石英加速度计重力场试验定位基准问题与解决方案
2013-05-14孟慧丽李丹东张春京
汤 莉 王 雷 孟慧丽 李丹东 张春京
北京航天控制仪器研究所,北京 100039
在石英加速度计重力场试验中,使用传统的定位螺钉在反复拆装前后会造成仪表误差模型系数——失准角的变化,导致该系数的重复性测试精度低。这种安装误差与仪表自身的失准角误差叠加到一起,造成无法精确得到仪表的失准角,以及难以获得失准角的长期重复性。为了克服仪表重复拆装导致的问题,目前常用的方法是始终不拆装仪表。但是这样一来要长期占用设备,大大增加了试验的成本[1]。例如,以往进行的石英加速度计重力场长期稳定性试验,需要长期占用高精度分度头,而实际上进行测试的时间仅占十分之一,大量的时间处于空闲状态。
本文设计并实现了一种专用定位螺钉,可以克服仪表重复拆装所带来的问题,有助于利用相对少量的高精度测试设备,完成高精度的长、短期测试任务,提高设备利用率,降低试验成本。下面从误差机理分析入手,阐述加速度计定位基准问题。
1 误差机理分析
石英摆式加速度计的壳体如图1所示,图中标注了壳体坐标系的指向,它们是输入轴(IA),摆轴(PA)和输出轴(OA)。输入轴与仪表安装法兰盘基准面垂直,摆轴沿表芯摆组件的悬挂方向,输出轴与前2个轴组成的平面垂直,三轴的关系用矢量叉积表示为:
OA=IA×PA
(1)

图1 石英摆式加速度计的安装孔正视图
由于加速度计在±1g范围内工作,没有承受大加速度,K2,Koq和K3等非线性项不显著,所以在石英加速度计表头模拟量的重力场(±1g)试验中,采用如下数学模型:
(2)
其中,E为传感器输出(输出量);K0为偏值(g);K1为标度因数(输出量/g),沿输入轴的一次项系数;Kip为输入轴与摆轴的交叉耦合二次项系数(g/g2);Kio为输入轴与输出轴的交叉耦合二次项系数(g/g2);δo为绕OA轴的失准角,沿摆轴的一次项系数;δp为绕PA轴的失准角,沿输出轴的一次项系数。
石英加速度计表头的重力场多位置试验分为2种测试状态:
1)摆态试验——绕输出轴(OA)旋转的试验;
2)门态试验——绕摆轴(PA)旋转的试验。
最终结果是2种测试状态的综合。
在摆态试验中,安装方式如图2所示。
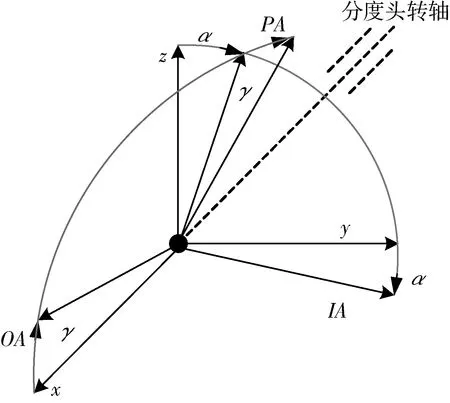
图2 摆态试验示意图
图2中,α为IA轴与水平基准之间的夹角,通过转动分度头等设备,可使α在0°~360°之间变化,从而让加速度计敏感-1g~+1g之间的加速度。
γ为分度头旋转轴与水平基准之间的夹角,当γ小于3′(3′仅针对本文涉及的石英加速度计,试验前通过调平实现)时,ao是一个小量(小于8.7×10-4g),Kio一般在10-5量级,δp一般在10-4量级,则Kioaiao(小于2×10-8g),δpao(小于5×10-7g)均为二阶小量,可以忽略。
为分析问题实质,下面给出较详细的公式描述。
当α=0°时,沿加速度计3个坐标轴的输入加速度分别表达为:
(3)
δo·g+0=K0P+δo·g
(4)
当α=-180°时,沿加速度计3个坐标轴的输入加速度分别表达为:
(5)
δo·(-g)+0=K0P-δo·g
(6)
当α=-90°时,沿加速度计3个坐标轴的输入加速度分别表达为:
(7)
(-g)·0+δo·0+0=K0P-g
(8)
当α=-270°时,沿加速度计3个坐标轴的输入加速度分别表达为:
(9)
δo·0+0=K0P+g
(10)
综合公式(4),(6),(8)和(10)可得
(11)
公式(11)正是当前国家军用标准[2]中重力场翻滚试验四点法所采用的失准角表达式。
上述推导建立在忽略二阶小量的前提下,联系后文对安装基准的分析,可以发现其中存在的问题。
