一种基于ABT树的忽略缓存算法
2013-04-25刘宏义
肖 瑜,刘宏义,杨 明
(中国人民解放军边防学院 战术教研室,陕西 西安710108)
计算机体系结构所描述的多级存储系统正不断变得越来越慢、越来越大。这个多级存储系统包括寄存器、一级缓存、二级缓存、主存和硬盘。它们的访问时间从寄存器的一个存储周期,增长到了缓存、主存和硬盘各自的10、100和100 000个存储周期。从当前CPU及内存的发展情况来看,那些不能充分利用这个多级存储结构的算法,会有更多的缓存缺失,从而造成更严重的后果。为了解决这个问题,文献[1]提出了忽略缓存的算法。该算法的核心思想是在不需要预知存储块大小的情况下优化I/O模型的方案。
1 内存结构
大多数算法都会忽略内存结构。如二叉树,在访问它们的数据时会遭受严重的性能下降。每一个内存层都是以相似的方式工作,并由缓存块组成。当前的内存结构使用的缓存行的大小是32~64个Byte,通过访问同一个缓存行中的数据,可以获得明显的性能提升[2-3]。缓存的管理要选择合适的替换和关联策略。有时,缓存缺失是不可避免的,例如强制缺失、容量缺失、冲突缺失[4]空间的排列对缓存的使用影响较大。特别要注意的是,密集使用指针的数据结构并不是好的选择。可能需要一起访问的指针或数据,最好也保存在一起,这样可以优化内存的访问[5-6]。在某些情况下,它们也许无法遵从面向对象编程的方法论。Van Emde Boas布局[7]是一个内存中编排出平衡树的标准方法,如图1所示。在忽略缓存的模型中,使用它可以高效地遍历从根节点到叶子节点的每一条路径,其时间复杂度为O(4×logB(N))次内存传输,其中B=NbElement/CacheLine。
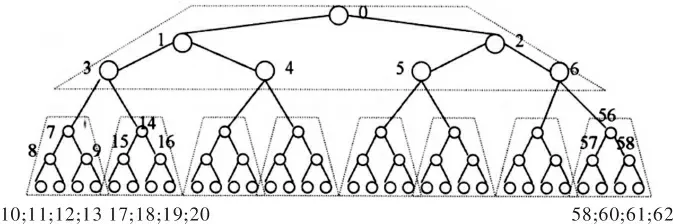
图1 Van Emde Boas树的表示法
2 实现ABT树
ABT树与KD树类似[8]。在每个构建步骤中,沿坐标轴的分割平面会分割出两个子节点。与KD树有一点不同的是,ABT树的算法可以将分割产生的子节点的AABB盒最小化,并将所有几何体独占式地存储在叶子节点中。这样,每个节点就变成了空间中一个完全封闭的区域。在这个空间中,会遍历这些内部节点,将场景中的不可见部分剔除。
2.1 ABT树的创建
