空间相机调焦机构运动同步性误差分析
2013-04-27刘炳强李景林许艳军
刘炳强,张 帆,李景林,许艳军,孙 斌
(中国科学院长春光学精密机械与物理研究所,吉林长春130033)
空间相机调焦机构运动同步性误差分析
刘炳强*,张 帆,李景林,许艳军,孙 斌
(中国科学院长春光学精密机械与物理研究所,吉林长春130033)
研究了空间相机调焦机构的运动同步性误差对成像质量的影响。针对某型空间相机的大尺寸焦面调焦机构,分析了运动同步性误差产生的原因。按照其光学系统参数计算得出当系统光学传递函数下降不超过5%时,调焦机构运动同步性误差的最大允许值为0.02 mm。针对其采用的调焦机构,推导出运动同步性误差计算公式,并计算得到该调焦机构的最大运动同步性误差为0.015 mm。最后,对该调焦机构进行了实际测试。测试结果显示,该调焦机构的运动同步性误差在振动实验前后分别为0.012和0.013 mm,表明该机构的运行非常稳定。理论分析以及实验结果证明了该调焦机构完全满足应用要求。
运动同步性误差;调焦机构;偏心轴;空间相机
1 引 言
空间相机在地面研制到在轨工作的过程中,要经历复杂的力学和热环境,各个光学元件以及焦面组件的尺寸和位置会发生变化,从而使光学系统的焦面和成像器件(CCD靶面)位置发生偏离,即产生离焦现象,进而使得相机的成像质量大大降低。通过调焦来补偿这种偏离,可以明显提高相机的成像质量。
广义的调焦包括调整光学元件位置和调整焦面组件位置。对于某型采用离轴光学系统的空间相机而言,系统光学传递函数对各个光学元件的位置变化极为敏感,不可能用于调焦。而相机的焦面长度超过600 mm,也不可能附加调焦镜。因此,该型空间相机多采用偏心轴加直线导轨的单电机驱动机构形式,通过调整焦面组件位置来实现高精度调焦[1-6]。
在调焦机构的设计中,工作行程(调焦范围)和调焦精度是主要指标。调焦精度指标包括:(1)调焦机构定位精度,它主要由驱动电机和编码器的精度决定;(2)调焦机构的运动同步性误差。由于该型空间相机焦平面的跨距大,调焦机构零部件存在制造和装配误差,不可避免会产生运动同步性误差。调焦机构的运动同步性误差也会对调焦精度产生较大影响。本文首先计算了在保证该型空间相机成像质量时,运动同步性误差的最大允许值。在分析了该型调焦机构运动同步性误差产生原因的基础上,推导出运动同步性误差计算公式,并对该调焦机构的运动同步性误差进行了理论计算,最后通过将调焦机构实际测量与理论计算进行对比,验证了该型调焦机构可以满足使用要求。
2 调焦机构原理
该型空间相机调焦机构主要由电机、偏心轴、联接部件、轴承、直线导轨、制动器和编码器等零部件组成。图1为调焦机构简图。工作时按照控制指令,电机、编码器、制动器上电,制动器打开,电机带动偏心轴旋转,偏心轴推动联接部件在直线导轨的约束下带动焦面板沿光线方向做直线运动,同时编码器计数;当运动到指定位置时,编码器将信号返回到控制系统,制动器关闭并且电机下电,相机完成一次调焦。

图1 调焦机构简图Fig.1 Schematic diagram of the focusingmechanism
由图1可知,焦面板的位置可用下式表示:

式中:H为焦面板的位置;a为偏心轴颈的偏心距;θ为偏心轴的转角;R为偏心轴颈的半径;S为联接部件高度。在该调焦机构中,a=2 mm,保证其可以实现±2 mm范围的调焦。
调焦机构工作时,焦平面的位置误差和空间角度的变化都会引起离焦量,进而对成像造成影响。前者主要取决于调焦机构的定位精度,后者则是调焦机构运动同步性误差导致的。确定离焦传递函数计算公式为:

