MATCMATC系统车载ATPATP定位校正算法设计
2013-05-09刘毅东北京全路通信信号研究设计院有限公司北京100073
刘毅东(北京全路通信信号研究设计院有限公司,北京 100073)
1 背景介绍
1.1 MATC系统
本文为针对基于交叉感应环线的移动闭塞列车自动控制系统(M A TC)中车载ATP子系统定位校正算法的专题研究。
M ATC系统是配套国内中低速磁悬浮制式列车研究而研制的列车自动控制系统。而车载ATP系统作为该系统的重要组成部分,需要根据地面信息和机车信息防止列车超速运行,并保证列车行车安全。其中,通过一系列定位校正算法确保车载A TP保持正确定位,是实现车载A TP安全防护及稳定工作的重要基础之一。
1.2 MATC车载ATP位置校正
M A TC车载A TP子系统主要依靠交叉感应环线边界及固定位置交叉点进行列车定位校正。
交叉感应环线沿线布置,以400 m s为周期向车载A TP发送地面信息帧,并在该信息帧中传递可唯一标示本环线的ID号,车载A TP通过检测交叉感应环线的ID变化即可获得列车经过相邻交叉感应环线的时刻及位置。
交叉点在交叉感应环线内部,间隔固定距离布置,当车载TW C天线经过交叉点时,车载ATP可获得脉冲信号,并以此进行校位。
其中,定位校正算法的难点如下。
1)交叉点信号存在较多干扰,需通过适当选取交叉点接收窗口大小及丢失数目阈值等参数,在保证滤除干扰、定位正确的前提下,尽量提高系统可用性;
2)由于存在通信延时及地面调度周期影响,列车进入新环线与车载A TP实际收到该环线信息之间存在随机延时,实验表明该延时在10 ~800 m s间随机分布,在列车高速运行的条件下,将导致定位产生较大误差;
3)当列车高速通过连续短环线时,车载A TP可能丢失该环线信息,即产生“跳环”现象,定位算法中应对该现象进行处理。
刘毅东,男,硕士毕业于清华大学,助理工程师。主要研究方向包括嵌入式开发,车载ATP软件开发,曾参与基于通信的列车自动控制系统研究与设备研制,基于交叉感应环线的MATC系统集成研究项目。
下文将分别对以上3个难点进行说明。
2 定位校正算法说明
2.1 交叉点相关设计说明
2.1.1 交叉点距离选取
车载A TP使用交叉点进行位置校正,交叉点距离(Ssync)选取应满足以下条件。
1)两交叉点距离应大于一个车地通信周期(Tt-z)内车辆以最高速度(Vmax)走行的距离;在当前系统设计中,有
因此有Ssync≥Vmax×Tt-z>13 m
2)两交叉点距离应为枕轨间距(S)的整数倍,且为方便施工,应尽量保持为整数米。
3)为保证校位精度,应尽量缩小交叉点间距。
根据施工现场数据,有

而为满足2),可选长度为6N(N=1,2,3…)。即18 m、24 m、30 m…综合考虑通信延时裕量和交叉点电磁干扰后,选择使用24 m间隔。
因此,该距离需根据现场条件1)、2)计算后选取。
2.1.2 交叉点丢失数目选取
由于定位误差及环境问题,交叉点可能存在丢失的情况,为增加系统可用性,A TP应在满足定位误差的前提下容忍交叉点丢失,设未校位距离为ΔS,列车定位误差为Δoffset容忍阈值由以下因素决定:
1)在站台停车时,工程定制停准窗为±1 m,因此有

停车点设定在105 m,在最差情况下,考虑距离停车点最近的两组交叉点(96 m和72 m)全部丢失,则此时Δo f fset=(105 m-48 m)×2%=1.14 m,认为可以接受。若距离停车点最近的3组交叉点(96 m、72 m、48 m)全部丢失,则Δo ffset=(105 m-24 m)×2%=1.62 m,已无法置信A TP的停准判断。因此站台最差情况下,可容忍丢失2组交叉点。
2)在区间行车时,根据需求,车载A TP定位误差不应超过5 m。此时未校位距离

考虑道岔区段最多存在3条连续短环线组成的短环区,且两组短环区相隔距离不小于200 m,短环区内每条短环线均小于24 m,无法布置环线。则此时在合理情况下未校位长度ΔS1=24 m×4=96 m(设过环线边界不抵消2%的测距不确定性及短环线簇的前一环末尾24 m不进行校位),最大交叉点丢失数目为