以往,在石英加速度计静态测试中,安装螺钉采用的是符合国标的螺钉(M3规格,a=3mm),而石英加速度计的安装定位孔内径却是φ3.5(b=3.5mm)。加速度计安装过程中,较小直径的螺钉落进较大直径的安装孔,二者之间没有实现紧配合,存在约(b-a)/2mm~(b-a)mm的间隙,能自由晃动,这个晃动量处于安装法兰平面中,会产生绕IA轴转动的角误差β,如图3所示。
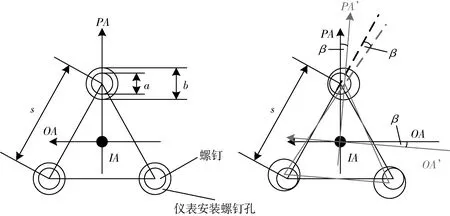
图3 国标螺钉与石英加速度计配合时产生定位误差的示意图
假设安装孔由中心位置向一边倾斜x=(b-a)/2mm=0.25mm,安装孔距s=25mm,上述螺钉与螺孔匹配造成的β=x/s=0.25/25rad = 0.01rad ≈ 0.57° ≈ 34′,该绕IA轴转动的角误差会进入仪表输出轴与水准面的夹角γ(最大时可达34′),远大于假定值和实际调平的3′。这时,δpao较大时可达约5μg。此时,δpao已经不是二阶小量,它会进入到仪表的输出中,在反复拆装仪表的情况下,造成较大的随机安装基准误差,失准角的重复性精度会受到较大影响,在不拆装仪表的情况下,标定的失准角结果也有较大误差。
在摆态试验中,该安装误差会进入失准角δo中。同理,在门态试验中,该安装误差会进入失准角δp中。通过仿真计算可得,造成的失准角误差约±5μrad。
因此,现行的石英加速度计安装螺钉存在一定的误差,引入的基准随机误差峰峰值会达到约10-5g,限制了该类仪表在更高精度领域的应用。
提出该问题是否也和重力场中的其他问题一样,可通过多位置方法互相抵消,分析表明不能互相抵消,从公式(4)和(6)看,0°位置和180°位置相减,γ角引入的失准角误差是2倍关系,这与直观感觉不一致,也是该问题容易被忽略的原因之一。
为提高石英加速度计在反复拆装情况下的重复性精度,或者改进螺钉设计,或者在转台上进行不拆表的逐次通电试验。前者有望利用有限的设备资源应对大批量的仪表试验,后者要长期占用设备资源,仅能对小批量的仪表进行成本昂贵的试验。本文主要就前者的可能性进行探讨。
2 解决方案
如果让螺钉与安装孔实现紧配合,上述误差源有望从根本上消除。目前,常用于各种部件安装和定位的联接方式,可分为螺纹联接、铆接联接、销联接。
螺纹联接所需国标螺钉从外观上分为3部分:螺帽、无螺纹螺杆和有螺纹螺杆。其中,无螺纹螺杆是联接螺帽和有螺纹螺杆的中间部分,它的外径尺寸在公差范围内要小于或等于螺纹的直径,有螺纹螺杆则根据其外径分为M1,M3,M4等各种不同规格的国标螺钉。通常情况下,螺钉穿过被测对象的安装孔与安装平面进行螺纹联接,正是由于国标螺钉的结构特点,当被测对象安装孔的内径大于螺钉无螺纹螺杆的外径时,导致每次安装位置不同,由此增加了安装基准误差。所以,国标螺钉不宜用于紧配合、高精度定位及要求重复性的应用场合。
铆接联接所需国标铆钉外观上有铆头和铆杆构成,常用的国标铆钉与国标螺钉的最主要区别就是其铆杆部分无螺纹,且铆钉多用于被测对象无拆装的场合,虽然定位精度高,但不能多次使用和拆装,应用场合有限。
销联接也可用于部件的安装和定位,常用的国标销钉外观上由无螺纹螺杆和有螺纹螺杆构成。定位销钉既可以实现螺纹连接,同时又可与被测对象的安装孔内径实现紧配合,但由于结构上没有螺帽,无法限制被测对象沿螺杆轴向的运动,将被测对象安装牢固,应用场合受到局限。
为克服现有技术的不足,结合了螺钉和定位销各自的优点,设计了一种专用定位螺钉,其定位杆外径与被测对象的安装孔外径在公差范围内实现紧配合,解决了高精度定位、可拆装、要求重复性的问题,大幅降低了安装基准误差,可广泛用于各种部件的安装及高精度测试的定位场合。