创建ABT树是从一个根节点开始,这个根节点包含一个对整个场景AABB盒的引用。递归创建法会用一个轴向上的分割平面,将局部当前节点的AABB盒分割成两个部分(2个面),然后根据它们的中间层,把这两个面分别分配给两个子节点,如图2所示。

图2 沿坐标轴的包围盒的重新调整
一旦所有面都分配完毕,每个子节点就会重新计算它们各自的、含有这个层中独一无二的面的AABB盒,分割策略会尽量将下列属性最小化。
空间局部化,如式(1)所示

树的平衡性,如式(2)和式(3)所示

在性能出现显著降低之前,Epsilon应该维持在5%~10%以下。在多数情况下,将AABB场景复杂度扩展5%,就可以包含90%的面,如式(4)和式(5)所示
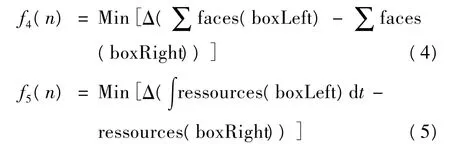
最后的公式如式(6)所示

根据游戏引擎的瓶颈和场景的组织,公式中各项的权重会有所变化。在预处理阶段和运行时,采用的方法也不同。在运行时,在不同的渲染阶段,每个视点通常都会执行一个完全或部分的遍历。从上一个局部根节点开始,递归函数会检测两个子节点是否位于视锥内部,如果确实位于视锥内部,那就继续执行树的遍历。当遍历到一个叶子节点时,它包含的所有几何体都可以传送到渲染管道中的下一个阶段。由于每个面都是独一无二的,所以不需要进行额外的测试。还可为叶子节点和局部素材维护一个微小的顶点缓冲器。为了减少所使用的顶点缓冲器的数量,我们可以从邻居子节点的位置中获益。因此,几个叶子节点可以共享一个单独的顶点缓冲器,只要不超出顶点缓冲器的容量限制即可。这样一来,当几个邻居节点需要一起处理时,就可以获得更高效的分支处理,提高渲染性能[9]。
2.2 效率和复杂度
所有二叉树,特别是BSP树和KD树,都会受到树的深度困扰。即使ABT树的处理能力优秀,树的深度也依然是个重要问题。假设树的实现是使用指针,而不是隐式指针,那么可以认为每当树要沿用一个指针时,就会发生CPU的缓存缺失。相对于树的深度,缓存缺失的数量会相应地增加到一个极限值,这时缓存缺失变得比交叉检测的代价还大。然而,忽略缓存的树会减少与缓存行大小有关的缓存缺失,树的遍历工作也变得对内存访问而不是对CPU性能不太敏感了。
与所有的二叉树一样,ABT树也需要一个O(logn)的搜索时间[10]。通过使用Van Boas忽略缓存的布局表示法,搜索时间可以估算为O(4×logB(n))。其中,B=CoupleNode÷CacheLines如图3所示[11]。
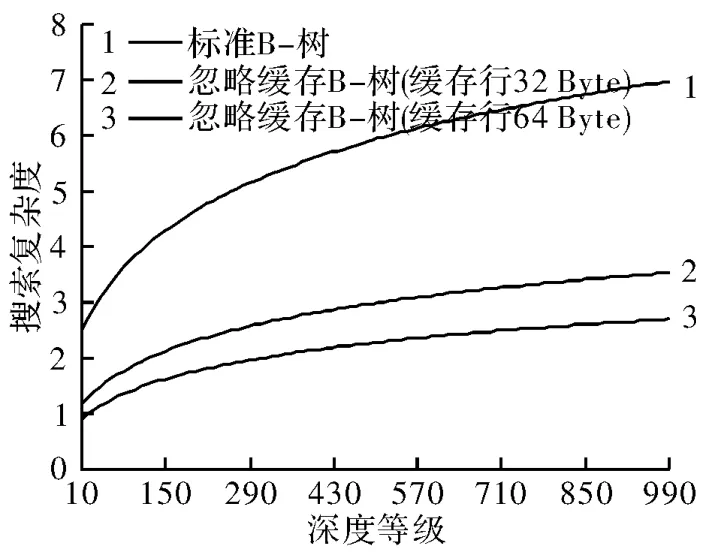