式中:ρ为空间频率,D为离焦引起的弥散圆直径,J1为一阶贝塞尔函数。令ρ=50 lp/mm,根据该型空间相机光学系统参数,计算得出当调焦引起的光学传递函数下降不超过5%时,焦平面的离焦量不超过0.03 mm。离焦量主要由调焦机构的定位精度和运动同步性误差组成。该调焦机构采用的步进电机的步进角为1.8°,匹配的减速器速比为100∶1,所以偏心轴可以获得的最小步进角为1′。另外,该调焦机构采用的是14位绝对式编码器,其分辨率为1.4′。由文献[4]可知,通过编码器和步进电机的选择,可以使调焦机构的定位精度小于0.01 mm。所以,该焦平面的同步性运动误差不能超过0.02 mm。
3 同步性误差分析
3.1 同步性误差产生的原因
在调焦机构运转时,由于零件制造误差和装配误差的存在,图1中的D1、D2两处位置随着偏心轴的转角θ变化,两者的差值定义为调焦机构的运动同步性误差[7-9]。运动同步性误差是偏心轴转角θ的函数。
对于本文中的调焦机构,其运动同步性误差主要是由左右偏心轴部位的精度决定的。图2为该调焦机构偏心轴的结构图。该精度主要包括以下部分:
(1)左右偏心轴颈的偏心距之差是调焦机构运动同步性误差的直接原因,记左右偏心轴颈的偏心距为a1、a2。
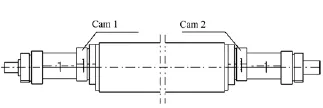
图2 偏心轴结构图Fig.2 Structure diagram of the eccentric shaft
(2)两个偏心轴颈的相位差也会影响运动同步性误差。如图3所示,记二者的相位差为δD。

图3 偏心轴相位差对升程影响Fig.3 Effect of eccentric shaft phase difference on the lift
(3)偏心轴颈处安装轴承,轴承的径向跳动精度、轴承装配间隙也会影响同步性误差。由于这几项误差的分布有随机性,本文将这几项误差统一用偏心轴颈的半径误差表示,显然它也是偏心轴转角θ的函数,记为左右偏心轴颈的半径误差分别为R1(θ)、R2(θ)。
(4)在调焦机构装配完成后,虽然左右联接部件也存在误差,但是该误差为定值,通过修研可以去除,该值对调焦机构的运动同步性误差没有影响。
综上所述,该型调焦机构的运动同步性误差主要来自于偏心轴的制造误差、所选用轴承的误差以及装配误差。
3.2 同步性误差计算
由上述可知,调焦机构的运动同步性误差可表示为:

利用级数展开:
cos(θ+δθ)=cosθ-sinθ×δθ+…
取前两项,带入式(3):

式(4)即为该调焦机构运动同步性误差计算公式。其中,第一项表示左、右偏心轴颈偏心距差值对同步性误差的影响;第二项表示左、右偏心轴颈相位差值对同步性误差的影响;第三项表示左、右偏心轴颈的半径误差对同步性误差的影响。
偏心距公差和左、右偏心轴颈的相位差可以由偏心轴设计要求得到。如前所述,半径误差包