具体采用的解决方案:高精度测试定位螺钉,如图4所示[3],由上中下3部分组成:上部是螺帽(1),中部是定位杆(2),下部是带螺纹螺杆(3),有螺纹螺杆的螺纹外径与标准螺钉的螺纹外径一致。高精度测试定位螺钉的3部分是刚性一体的,螺钉金属材料的硬度低于被测对象安装面材料的硬度, 不会损坏测试工装的精密安装表面。所述的高精度测试定位螺钉的中部是定位杆,定位杆外径尺寸和长度根据被测对象的安装孔和测量精度需求而设计,使定位杆与被测对象的安装孔实现紧配合,达到精确定位的目的。

图4 一种专用高精度测试螺钉正视图
3 应用效果
目前,石英挠性摆式加速度计广泛用于中等精度飞行器的导航、制导和控制领域。
在石英加速度计的地面静态测试中,建议采用高精度测试定位螺钉,它中部是外径为Φ3.5的圆柱形定位杆,该定位杆的外径尺寸比传统的定位螺钉大,使定位杆与石英加速度计的安装孔实现紧配合,达到精确定位的目的。
理论上使用该定位方案后β误差角(见图3)最大时为3.4′,远小于常规螺钉的β误差角34′,大幅降低了安装基准误差,相应的δo和δp失准角误差也从±5μrad减小到±0.5μrad,极大提高了石英加速度计δp和δp误差系数测试标定的准确性、重复性精度。
实践中分别采用传统定位螺钉和高精度定位螺钉进行石英加速度计定位,进行重力场四点法试验(摆态安装,每次重新拆装),失准角计算结果如表1所示。

表1 失准角δo计算结果,单位μrad
由表1中数据可看出:
1)使用高精度定位螺钉后,失准角的重复性明显提高,2次差值从13.7μrad减少到0.7μrad;
2)2种定位螺钉得到的失准角均值有约12μrad的偏差(386.4~374.5),该数值与理论计算值基本相当,表明定位螺钉确实会影响失准角的计算结果;
3)与理论计算结果不一致的部分,分析认为是由其它误差源造成,比如仪表安装面的平面度不理想,这更突出了采用高精度定位螺钉的必要性。
4 结论
采用本文设计的专用定位螺钉,在实际工作中可以实现以下目的:
1)使用完整模型时,可相应提高仪表的使用精度。例如,在精密离心机试验中,代入精确的失准角标定结果,可提高半径反算精度几个ppm,进而提高给定加速度的精度;2)克服仪表重复拆装所带来的问题,从而实现利用相对少量的高精度测试设备,完成高精度的长、短期测试任务,提高设备利用率,降低试验成本;3)在多位置标定仪表系数的试验中,提高交叉轴一次项δo和δp的标定精度;4)利用外加激励方法标定偏值K0的过程中,保证K0的精度。
本文提出的定位基准问题与解决方案,虽然是以石英加速度计为例进行阐述,但对其它惯性仪表和惯性测量装置,也同样适用。
[1] W.G.登哈德,等.惯性元件试验[M].惯性元件试验翻译组,译.北京:国防工业出版社.
[2] GJB1037A-2004单轴摆式伺服线加速度计试验方法[Z].国防科学技术工业委员会,2004.
[3] 齐玉祥,等.实用新型——高精度定位螺钉:中国,200820108931.3[P].20121511Y.中国专利公报,2009年3月25日第12期.
[4] 张春京, 原俊安, 李丹东, 王雷, 任多立.从加速度计测试技术研究看惯性仪表测试技术发展趋势[J].航天控制,2005,23(2):78-84.(Zhang Chunjing,Yuan Junan,Li Dandong,et al.Development Trend of Inertial Device Test Technology in View of the Study of Acceleroment Test[J].Aerospace Control,2005,23(2):78-84.)