图3 搜索时间排序
每个节点需要存储各自的局部AABB盒和一个指向其两个子节点的指针。AABB盒由6个浮点值表示是6×4个Byte,指向两个子节点的指针是2×4个Byte(32位CPU),或者2×8个Byte(64位CPU)。这样每个节点的内存总需求是32个Byte(32位CPU),或者40个Byte(64位CPU)。如果使用一个不成熟的算法,内存消耗相对更重要。文献[12]指出只需保存每个子节点AABB盒的相对范围(Extent),可以把每个范围压缩成一个8位的整数值。这个谨慎的估算方法只有1/255,也就是约0.4%的相对误差,完全可以被平均5%~10%的AABB重叠率覆盖。
2.3 冗余技术
为减少内存开销,在每次分割时,定义子节点AABB盒12个范围(Extent)中的6个直接来自父节点,因为父节点包含的所有面都会被分割、传递给叶子节点。不是单独为每个子节点保存几个Byte的信息,而是把两个子节点保存为一个整体。这样,就不用局部地保存每个子节点AABB盒的绝对数据,取代它的是每对子节点都会保存它们相对于父节点AABB盒的一个比例。因此,需要有6个Byte来表示子节点的相对比例。通过不同特征指定的另一个Byte会使用两个子节点的相对位置,并再次使用父节点的相关数据。在运行时的遍历过程中,递归方法会重新计算子节点局部AABB盒的位置。因为在此阶段最后一个Byte还有两位没有用到,所以就用这两位来说明左/右子节点是右节点还是叶子节点,如图4所示。
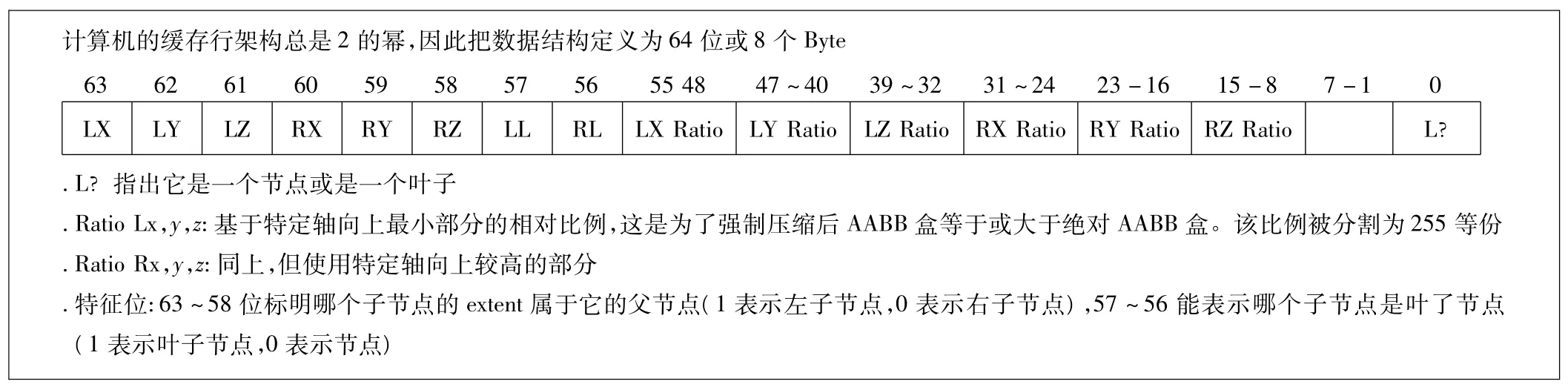
图4 ABT树的节点数据表示(一对子节点)
为了遵守忽略缓存算法的数据结构定义,把这些数据都保存为8个Byte的一个值,为树本身留下7个未使用的位(bit)。例如,可以使用这7个位(bit)来标识是否加载了下列子树(Subtree),这对流(Streaming)应用具有一定价值。最后,因为子树总是2的幂减去1,且缓存行的大小也总是2的幂,所以有8个Byte可以用来把这棵子树链接到下一棵子树。由于打算用隐式指针来表示这种分级,所以用4个Byte来保存第1个可用子节点的索引。另外4个Byte中,有些位用来说明哪个端节点(End node)连接在子节点的子树上。根据不同缓存行的大小,有些位可能仍然未被使用,如图5所示。
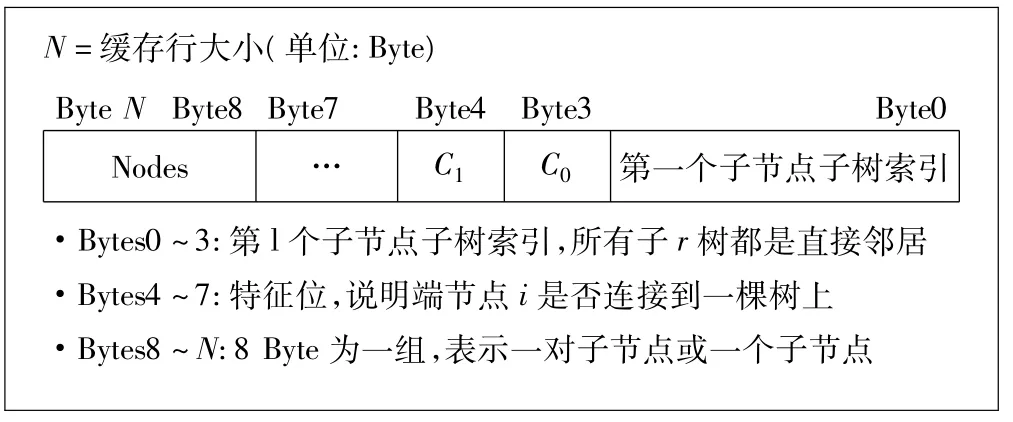
