基于PLC的流量与压力控制系统的研究应用
2013-06-06吴云飞冯开平黎康泰
吴云飞,冯开平,黎康泰
(广东工业大学,广东广州 510006)
0 前序
在工业生产控制中,尤其是连续性的生产过程中,常常要采集一些物理量如电量参数、压力、流量、温度等进行生产中的分析。拟量模块通过扩展接口与PLC 主机相连,一般用电缆连接在主单元的右边。使用温度、压力等传感器和变送器完成对模拟量的采集输人。依据控制要求设计编写PLC控制程序,再进行联机调试。
PLC 作为一种工业控制装置,在科研、生产、社会生活的诸多领域得到了越来越广泛的应用。大型的PLC 配备过程控制模块可同时控制几十路模拟量,但成本昂贵。中小型PLC控制系统仅对一路或几路模拟量进行闭环控制。硬件上只需配备数模及模数转换模块,可使用PID编程功能模块,只需设定好PID 参数,运用PID 控制指令,就能求得输出控制值。而厂家仅提供标准PID 算法,灵活性和适应性相对较差,如根据被控对象的具体情况不同,采用各种PID 控制的变种,如积分分离PID 、不完全微分PID、PI、PD等,这时用户可根据控制的算法,自行设计梯形图程序[1]。
1 PLC模拟量的闭环控制
在工业控制过程中,不管发生什么干扰,导致输出值变化后,总是想通过其自调性回到设定值对应的输出控制值上,使偏差等于零。

图1 无静差控制框架图[2]
在图1 的无静差控制中看出,在控制方法中采取的逐步累加(累减)的算法才能达到无静差,累加的过程就相当于积分环节,其积分的量不因累加的停止而停止,所以系统仍有输出[2]。
应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制。图2为本系统的闭环控制流程图,在闭环控制中PID 解决了其所需的本项目主要由PLC、变频器、压力变送器、电磁流量计和水泵等组成。通过PLC 采集流量计与压力传感器的模拟信号,进行其设定值与检测设备的反馈值的比较,运用PID 运算的调节功能,通过整定好的参数输出控制信号,输入到变频器进而控制变频器的频率,最终达到控制电机的转速。

图2 系统闭环控制示意图
2 PLC的PID控制
就目前而言,在工业控制领域尤其是控制系统的底层,PID 控制器仍然是应用最广泛的工业控制器。具有PID 控制器的产品已在工程实际中得到了广泛的开发与应用,有PID 参数的自整定功能的智能调节器,有利用PID 控制实现的压力、流量、温度、液位控制器,有能实现PID 控制功能的可编程控制器(PLC),还有可以实现PID控制的PC系统等。
PID 控制本身也在与时俱进,结合现代控制理论、智能控制理论和其他控制规律的优点,出现了诸多新颖的PID控制器,如自校正PID、专家自适应PID,预估PID,模糊PID,神经网络PID、非线性PID控制器等,使PID控制应用远远超过了线性、非时变的范围。
在模拟量控制中,PID 控制的数学表达式如下:

其中:U 为被控制量;P 为比例系数;I 为积分系数常数;D 为微分时间常数;U(0)为偏差为零时被控制量;e 为偏差(设定值与被控制值之差)。
PID 控制是由偏差、偏差对时间的积分和偏差对时间的微分所叠加而成。比例控制为偏差与比例参数的乘积组成。这是PID 控制中最基本的控制。图3 是过渡过程质量指标示意图,也是阶跃信号干扰作用影响下的过渡过程曲线图。常用的指标有:上升时间tr、过渡时间ts、衰减比n、静差、震荡周期与次数等。在PID 控制参数整定时,以能得到m1∶m2=4∶1 的衰减过渡过程为最好,这时的PID控制参数可称为最佳参数。

