基础运动技能优化群模型与评价方法研究
2013-05-05伊向仁郑春梅田吉明
伊向仁,郑春梅,田吉明
(山东大学体育学院,山东济南 250061)
运动技能学习是实现体育目标的主要路径,各种教学目标主要通过渗透到各种运动技术教学过程中得以完成,也就是说要以运动技术学习为主线来组织教学和达成各项教学目标。运动技能教学不是杂乱无章,应该遵循运动技能形成规律、人体机能规律、学生心理规律以及教和学的规律。运动技能掌握主要通过触觉、视觉、听觉等,以身体活动方式获得肌肉本体感觉。运动技能的累积性是从组织内部对运动感知开始,不断地摄入和积累自身的“运动感知源”,构成了运动技能的生成、积累、传递、创造的良性循环机制,使运动技能不断发展和完善。由于运动技能的积累过程需要有一定的基础素质和技能基础,而这些积累会受到学习者以前获取的运动知识、技能掌握种类与技能存量的限制,即学习者目前所能做的与他/她以前所掌握的技能程度有密切的关系。随着运动技能“存量”基础的增加,所能接受与加工的技能信息愈加复合化和高级化,这对于学习者吸收与积累新的技能创造了条件。因此,高级运动技能的学习需要大量基础运动技能群作为基础。但是,体育涉及的基础运动技能、各类项目运动技能有数百个,要使学生全部掌握这些技能几乎是不可能的。因此,优化运动技能群,使老师与学生能够在有限的学习时间内,掌握更多运动技术一直是我们研究重要课题之一。目前,我国对基础运动技能群研究甚少,其对优化群体系研究还没有发现。本文研究目的是根据运动技能理论,构建基础运动技能优化群模型与指标,提出其评价方法,为促进学生运动技能群系统发展奠定坚实基础,为学校体育教学管理提供有益参考。
1 基础运动技能优化群体系的界定及其依据
1.1 运动教育
欧美学者在20世纪60年代提出运动教育(Movement Education),强调从身体意识(Body Awareness)、空间(Space)、运动特点(Qualities of Movement)和关联(Relationship)等方面构建课程教学结构。身体意识包括:1)轴线运动(Axial Movements)—弯曲与伸展、扭曲与转动、推与拉、摇荡与摆动(Swing and Sway);2)转移身体重量—身体部分重量转移到另一部分、移动技术(Locomotor skills)(走、跑、单脚跳、蹦跳、飞跑、滑行、跃起、跨跳)、开始与停止、闪躲、着地;3)平衡;4)飞行。空间包括:1)个人或限制空间;2)一般空间;3)各种方向;4)各种水平;5)各种路径。运动特点包括:1)运动时间与速度;2)运动努力与力量;3)流畅度。关联主要是找出游戏、体操、舞蹈不同项目之间动作技术的关联,例如跳跃与落地、游动或移动、扭曲与转动、伸展与弯曲、平衡。教学中要求抓住所有身体动作特征,加强技术动作分析,从而更好地提高和改善学习运动技术的能力,如动作能力(稳定性、移动性、操作性动作能力)和身体能力(健康的身体调整能力)等。
1.2 动作技能维度分类系统理论