即在正线运营时,最多可允许丢失6组交叉点。如图1所示。

现阶段,在不区分站台与正线停车的情况下,可容忍丢失2组交叉点。
2.1.3 交叉点接收窗口大小选取
由于车载A TP存在定位误差,因此需要设定交叉点接收窗口(Wsync),窗口大小由以下因素决定。
1)在最理想情况,即完成一次校位后,下一接收窗口应不小于A TP在Ssync内的测距误差,因此有

2)对于非24 m处交叉点,极限情况下,即2.1.2节2)中,若短环区前一轨的最后一个交叉点丢失,且新轨24 m处交叉点丢失,则有

通过1),2),对于非24 m处交叉点,窗口为3.36 m必然保证ATP正确解析交叉点信息。
3)在跨环线边界时,考虑第一周期的ZC帧无法被A TP正常解析,则A TP将延时判知进入下一环线,此过程中不再使用交叉点校位,该情况下,有

即在最差情况下,ATP将在进入新环线26.67 m后才开始接收交叉点信息,此时无法判断出环线第一个交叉点。
在A TP判断进入新环线后加入200 m s平均延时的算法下,ATP计算位置与车辆实际位置相差为
ΔX=26.67 m-(120/3.6) m/s×0.2 s=20 m
即若窗口大于4 m,则ATP将无法区分第一和第二个交叉点,造成定位错误。
因此在Vmax=120 km/h条件下,考虑2)、3)两种情况,若使用该过环线边界算法,为保证安全,应将窗口接收大小控制在3 ~4 m之间,此时在3)的假设条件下,A TP必然丢失新环线所有交叉点,导致紧急制动。
在实际运营中,一般有Vmax=80 km/h,此时使用上述步骤讨论如下:
在跨环线边界时,考虑第一周期的ZC帧无法被A TP正常解析,则ATP将延时判知进入下一环线,此过程中不再使用交叉点校位,该情况下,有

即在该情况下,A TP将在进入新环线17.8 m后开始接收交叉点信息,此时可通过调整窗口大小判断出环线第一个交叉点。
在A TP判断进入新环线后加入200 m s平均延时的算法下,第一个交叉点(专指24 m处交叉点,而非第一个接收到的交叉点)窗口大小为:

此时交叉点窗口前沿距环线边界为10.6 m,已处于边界干扰区之外,因此不会出现交叉点信号串扰现象。
由于环线边界已进行校位,不再单独计算该过程中A TP的2%测距线性不确定性。由上知在Vmax=120 km/h条件下,若24 m处交叉点窗口小于4 m,则新环线交叉点将全部丢失;若24 m处交叉点窗口大于4 m,则可导致A TP将48 m处交叉点作为24 m交叉点进行校位,产生定位错误;Vmax=80 km/h条件下,24 m处交叉点窗口不小于13.4 m即可保证该交叉点被正确解析,此时若该交叉点丢失且A TP未输出紧急,则由1)2)结论,ATP仍可通过48 m交叉点进行正确校位。
2.2 进入新环线定位处理说明
2.2.1 现有过环线定位方法说明
一般的,在A TP判断进入新环线后,需要对列车位置进行校正。目前的校正算法为A TP收到新环线ID后,首先将偏移(OFFSET)清零,再通过测量当前车速(VCUR)和估计ZC帧平均延时(TAVG)补偿车辆位置,即

根据现场测试结果,暂将TAVG设置为200 m s。
2.2.2 重设计过环线定位方法的讨论
通过2.1节讨论,知该方法的校位结果与最高车速相关,在最差情况下将导致A TP必然输出紧急制动或必然出现交叉点校位错误。对过环线处理算法重新设计如下:
1)若收到新环线ID时,列车偏移OFFSETCUR已大于当前所在轨长度length,则有

即直接将OFFSET转移到新轨道上,当发生跳环时,length中应包含已跳过的环线长度。
2)若收到新环线ID时,列车偏移OFFSETCUR不大于当前所在轨长度length,则有