图3 过渡过程质量指标示意图
比例控制可减少偏差,但无法消除偏差,控制结果会产生余差。积分作用于偏差对时间的积分以及积分时间有关。加入积分作用,系统波动加大,动态响应慢,但却能使系统最终消除余差,使控制精度得到提高。微分输出与偏差对时间的微分以及微分时间有关。它对比例控制起补偿作用,能够抑制超调、减少波动、减少调节时间,使系统保持稳定。PID 控制系统框图如图4所示。

图4 PID控制系统框图
三菱系列PLC 采用的算法(采用数字递推增量式PID 控制算法,综合了一阶惯性数字滤波、不完全微分和微分先行等措施)[2]:

其中:e(k)为本次采样偏差;e(k-1)为一个周期前的偏差;SV为设定值;PVf(k)为滤波后本次采样测定值;PVf(k-1)为一个周期前的滤波后的测定值;PVf(k-2)为二个周期前的滤波后的测定值;ΔU 为输出变化量;U(k)为本次输出值;D(k)为本次微分值;D(k-1)为一个周期前微分值;k为比例增益;T为采样周期;Ti为积分时间;Td为微分时间;αd为微分增益。
3 应用
本项目采用PLC 控制器通过触摸屏进行人机对话操作,可设置各参数的上下限阀值、试验次数和时间,能自动或人工控制各部分动作的执行,自动控制为水压可以自动从高压到低压或低压到高压自动执行,每给检测水压力点能保持稳定1分钟。
系统使用的模拟量输入模块是FX2n-2AD。用模拟量输入模块进行模拟量输入一般都要先把模拟量通过相应的传感器和变送器变换为标准的电压(0~10 V,-10~10 V 等)和电流(0~20 mA,4~20 mA)才能介入模块通道。PLC也可采集脉冲方式输入的模拟量信号。系统主要采用周期采样的方式采取流量、压力两个电流模拟量,系统要求以额定的压力情况下,监测流量的参数,在开启测试时,启动时管内压力未达到设定值时,PLC 控制变频器的频率输出,进而改变水泵的输出的转数。在三菱PLC指令下,使用FROM和TO语句读取出模拟量模块采集的数据,进行数据的量化等处理,采用了三菱PLC 中正动作的算法,与事先设定的值比较,从而判断PLC 对变频器的模拟量输出值的大小。存储器分配如表1所示[3-4]。
PID 参数设定用MOV 语句对寄存器写入数值。根据表1的参数设定,PID指令执行部分程序如图5所示。
通过本系统调试,在恒压0.6 MPa下对参数的几次调整,基本上能找到合适的值,得出理想的控制效果[7-8]。参数的对比如表2所示。