动作技能一维度分类系统。一维分类系统是根据技能的一般特征对动作技能进行分类,其中包括三种分类方法:1)肌肉系统参与程度的大小。根据完成动作时需要参与工作肌群的大小,研究人员将动作技能分为大肌肉群动作技能和小肌肉群动作技能。有些动作技能需有大小肌肉群共同参与才能完成,这时我们不能用此类方法区分。但是,这些技能却能够在分类连续体上标出相应位置,根据它们与两个端点的位置判断其技能类别,这种分类方法广泛应用于技能教学、特殊技能教育、体育教学测试等。2)动作开始和结束特征。人们把具有明显开始和结束界限的运动技能称为分立动作技能(Discrete Motor Skill),另一种没有明显开始与结束界限的运动技能称为连续动作技能(Continuous Motor Skill)。有时一项技能需要一系列分立动作或一个动作序列构成,称为序列动作技能。这种分类系统在运动技能研究中非常流行。3)环境背景的稳定性。这种环境背景包括个体操作技能的支撑平台、技能操作目标以及操作情境中涉及的人。稳定性是指操作环境背景是处于稳定状态还是运动状态。如果技能操作涉及的支撑面、目标及其人是稳定的,这种背景下操作的技能称为封闭性技能,相反就是开放性动作技能。开放性/封闭性的分类系统已经在运动教学中得到广泛应用。
动作技能二维度分类系统。Gentile(2000)[1]在一维度技能分类的基础上,发展为二维度分类系统,即从两个维度上分析技能特征:1)操作的环境背景特征,2)动作功能特征。她将这两个维度特征进一步分类,形成由十六种技能类型构成的分类系统。环境背景维度主要包括调节条件(Regulatry Conditions)和调节条件在操作尝试间变化(Intertrial Variability)状况。操作中调节条件是指运动状态还是静止状态。如果调节条件是运动状态,技能则被认为是开放性的。调节条件是静止状态,技能则是封闭性的。尝试间变化是指操作技能过程中调节条件保持不变还是发生变化,人们根据环境背景在操作过程中是否出现尝试间变化进行动作技能分类,分为身体定向(Body Orientation)和操纵(Manipulation)两种类型。身体定向有两种状态:身体稳定性和身体移动状态,它们对动作技能分类具有重要作用。操纵类型是指人必须准确地控制技能所涉及的对象,同时还必须调整身体姿势,克服由于控制对象原因而产生的身体失衡,这种分类的主要用途是:1)指导运动能力与运动功能障碍的评价;2)在身体康复治疗和提高教学中,作为适当选择活动进程的工具;3)作为评价技能缺陷和改进操作的一种工具。
1.3 知觉运动能力与身体素质能力
Fleishman(1972)[2]将人类运动能力分成两大类:知觉运动能力与身体素质能力。知觉能力类别包括:1)多肢体协调性(Multilimb Coordination),2)控制准确性(Control Precision),3)反应定向(Response Orientation),4)反应时(Reaction Time),5)臂的动作速度(Speed of Arm Movement),6)速率控制(Rate Control),7)手灵敏性(Manual Dexterity),8)手指灵敏性(Finger Dexterity),9)臂手的稳定性(Arm-hand Steadiness),10)手腕、手指速度(Wrist,Finger Speed),11)瞄准能力(Aiming)。