图4 同步性误差理论曲线Fig.4 Theoretical curve of the synchronous motion error
括轴承径向跳动精度、轴承安装间隙等项。通过产品技术手册,轴承的径向跳动精度公差在4μm以内,轴承安装间隙为1~3μm。由于这几项误差分布具有随机性,本文将偏心轴颈的半径误差记为最大值8μm,且是偏心轴转角θ的余弦函数,即R1(θ)/2-R2(θ)/2=8cosθ。将上述值带入式(4),利用Origin软件绘制如图4曲线,焦平面同步误差最大为0.015 mm,满足该型空间相机设计要求。
4 实际测试与结果
该型调焦机构装配完成后,在进行振动试验前,对其运动同步性误差进行测试,测试现场如图5所示。测试时所采用的数显表精度为0.5μm。通过控制系统控制调焦机构运行,偏心轴每转1°,控制系统采集一次数显表读数并自动记录。
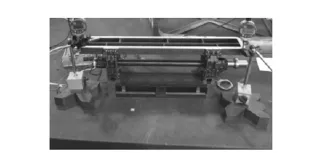
图5 同步性误差现场测试Fig.5 Field tests of the synchronousmotion error
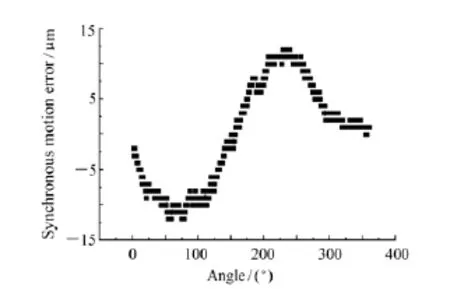
图6 振动前运动同步性误差实际测试曲线Fig.6 Actual test curve of the synchronousmotion error before vibration test
调焦机构运行一周后,将记录的两数显表示数对应相减,以该差值为纵坐标,偏心轴转角为横坐标,绘制曲线如图6。从图中看出,实际测试曲线与理论值曲线非常吻合,实际测试的运动同步性误差最大值为0.012 mm,小于理论计算得到的0.015 mm。产生这种现象的原因主要是:理论分析时将轴承径向跳动误差、轴承安装间隙按照最大值叠加,并且按照余弦函数拟合,实际上这三项误差的分布具有随机性,在安装过程中由于峰值相互错开,使得总的误差值反而会减小。
对调焦机构进行正弦振动试验。结果表明,该调焦机构的X、Y、Z方向的一阶频率均大于200 Hz,该机构具有良好的动态刚度[10]。
在振动试验后,重新对调焦机构的运动同步性误差进行实际测试,所采用的方法与之前相同,得到的曲线如图7所示。结果表明,振动实验后,该调焦机构的运动同步性误差为0.013 mm,与振动实验前相比基本没有变化。表明该机构的运行稳定性非常好。
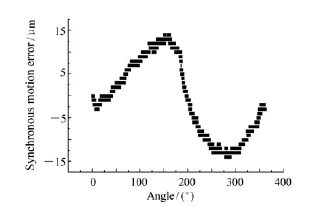
图7 振动后运动同步性误差实际测试曲线Fig.7 Actual test curve of the synchronousmotion error after vibration test
5 结 论
本文针对某型空间相机的大尺寸焦平面调焦机构,分析了同步性误差产生的原因,并推导出计算同步误差的公式。理论计算得到该调焦机构的运动同步性误差为0.015 mm,满足离焦光学传递函数影响小于5%的要求。针对调焦机构的实际测试表明,振动实验前后,其运动同步性误差为0.012和0.013 mm,表明该调焦机构运行非常稳定。理论分析以及实际测试表明,该调焦机构完全满足应用要求。
参考文献:
[1] 王智,张立平,李朝辉,等.传输型立体测绘相机的调焦机构设计[J].光学精密工程,2009,17(5):1051-1056. WANG ZH,ZHANG L P,LIZH H,et al..Design of focusing mechanism of space tridimensionalmapping camera[J]. Opt.Precision Eng.,2009,17(5):1051-1056.(in Chinese)
[2] 丁亚林,田海英,王家骐.空间遥感相机调焦机构设计[J].光学精密工程,2001,9(1):35-38. DING Y L,TIANH Y,WANG JQ.Design on the focusingmechanism of space remote-sensing camera[J].Opt.Precision Eng.,2001,9(1):35-38.(in Chinese)
[3] 贾学志,王栋,张雷,等.轻型空间相机调焦机构的优化设计与精度试验[J].光学精密工程,2011,19(8):1824-1831. JIA X ZH,WANG D,ZHANG L,et al..Optimizing design and precision experiment of focusingmechanism in lightweight space camera[J].Opt.Precision Eng.,2011,19(8):1824-1831.(in Chinese)
[4] 张新洁,王树清,颜昌翔.空间相机调焦机构的设计与分析[J].中国光学与应用光学,2010,3(5):462-466. ZHANG X J,WANG SH Q,YAN CH X.Design and analysis for focusing mechanism of space camera[J].Chinese J. Opt.Appl.Opt.,2010,3(5):462-466.(in Chinese)
[5] 卢振华,郭永飞,李云飞,等.利用CCD拼接实现推扫式遥感相机的自动调焦[J].光学精密工程,2012,20(7):1559-1565. LU ZH H,GUO Y F,LIY F,et al..Realization of auto-focus on APRC using CCD stitching[J].Opt.Precision Eng.,2012,20(7):1559-1565.(in Chinese)
[6] 刘磊,曹国华.大视场长焦面光学遥感器双凸轮式焦面调焦机构[J].光学精密工程,2012,20(9):1939-1944. LIU L,CAO G H.Double cam focusingmechanism of space camera with wide field and long focal plane[J].Opt.Precision Eng.,2012,20(9):1939-1944.(in Chinese)
[7] 王书新,李景林,刘磊,等.大尺寸焦平面空间相机调焦机构的精度分析[J].光学精密工程,2010,18(10):2239-2243. WANG SH X,LI JL,LIU L,et al..Accuracy analysis of focusingmechanism in space camera with long-focal-plane[J]. Opt.Precision Eng.,2010,18(10):2239-2243.(in Chinese)
[8] 惠守文,远国勤,丁亚林,等.等径共轭调焦凸轮机构的精度分析及优化设计[J].光电工程,2010,37(5):133-138. HUISHW,YUAN GQ,DING Y L,etal..Accuracy analysis and optimization design of constant-diameter conjugate focusing cam[J].Opto-Electronic Eng.,2010,37(5):133-138.(in Chinese)
[9] 毛英泰.误差理论与精度分析[M].北京:国防工业出版社,1982. MA0 Y T.Error Theory and Precision Analysis[M].Beijing:National Defence Industry Press,1982.(in Chinese)
[10] 王永宪,王兵,任建岳.空间光学遥感器调焦机构组件力学特性分析[J].光学技术,2009,35(5):796-798. WANG Y X,WANG B,REN JY.Space optics remote sensor focusing componentsmechanics characteristic analysis[J]. Optical Technique,2009,35(5):796-798.(in Chinese)
Analysis of synchronousmotion error for focusingmechanism of space camera
LIU Bing-qiang*,ZHANG Fan,LIJing-lin,XU Yan-jun,SUN Bin
(Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China)
*Corresponding author,E-mail:saiwaisuhang@gmail.com
The effect of synchronousmotion error for the focusingmechanism of a space camera on the image quality is explored.For a large size focusingmechanism,the paper analyzes the reasons causing the synchorman motion error.According to the optical system parameters of a certain space camera,it draws a conclusion thatwhen the Modulation Transfer Function(MTF)of the optical system declines nomore than 5%,the allowablemaximum error of synchronousmotion is 0.02 mm.Then,based on the focusingmechanism,we deduce the formula of synchronousmotion error and calculate that themaximum error of synchronousmotion is 0.015 mm.Finally,the actual errors of synchronous motion before and after a vibration test are measured to be 0.012 mm and 0.013 mm respectively,which indicates that the focusingmechanism has great stability.Both the theoretical analysis and the experiments demonstrate that this focusingmechanism meets the requirements of practical application quite well.
synchronousmotion error;focusingmechanism;cam;space camera
V447.3
A
10.3788/CO.20130606.0946

