一种新型PWM直流电机驱动器的研究
2013-04-25王宇野
魏 燊,王宇野
(哈尔滨工程大学 信息与通信工程学院,黑龙江 哈尔滨150001)
现代电气传动广泛采用全控型电力电子器件组成的PWM变换器拓扑。经典的直流电机或交流电机驱动[1]:一般采用工频交流电经不可控整流和无源电容滤波后获得比较平滑的直流电,由4只电力电子器件组成的H桥或由6只电力电子器件组成的双H桥PWM变换器拓扑结构分别驱动直流电机和交流电机。为获得较为平滑的直流电,在直流母线中间级并联较大的无源电容,该电容主要起到滤波、储能和提供无功缓冲作用。电动负载模拟器[2-3]是被动式转矩伺服系统,舵机拖动加载电机作主动位置伺服运动,对加载电机而言,其运动是被动的,在运动中为舵机实现有效载荷谱加载。加载电机存在电动和回馈制动两种运行状态,在回馈制动运行时,制动电流通过PWM变换器开关器件反并联二极管续流回馈给直流母线电容,制动能量的不断积累,导致直流母线电压发生泵升,该能量泄放一般通过并联在直流母线的制动电阻实现[4]。研究表明,加载电机制动能量的快速有效地泄放和制动电流有效地控制,对实现加载转矩平滑换相、拓宽加载系统的加载频宽以及提高加载精度均有着重要的工程实用价值。其中,通过电阻将能量消耗掉是相对简单的方法。
1 基本结构
耗散型PWM变换器结构如图1所示。

图1 系统主电路拓扑结构图
以驱动直流伺服电机为例,图中Ud为直流电源,Q1和Q3为超前桥臂,Q2和Q4为滞后桥臂,D1~D6分别为Q1~Q4的内部寄生二极管,D5~D8、Q5和电阻R组成双向开关耗散网络,D9和D10为直流伺服电机制动电流阻断二极管[5]。
2 加载方式分析
电机的加载方式有多种,下面主要对无扰恒值加载和无扰正弦加载进行论述分析。
2.1 无扰恒值加载
耗散型PWM变换器[6]控制方式采用双极性控制,变换器功率管驱动波形Q1和Q4、Q2和Q3、Q5、电枢电压ua及电枢电流波形ia如图2所示。
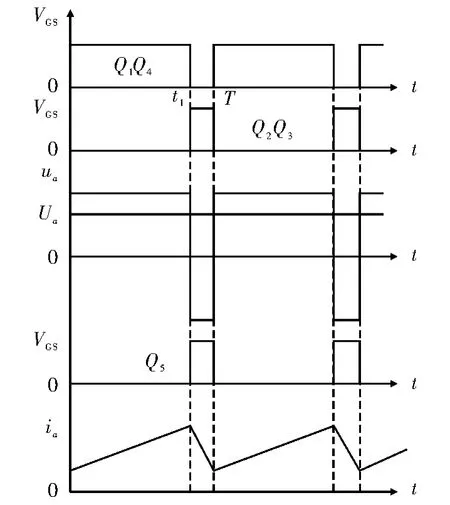
图2 PWM控制波形及电枢电压、电流波形
在分析之前,作如下假设:
(1)所有开关、二极管、电感、电阻均是理想器件。
(2)PWM开关周期远小于电动机的时间常数。
(3)系统工作在准稳定工作状态,电枢电流ia呈周期性脉动变化。
(4)在一个开关周期内,电动机转速的变化可忽略不计。
1)工作模式0[0~t1]。[0~t1],对应于图3(a)。Q1和Q4导通,电流经电源Ud正极经二极管D9、Q1、直流伺服电机、Q4和二极管D10回到电源Ud负极。电枢回路方程为

式中,Ra为电枢电阻;La为电枢电感;Ea为反电动势。
2)工作模式1[t1~T]。[t1~T],对应于图3(b)。Q1和Q4关断,Q2、Q3和Q5导通。由于二极管D9和D10的反向阻断作用,电流经电源Ud正极经D5、Q5、电阻R、D8和直流伺服电机回到电源Ud负极。电枢回路方程为