身体素质能力包括:1)静态性力量(Static Strength),2)动态性力量(Dynamic Strength),3)爆发力量(Explosive Strength),4)躯干力量(Trunk Strength),5)伸展柔韧性(ExtentFlexibility),6)动态柔韧性(Dynamic Flexibility),7)全身协调性(Gross Body Coordination),8)全身平衡能力(Gross Body Equilibrium),9)耐力(Stamina)。Fleishman的知觉运动能力与身体素质能力的划分并不是完美无缺,在这两大类别中没有包括静态平衡能力、动态平衡能力、视敏度、视觉追踪能力、眼-手或眼-脚协调性。无论如何,Fleishman的运动能力分类方法是界定运动能力的重要工具。分类法中确定的能力类别及没有涉及的类别在运动技能操作中都起到基础性作用。
1.4 运动控制理论
运动技能闭环与开环控制系统理论。Adam(1971)[3]在运动技能研究领域提出了“闭环控制系统”(Closed-Loop Control System)理论 ,它是一种使用反馈、发现错误和纠正错误来保持理想目标状态的控制方式,感觉信息或反馈由执行器到效应器,再回到执行器所形成的环路构成了一个完成特定动作的调控系统。执行器包括刺激确认、应答选择和应答设计等决策程序。执行器将指令发送给由许多组件构成的效应器,它可产生作用于脊髓低级中枢并最终引起肌肉收缩和关节活动的所有指令。同时指定一参照物来详细说明正确动作的感知觉特征,这个参照物代表行为人所期望的反馈,也就是正确完成动作并和环境目标正好相符时所产生的感觉。
关于运动技能研究,闭环控制系统理论的主要论点是人在进行长时间、持续性、慢速度动作时,身体中任何一种感受器在运动过程中都可参加反馈,利用反馈方式,对错误运动技能进行修正。闭环控制系统理论的基础涉及知觉痕迹(Perceptual Trace)和记忆痕迹(Member Trace)。知觉痕迹是指在动作学习反馈过程中形成一个参考值,利用这个参考值来修正动作,直到达到理想的动作要求,由于每次学习反馈的信息不通,所有参考值也不同。如果这个参考值有很高的准确性,就形成了记忆痕迹。Adam认为运动技能学习是运用正确参照值进行错误觉察,再通过反馈进行不断循环修正,使其达成与目标一致的过程。大脑中存在记忆痕迹(Memory Trace),记忆痕迹中的信息指导动作执行,运动动作一旦开始执行后,以知觉痕迹作为参照值,经反馈比较后修正,产生新的知觉痕迹,这一痕迹成为下一次动作的标准。这个参照值是练习者想要完成动作的知觉结果,它是由先前动作的知觉反馈与动作结果所组成。经过不断的动作修正后,参照值形成最小动作误差,因而形成记忆痕迹,此记忆痕迹代表的就是最正确的动作。所以,在练习初期,由于参照值还相当微弱,必须有外在反馈(结果反馈)存在,等到参照值逐渐正确后,结果反馈的重要性才逐渐减低。