其中,Δt为包含新环线ID的ZC命令帧与上一同类型ZC命令帧间的时间差,OFFSETOLD为收到上一帧ZC命令帧时车辆偏移,VCUR为Δt时间段内平均速度,一般的,等于当前测速结果。当发生跳环时,len g th中应包含已跳过的环线长度。
对交叉点校位过程进行重新讨论,内容如下。
a.交叉点距离选取与2.1.1节相同,即交叉点距离为24 m;
b.交叉点丢失数目计算与2.1.2节相同,即站台最多容忍2组交叉点丢失,区间最多容忍6组丢失;
c.非24 m处交叉点窗口大小计算与2.1.3节相同,即Vmax=120 km/h条件下,窗口大小为3.36 m;
d.对于24 m交叉点,若ATP收到新环线ID时:OFFSETCUR>length
则列车进入新环线后的定位与ZC帧延时无关,窗口大小仅由位置不确定性决定,即3.36 m。
OFFSETCUR≤length
该情况相关讨论如图2所示。
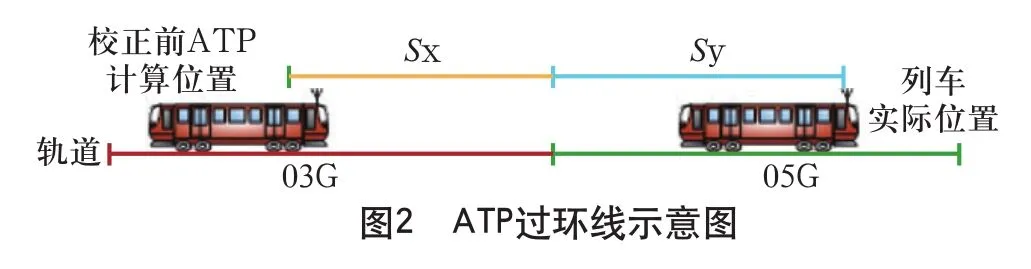
其中S x为列车收到03G最后一帧ZC数据时,A TP计算位置与环线边界距离差,y为A TP收到05G的ZC帧时,列车实际进入05G的距离。由校位算法:

若VCUR×Δt>SX,则校位后计算位置与列车实际位置差值仅与Δt内列车走行的距离有关。最差情况下,S x+S y对应的列车走行时间为3 s,即车载与地面间最大通信间隔,在VMAX=120 km/h条件下

若VCUR×Δt<SX,则校位后有OFFSETNEW=0,该位置与列车实际位置差值不大于校位前列车位置不确定性与Δt内列车产生的不确定性之和,即

通过之前分析,在A TP未丢失定位的条件下,有ΔSMAX=3.36 m,因此有

即设定窗口大小为5.36 m,即可保证24 m处交叉点被正确识别,且与最高车速无关。若因通信故障或其他原因导致24 m交叉点丢失,仍可按照3.36 m的窗口判别48 m交叉点,进行校位或继续丢弃。
2.3 跳环线处理说明
当车地出现通信中断时,车载A TP将有可能无法收到预期的下一相邻环线信息,为提高可用性,ATP需进行跳环处理,即在一定距离范围内,允许收到位于进路内非相邻环线ZC帧,并进行校位处理;而另一方面,当A TP通过计算判定跳环距离过大或跳环不合理时,应按照丢失定位处理,输出紧急制动。该处处理设计如下文所述。
2.3.1 ATP提前收到下一环ZC帧的处理
该现象主要由以下因素导致:
a.ATP定位误差;
b.工程安装误差;
c.电子地图错误。
考虑A TP定位误差,在2.1.2节所述最差情况下,有