式中,t'=t-t1。电流ia在最小值与最大值之间脉动,ia1(0)=ia.min,ia1(t1)=ia.max,则由上式可求出t=t1时的电动机电流

图3 工作模式等效电路

则得双极性控制模式带耗散网络PWM控制系统并考虑电气时间常数较小时电枢电流脉动量为

式中,Is=Ud/Ra。由式(7),式(8)可得,制动电流通过双向开关耗散网络变得可控,增加耗散电阻网络电阻阻值,可快速衰减制动电流的幅值和减小电枢电流的脉动,这对电动负载模拟器转矩跟踪控制的快速性和减小脉动均有利,同时该耗散电阻网络为制动电流提供有效制动能量泄放回路,并对提高加载系统的动态响应和加载频宽起着重要作用。
伺服系统动力学方程为
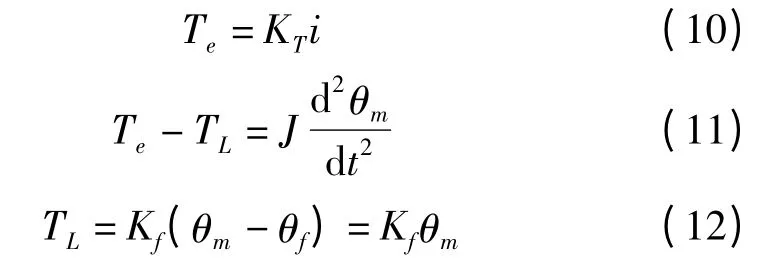
式中,Te为直流电机的电磁转矩;KT为转矩常数;TL为加载转矩;J为传动轴系的转动惯量;θm和θf分别为直流电机和舵机的角位移。由于加载方式为无扰,即θf=0;Kf为加载电机与舵机之间的耦合刚度系数。
无扰恒值加载方式,即给定转矩TL=TLmax。由上述公式可推出加载指令电流为