“开环控制系统”(Open-Loop Control System)理论是由美国加州大学Schmitt(1982)[4]提出,认为短时间、快速度完成的动作技能,在动作开始之前会有预先选择的动作程序,以弥补短时间内不能形成的反馈调节。“开环控制系统”理论是由感觉信息开始,经过神经中枢的运动系统发出指令信息,调节肌肉群参与及收缩时间,由于这些肌肉群收缩顺序早已成为固定动力定型,这些动作可以在无意识的情况下自动完成。这些动作的优点是不需要特殊的关照和注意力,以及额外调节其他肌肉群,只要需要时就能自然完成动作。这表明人可以在没有反馈信息参与的情况下,能够非常快速地完成动作,不需要再花费时间组织动作。缺点是当外界环境变化时,由于时间太短,没有反馈信息参与,在动作过程中无法修正和改正错误及调整动作,容易导致动作失败。因此,“开环控制系统”主要是控制那些稳定的、可预料的、将要发生的、不需要修正和调整的运动技能动作。
动作程序理论。Schmidt(1975)[5]认为动作程序不是特定的肌肉指令,而是抽象的、以记忆为基础的一类动作的表征,其每一类动作都有固定特征。虽然许多特征都可作为一般动作程序的固有特征,但仅三个特征被人们普遍认可,如技能表现中的相对时间、相对力量、各部分技能的顺序或次序。Schmidt(1975,1988)[4-5]图式理论进一步说明了一般动作程序如何运作与控制协调运动技能,阐明了技能学习和控制过程中的两个控制成分:1)一般动作程序,2)动作反应图式。动作反应图式的作用是提供在特定情境下管理动作的特定规则,即为一般动作程序提供参数。通过调节动作程序和图式管理控制,可以在协调运动时解决自由度问题,强调了控制中心储备具有抽象或概括的特质。在一定条件下,一般动作程序与反应图式共同作用,形成了操作一项动作所需的特定运动特征。
动力模式理论(Dynamic Pattern Theory,DPT)阐述了协调运动控制的一种方法,强调了环境信息作用以及躯干、肢体和动态特征,也称为动力系统理论。这种理论观点涉及多学科,如物理、生物学、化学及数学。DPT提倡者将人类的运动控制当做一种复杂的系统,其行为方式与那些复杂的生物或物理的系统类似。人类动作控制可从非线性动力学角度进行研究,说明了行为改变不是持续的、线性的,而是不断发生变化的。DPT还包括另外一些重要研究内容,如自组织(Selforganization)、协调结构(Coordinative Structure)和知觉-动作联结(Perception-action Cooping)等,这些理论阐述了协调运动组织作为协调结构,是以人、环境和技能表现之间相互作用特征为依据的,即形成知觉-动作联结。
1.5 运动技能学习迁移理论
