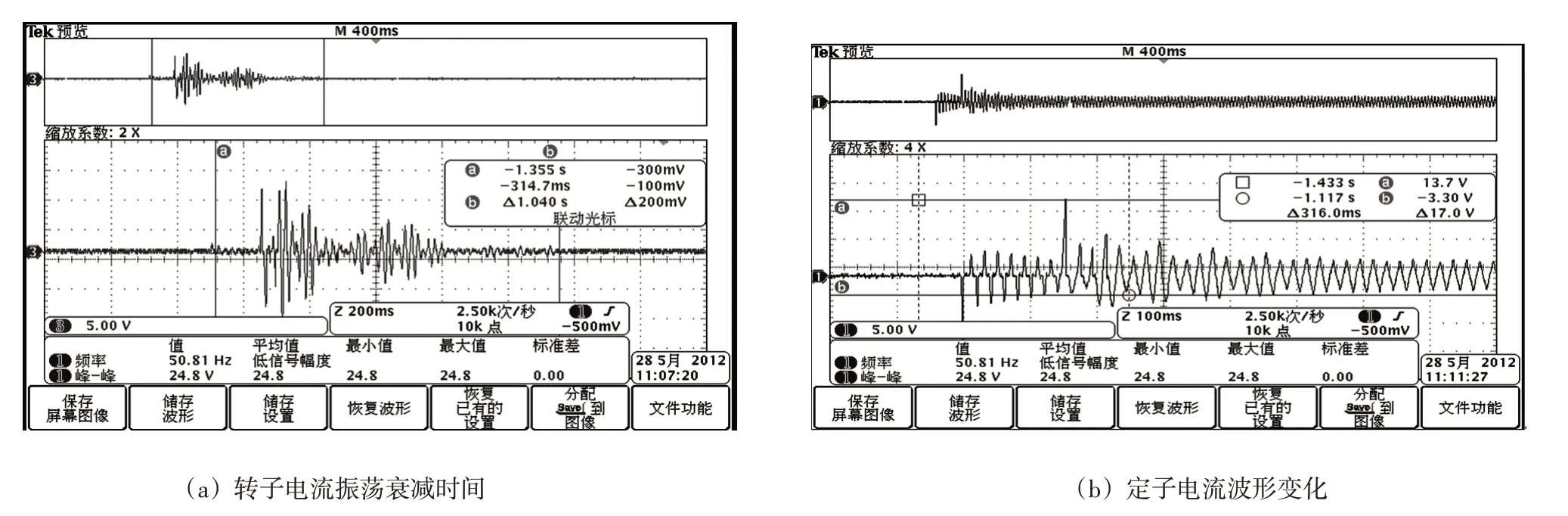
图7 单相整步波形
变频整步不同于单线法和两相法,其整步方法属于三相整步,只是采用V/f控制,由仿真图4可知,假设刚开始位角差为30°,随着频率的增加,转矩T1和T2逐渐增加,由于T1和T2相向旋转,位角差减少,位角差的减少又促使转矩T1和T2的减少,这样在逐步增大电压的幅值和频率的时候,机械相位差的消除平滑、无振荡,而不会产生冲击电流和冲击转矩。
3 实验

图8 调压器整步波形

图9 变频整步波形
在该实验中绕线电机参数为:M1 和M2 绕线式异步电机型号为YZK160M.1-6,其功率为Pn=5.5 kW,定子额定电压为U1=380 V,定子额定电流为I1=15 A,转子额定电压为U2=135 V,其转子额定电流为I2=29 A,运行的额定频率为f=50 Hz,额定转速nN=930 r/min,转动惯量Jm=0.12 kg.m2,变频器容量为11 kW,额定电流16 A,变频器选用台达C2000,M3和M4是型号相同的直流电动机。
图6为三种整步的原理图。
3.1 单相整步波形
单相整步波形如图7所示。
3.2 调压器整步波形
调压器整步波形如图8所示。
3.3 变频整步波形
通过变频器调节参数,图9 为f=20 Hz,I=15.01 A 时变频整步波形。其中,波形③代表绕线电机转子电流,波形①代表绕线电机定子侧电流。在变频整步中还做了f=30 Hz,f=50 Hz的实验。
三种整步方式的特点如表1所示。

表1 三种整步方式的特点
4 结论
通过对5.5 kW 电机和台达C2000 小功率变频器进行试验验证,其整步空载电流小于变频器额定电流,并且不会产生冲击电流,所以采用变频器励磁整步将会达到很好的效果,没有大的冲击电流产生,系统平稳过渡。结合试验以及滚动振动台工程的实际情况,可以采用变频器整步取代以前传统的单相整步法,而变频器可以采用远动控制,采用人机界面,节约人力,实现信息自动化。
[1]阮思维,熊颉.六轴机车滚动功率试验台机械传动系统[J].电力机车与城轨车辆,2005,28 (4):42-44.
[2]周文祥,连级三,郭育华.滚动振动试验台电气传动系统研制[J].西南交通大学学报,1994 (3):41-46.
[3]苏焘.浅析两种交流同步控制技术[J].机电工程技术,2010(6):20-24.
[4]方世鼎.电轴同步系统[J].人民长江,1985(6):24-27.
[5]顾绳谷.电机及拖动基础[M].北京:机械工业出版社,2004.