刘炳强(1986—),男,内蒙古扎兰屯人,硕士,2009年于上海交通大学获得学士学位,2012年于中国科学院长春光学精密机械与物理研究所获得硕士学位,主要从事空间遥感器结构设计分析方面的研究。E-mail:saiwaisuhang@gmail. com

许艳军(1976—)男,内蒙古赤峰人,硕士,助理研究员,2001年、2006年于吉林大学分别获得学士、硕士学位,主要从事空间遥感器CAE分析方面的研究。E-mail:xuyj@ciomp.ac.cn

张 帆(1979—),男,辽宁锦州人,博士,2003年于宁波大学获得学士学位,2008年、2011年于中国科学院长春光学精密机械与物理研究所分别获得硕士、博士学位,主要从事空间遥感器结构设计分析方面的研究。E-mail:fzhang0318 @gmail.com

孙 斌(1983—),男,辽宁丹东人,硕士,2006年于吉林大学获得学士学位,2009年于中国科学院长春光学精密机械与物理研究所获得硕士学位,主要从事空间遥感器结构设计分析方面的研究。E-mail:sunbin231@126.com

李景林(1963—),男,吉林长春人,研究员,硕士生导师,主要从事空间相机光机结构方面的研究。E-mail:aq0183@ 126.com
1674-2915(2013)06-0946-06
2013-09-11;
2013-11-17
国家高技术研究发展计划(863计划)资助项目(No.863-2-5-1-13B)