正迁移与负迁移理论。研究者通常把学习迁移定义为先前学习或操作过的技能,有利于新技能的掌握或在新环境中操作该技能,称为正迁移(Positive Transfer)。已学习的某项该技能阻碍新技能的掌握或在新环境中操作该技能,称为负迁移(Negative Transfer)。有许多学者提出了正迁移假说,但主要有两种假说是非常有价值的,第一种假说认为技能和情景构成的相似性。传统观点更多的主张迁移是由于两种技能及操作情形之间的结构相类似。根据这种观点,如果两种技能或两种技能的操作情景构成有很多相似之处,它们之间就会产生大量的正迁移。就运动技能而言,相似部分有两种回答:1)相似部分与一项运动技能中动作类型部分相关;2)相似部分与特定任务的协调动力学理论有关。从运动控制的动力学模型观点,相同任务之间的相同趋势和相关关系将促进正迁移发生(Kelso& Zanone,2002;Wenderoth,Bock&Krohn,2002)[6-7]。结果相似的观点来源于 19世纪桑代克提出的共同要素原理,指出学习的正迁移发生,取决于两种技能特征的相似程度以及操作背景的相似程度。桑代克认为相同要素包括当身体活动时所分享的相同脑细胞活动的智力程序。通过对比技能成分相似性,期望创造具有更多正迁移的测试练习情境。第二种假说是需求程序的相似性。指出迁移发生是由于两种技能或两种情形所需认知过程的相似性。这个假说根据特定的迁移加工理论(Transfer-appropriate Processing Theory),强调通过技能和相关成分的相似性说明一些迁移的影响。为了在训练和目标任务之间发生正迁移,训练任务的两个成分是非常关键的,必须包括相同类型的活动,以及认知处理程序和目标任务之间具有相似之处。
尽管负迁移在运动技能学习中很少出现,并且十分短暂,但是我们必须知道可能发生负迁移状况,以便懂得如何避免这种影响,并能够恰当处理。特别发生负迁移的两种情境包括运动空间位置改变和运动时间结构改变。目前,至少有两种原因能解释负迁移效应的发生。第一种原因是技能学习所形成的记忆表像。用一种特定方法练习操作一项技能时,便会产生一种连接目标记忆特征和动作系统的记忆行为。当一个人在操作技能的具体情境中,看到记忆中非常熟悉的动作特征,动作系统便会以自己的偏好进行动作操作。但当熟悉的直觉情境不同于以前所学动作技能时,就会出现各种问题。另一种原因是由于认识模糊产生负迁移。例如,当你熟悉的键盘上的某个键的固定位置发生变化时,你敲打的不是以前位置的键盘,你总会感到困惑。主要问题是你的肢体控制能力出了问题,不是你不会如何敲击键盘,而是位置不同所引起的。这种负迁移的作用可以通过练习来逐步克服。
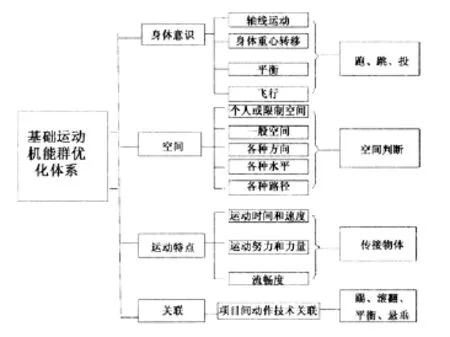
图1 基础运动技能群优化体系模型