表1 存储器分配表
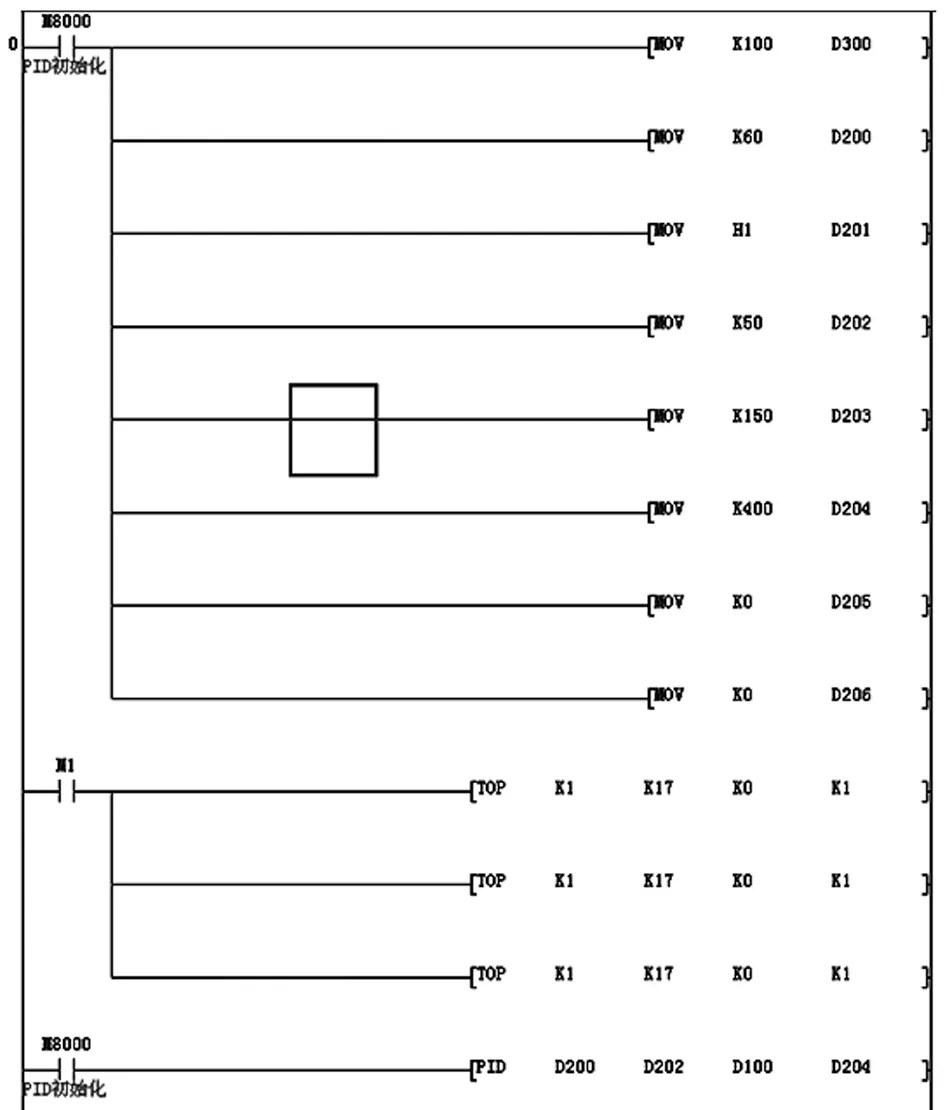
图5 PID指令部分程序[5-6]
经过多次的对图5中PID的参数整定,现场调试后,采用第n 次的参数能达到项目要求。得出表2 数据,利用变频调速器无级调节水压力,能在0~15 L/min 流量范围内调节,最高压强可达到1.5 MPa,在低压强输出时同样保证流量15 L/min,最低可达到0.02 MPa。
4 结论
目前,该控制系统已经在电器厂洗碗机的流量、压力特性测试机控制中得到了成功应用,现场运行效果良好。因此,利用PLC 实现的电机速度闭环控制,不仅可以获得与工控机相当的控制精度,而且还可以获得较工控机更高的可靠性和更强的抗干扰能力,值得大力推广应用。

表2 参数对比表
[1]任俊杰,李永霞,李媛.基于PLC的闭环控制系统PID控制器的实现[J].制造业自动化,2009(4):1-4.
[2]李金城.PLC 模拟量与通信控制应用实践[M].北京:电子工业出版社,2010.
[3]姚福强,高正中,姚福安.基于PLC 和变频器串行通讯的变频恒压供水系统[J].微计算机信息,2004(8):2-4.
[4]张文庆.PID 算法在PLC 模拟量闭环控制中的实现[J].信息技术,2003(1):1-3.
[5]三菱电机.FX1S,FX1N,FX2N,FX2NC 系列编程手册[Z].2005.
[6]三菱电机.FX 系列特殊功能模块用户手册[Z].2005.
[7]任俊杰,李永霞,李媛,等.基于PLC 的闭环控制系统PID控制器的实现[J].制造业自动化,2009,31(4):3-6.
[8]高文华,崔海,张素妍.基于PLC 的变频恒压供水系统的研究[J].西部大开发:中旬刊,2011(1):3-5.