图5 缓存行的组织结构
当上一棵子树的所有子树都成为直接邻居时,这个创建过程就完成了,如图6所示。考虑叶子节点,它也是由8个Byte组成。一个位用来表示它的条件,在32位系统中,31个位就足够了,留出4个Byte可以用来保存其他的附加信息。
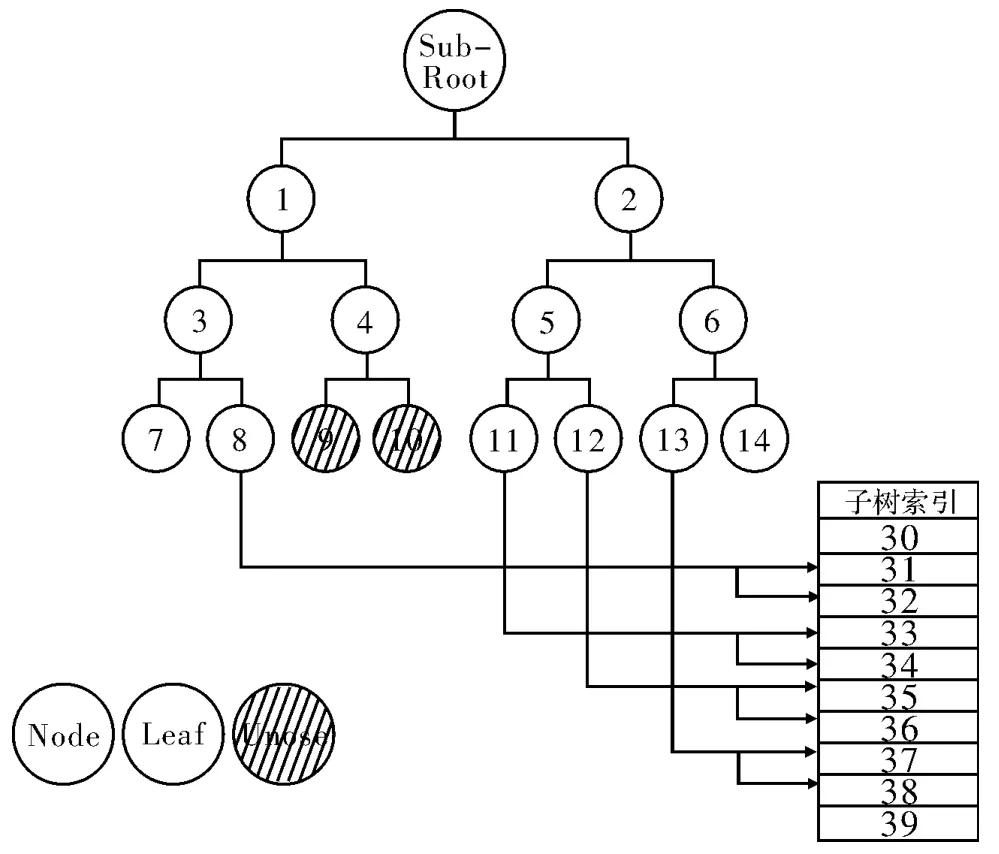
图6 子树的组织结构以及到次级子树的链接
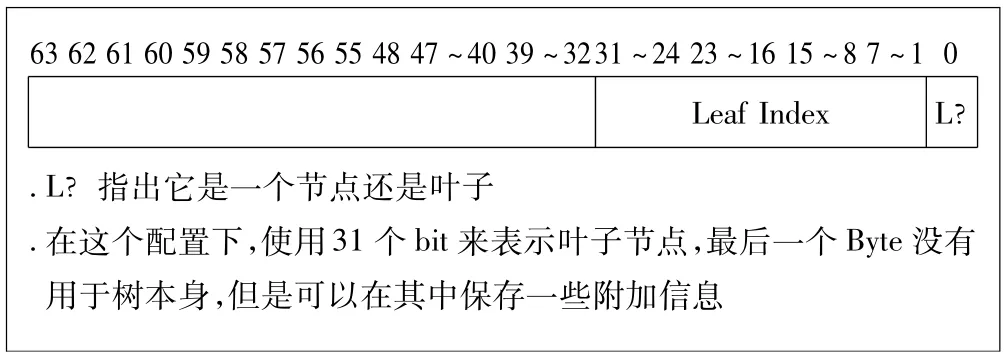
图7 ABT树的叶子节点的数据表示
2.4 性能分析
为了分析这种方法的性能,使用了3个不同的实现算法进行实验,其内存使用情况如图8所示。直觉算法:6×4个Byte用来保存AABB盒,8个Byte用于保存指向子节点的指针,或者用64个Byte保存一对子节点。

图8 3个不同实现算法的内存使用情况
采用冗余技术:8个Byte用来保存AABB盒,8个Byte用来保存指向子节点的指针,或者48个Byte用来保存一对子节点。
忽略缓存算法(缓存行大小为64个Byte):每一对节点需要8个Byte,外加8/7个Byte用来保存隐式指针,平均下来是9.14个Byte。全局内存需求取决于树的平衡性,如图6所示。
3 结束语
虽然本文专注于讨论剔除算法,但ABT树在其他领域也是具有一定作用的,包括AI和3D音效管理。当前的硬件技术发展,CPU的速度会大幅提升,但是内存的发展却相对滞后,计算机的性能将会变得越来越依赖于内存访问,而不是单纯的CPU原始性能。实时仿真需要大量的数据集,而内存瓶颈会成为它的限制,CPU发展所带来的优点也会因此而弱化。但是,忽略缓存的算法具有良好的适应性,它为缓存感知算法提供了一个优良的替代方案,且二者的性能基本相同。
[1]FRIGO,LEISERSON,RAMACHANDRAN P.Cache-oblivious algorithms[C].In Proc.40th Annual Symposium on Foundations of Computer Science(EOCS),1999:285-297.
[2]PATTERSON,HENNESSY.Computer organization and design the hardware/software interface[M].USA MA:Morgan Kanfmann,1997.