两侧迁移理论。在运动技能学习中不仅在不同的技能学习中存在着正迁移或负迁移,而且在同一技能学习中,肢体之间存在着学习迁移,即技能学习的两侧性迁移或称对侧性迁移(Bilateral Transfer)。心理学家将两侧性迁移定义为个体利用一侧肢体学习特定运动技能后,其对侧肢体(非练习侧肢体)能表现出操作同一特定运动技能的能力(Ammons,1958)[8]。Bryant(1892)[9]是最早研究两侧性迁移的学者之一,提出了交叉疲劳(Cross-fatigue)不同于通常身体疲劳的观点。Woodworth在1899年发表了其经典专著自主运动的精确性 (the Accuracy of Voluntary Movement),奠定了研究手动瞄准两侧不对称性迁移的基础。Swift(1903)[10]是第一个以运动技能进行两侧性迁移研究的实验者,其结果显示右手技能训练效果似乎在左手也能有所体现,证实了运动技能两侧性迁移的存在。在1933至1936年之间,最著名的两侧性迁移研究者Cook连续出版和发表了一系列(5部)与两侧性迁移有关的论著。他所作的实验进一步证实了运动技能学习中存在两侧性迁移。
2 构建基础运动技能群优化体系模型
根据动作技能一、二维度分类系统、运动技能闭环与开环控制系统理论,我们能够发现运动技能发展的基本特点与规律。基于Movement Education的身体意识、空间、运动特点和关联等框架结构,选取具有共性的、联系实际的、可实践性指标,把基础运动技能群归化分为九大类别:跑、跳、投、空间判断、传接物体、踢、滚翻、平衡和悬垂。分别是跑、跳、投-身体意识,空间判断-空间运动项目,传接物体-运动特点,踢、滚翻、平衡和悬垂-关联运动项目,构建基础运动技能群优化体系模型(图1)。
3 选择模型评价指标
根据运动技能学习迁移理论,联系我国学校体育对各项运动技能学习实际。对这些运动技能群选择主要是从田径、篮球、足球、体操等项目中,模型中各类指标选择主要体现Fleishman知觉运动能力与身体素质能力,但在这两大类别中没有包括静态平衡能力、动态平衡能力、视敏度、视觉追踪能力、眼-手或眼-脚协调性,也在模型评价指标中加以体现。
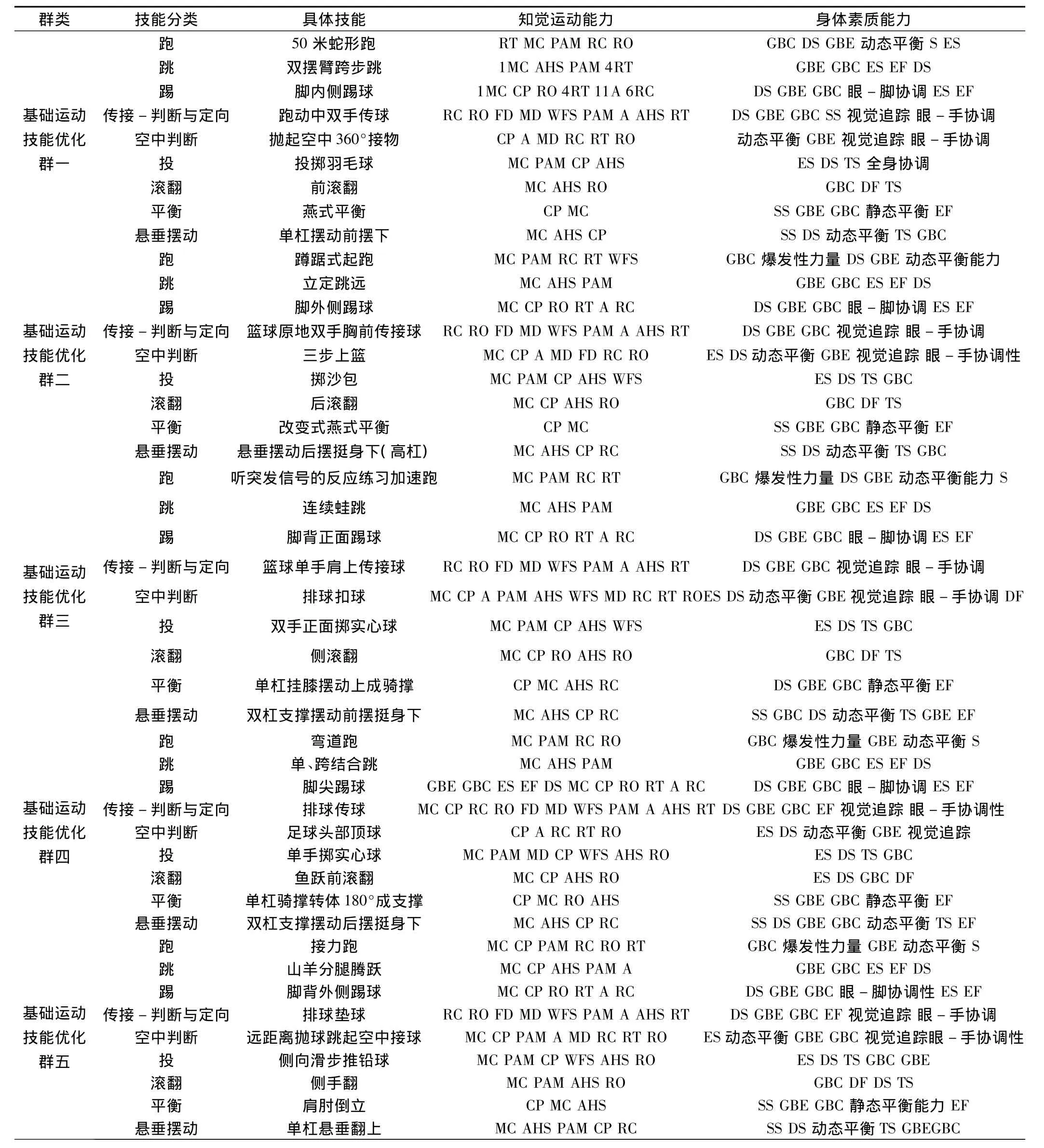
表1 基础运动技能群模型评价指标范例
4 基础运动技能群指标评分方法
根据基础运动技能每项动作评分要求,把每项技能分解为四个动作,根据每个分解动作的重要程度设置不同分值,每项技能的总分为4分,9项群总分值为36分。其中每项技能每人可以做两次,两次分值相加,每个技能群满分成绩是72分。例如,原地抛球后转体360°跳起接球评分方法 (如表2)
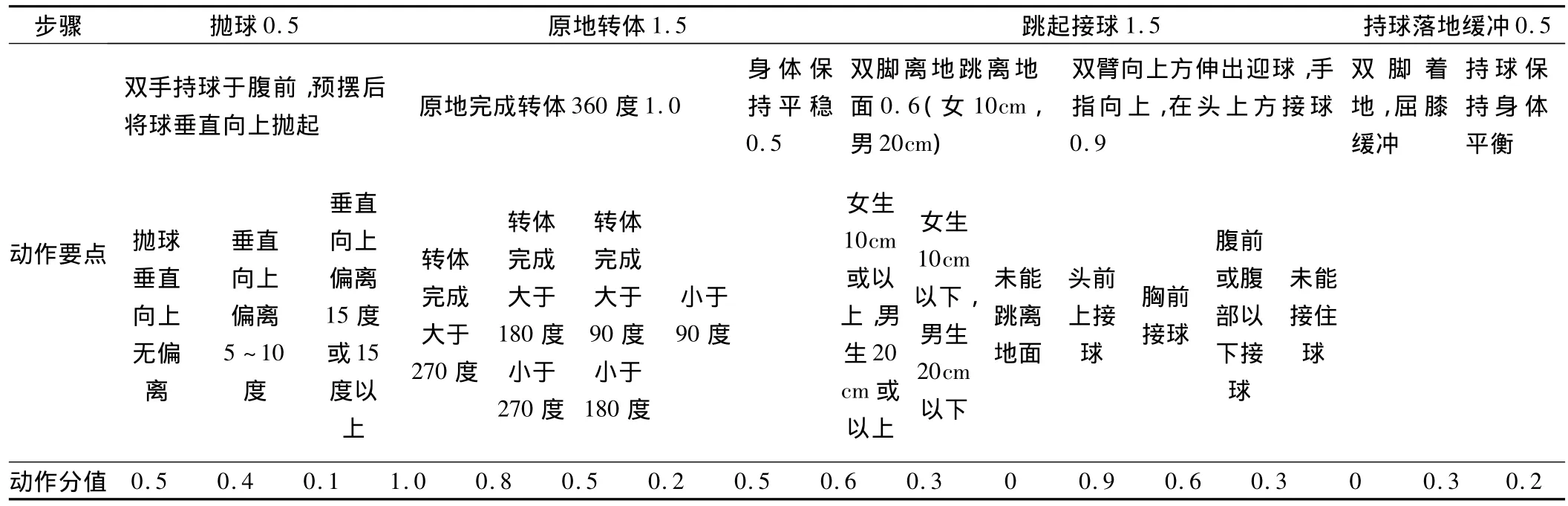
表2 评分方法
由于基础运动技能受到年龄的限制,不同的年龄对某项技能表现不同。每个运动技能群的总分值可能随着年龄的增大而增加。由于基础运动技能群较多,版面有限,仅把研究的第一基础运动技能群的评分标准作为范例,供大家参考。
5 结论
基础运动技能群是对各项运动技能学习的基础,是各项运动技术的学习不可逾越的辅助工具。基础运动技能难以计数,在有限的学习阶段完全掌握是不现实的。因此,系统发展基础运动群,对学校体育发展具有重要作用。本研究基于国内外运动技能发展理论,构建了基础运动技能群模型,设计了相关评价指标,提出基础运动技能群的评价方法。此研究对如何组织基础运动技能教学及达成各项教学目标具有重要指导价值,对基础运动机能群测量评价奠定了坚实理论基础。