因此考虑到可用性,可根据车载A TP需求将a中因素取为上限值,即5 m。工程安装误差包括交叉环线铺设长度误差及测速测距单元安装误差等因素,目前暂时将b中因素设置为ΔWb=5 m(可调),综合考虑a,b,并根据可用性增加ΔWs=5 m裕量,有
ΔWmax=(ΔWa+ΔWb+ΔWs)=15 m
因此当ΔWmax>15 m时,可认为A TP定位误差过大或包含c类因素,触发紧急制动。
2.3.2 ATP延迟收到下一环ZC帧的处理
1)当过环线时,车地通信正常,则该现象主要由以下因素导致:
a.ATP定位误差;
b.工程安装误差;
c.电子地图错误;
d.通信延迟。
考虑通信延迟,与2.1.3节3)中讨论相同,即
ΔWd=ΔL=Vmax×2Tt-z=(120/3.6) m/s×0.8 s=26.67 m
从而有
ΔWmax=(ΔWa+ΔWb+ΔWd+ΔWs)=41.67 m
因此当ΔWmax>42 m时,可认为A TP定位误差过大或包含C类因素,触发紧急制动。
2)当过环线时,车地通信发生不大于3 s的中断,则该现象主要由以下因素导致:
a.车地通信中断时长
若允许3 s的中断时长,则在最高车速120 km/h条件下,列车进入下一环100 m后才能接收到新ZC帧或触发紧急制动,此时A TP无法区分该现象是因正常中断时长导致或是因设备故障导致,且该长度已大于丢失3个交叉点的阈值范围,因此该长度认为已不安全。
在运营车速60 km/h条件下,列车进入下一环50 m后接收到新ZC帧或触发紧急制动,该距离与1)中计算的正常情况下跳环长度差距在可接受范围内。
综合考虑1)、2),认为将跳环长度设置为50 m可兼顾可用性与安全性。此时A TP可进行跳环处理,校位方式与2.2节讨论相同。
2.3.3 其他相关问题讨论
目前A TP允许车地通信存在3 s的中断,通过上一节的讨论说明该过程中列车在最差情况下已向前行进100 m,存在安全风险。因此可以考虑添加限制,即在车载A TP收到两帧ZC的时间间隔内,走行距离不能超过50 m,与跳环处理保持一致。
3 测试与结论
3.1 测试方法
对定位校正算法的测试基于M A TC项目现有半实物仿真平台进行,以下为该平台的测试环境示意如图3所示。
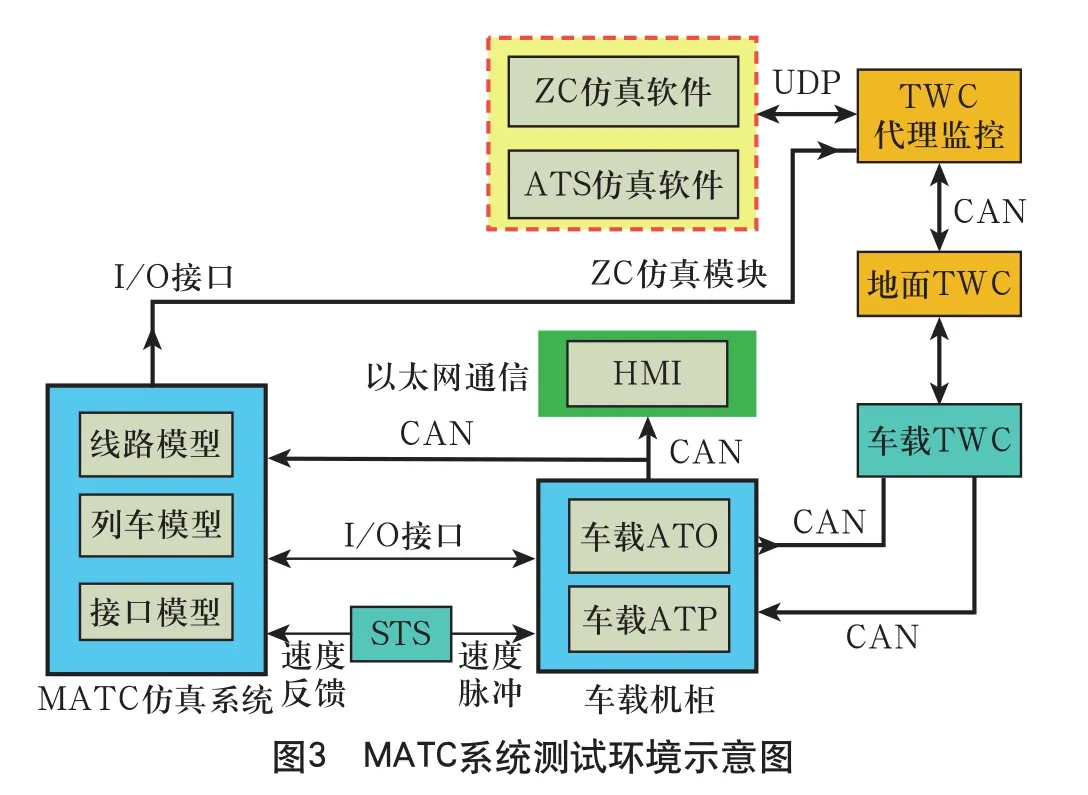
通过实时比较车载A TP定位计算结果与M ATC仿真系统中线路模型的理论计算结果,即可验证上文定位校正算法的有效性。图4所示为车载A TP在进入新环线及交叉点校位时的实时串口打印信息。

多轮系统测试结果表明,车载A TP在过环线及过交叉点时可进行正确校位,且能正确处理跳环操作,正常情况下,车载A TP与仿真系统线路模型定位误差可控制在3 m以内。测试结果在《MATC_车载系统测试报告》中记录。
3.2 结论
通过系统测试,证明当前车载A TP基于交叉点及进入新环线的定位校正算法可满足车载A TP定位需求,且具有较好的稳定性。