[3]HENNESSY,PATTERSON.Computer architecture:a quantitative approach[M].USA MA:Morgan Kaufmann Publishers Inc,2003.
[4]HILL L.Cache performance[D].USA Ulta:University of Wisconsin—Madison,2002.
[5]ERICSON,CHRISTEr.Memory optimization[C].CDC2003,Santa Monica:Sony Computer Entertainment,2003.
[6]DING C.Data layout optimizations,computer organization[M].NY:Lecture,Rochester,2004.
[7]VAN EMDE P BOAS.Preserving order in a forest in less than logarithmic time and linear space[C].Information Process Letter,1977(6):80-82.
[8]SZECSI.An effective implementation of the K-D yree[M].USA:In Graphics Programming Methods,Charles River Media,2003.
[9]WLOKA MATTHIAS.Batch,batch,batch:what does it really mean?[C].Presentation at Game Developers Conference,2003.
[10]SEDGEWICK.Algorithm s in C[M].USA:Addison Wesley,1990.
[11]BRODAL.Cache oblivious searching and sorting[M].Copenhagen,Denmark: Seminar,ITUniversity of Copenhagen,2003.
[12]GOMEZ,LOURA.Compressed axis-aligned bounding box trees[M].Copenhagen,Denmark:Charles River Media,2001.