[1]J.H.Carr,R.B.Shepherd.Movement science:Foundations for physical therapy[M].Rockville,MD:Aspen,2000:111-187.
[2]Fleishman E.A.On the relationship between abilities,learning,and human performance[J].American Psychologist,1972,27:1017-1032.
[3]Adams A.A.Closed loop Theory of Motor Learning[J].Journal of Motor Behavior,1971,3:111-149.
[4]Schmidt R.A.Motor Control and Learning:A Behavioral Emphasis[M].Champaign,IL:Human Kinetics,1982.
[5]O.G.Meijer.,K.Roth.Complex motor behavior:The motoraction controversy[M].Amsterdam:Elsevier,1988:3-44.
[6]Kelselso J.A.,S.Zanone,P.G.Coordination dynamics of learning and transfer across different effectors’ systems[J].JournalofExperimentalpsychology:Human Perception and Performance,2002,28:776-797.
[7]Wenderoth N.,Bock O.,Krohn R..Learning a new bimanual coordination pattern is influenced by existing attractors[J].Motor Control,2002,(6):166-182.
[8]G.H.Steward,J.P.Steward:Current Psychological Issues[M].New York:Holt Rinehart& Winston,1958:146-183.
[9]Bryant W.L.On the development of voluntary motor ability[J].American Journal of Psychology,1892,5:123-204.
[10]Swift E.J.Studies in the psychology and physiology of learning[J].American Journal of Psychology,1903,14:201-251.