联立式(1)、式(2)和式(13),调节占空比使电枢电流按照指令电流变化,加载电机输出恒值的加载转矩,从而满足舵机对无扰恒值加载需求。
2.2 无扰正弦工作过程分析
无扰正弦工作过程各种工作模式等效电路如图4所示。PWM控制波形及电枢电压和电流波形如图5所示。
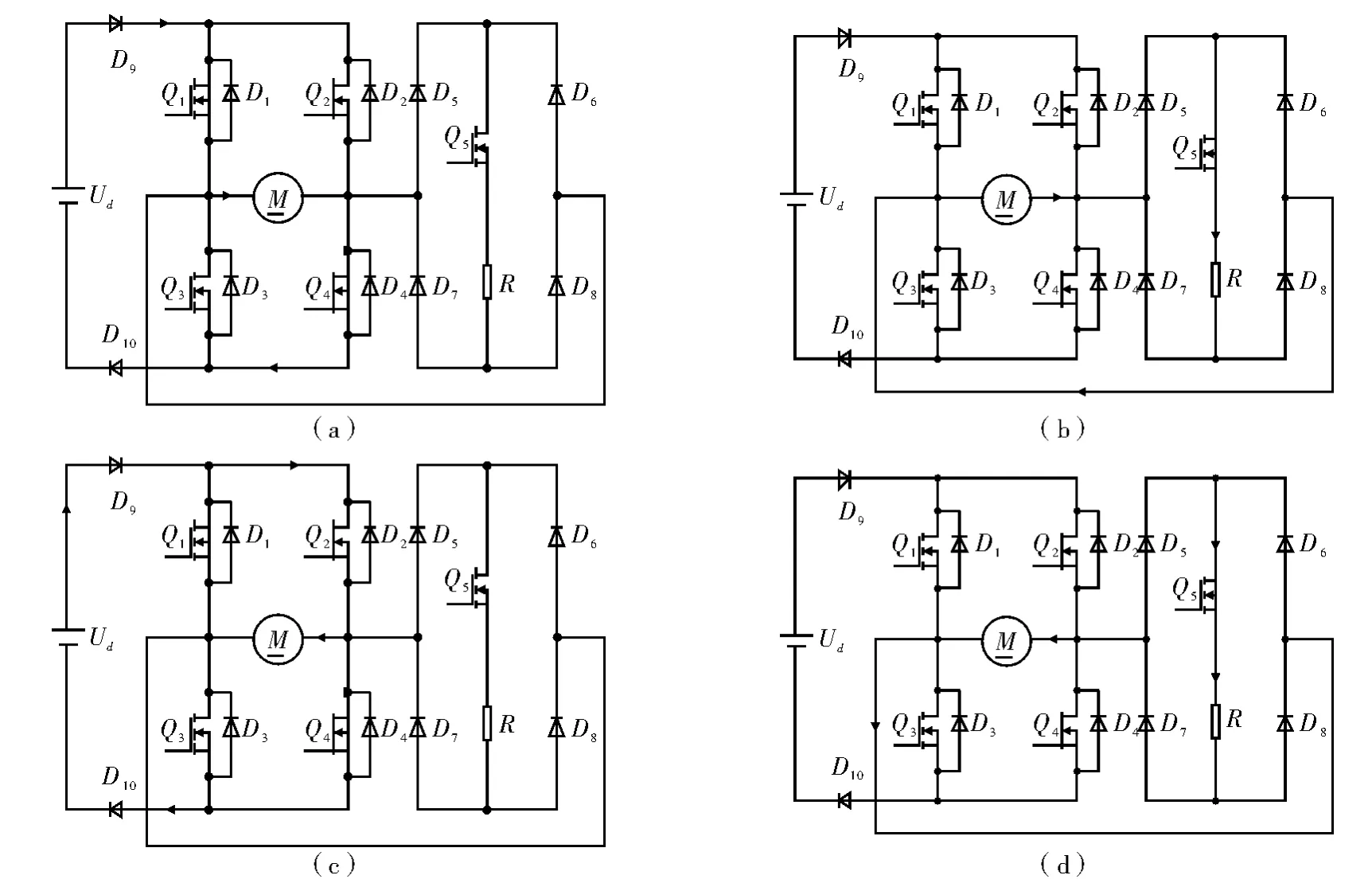
图4 工作模式等效电路
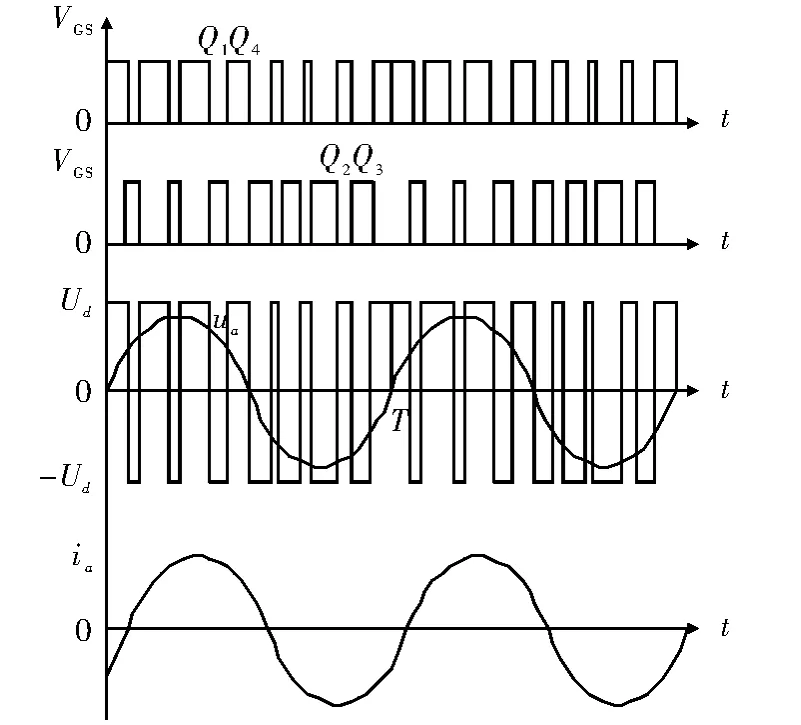
图5 PWM控制波形及电枢电压、电流波形
Q5的驱动脉冲为:当电枢电压通过H桥两电平PWM变换器调制成正弦波时,平均电枢电压ua正半周时,Q5与Q2、Q3驱动脉冲同步;平均电枢电压ua负半周时,Q5与Q1、Q4驱动脉冲同步,下一周期,周而复始。在一个加载周期内,PWM变换器共有4种工作模态:
(1)工作模态0。对应于图4(a)所示。Q1和Q4导通,电流经电源Ud正极经二极管D9、Q1、直流伺服电机、Q4和二极管D10回到电源Ud负极,加载直流电机工作在电动状态。电枢回路方程为

(2)工作模态1。对应于图4(b)所示。Q1和Q4关断,Q2、Q3和Q5导通。由于二极管D9和D10的反向阻断作用,电流经电源Ud正极经D5、Q5、电阻R5、D8和直流伺服电机回到电源Ud负极,加载直流电机工作在反向制动状态,制动电流通路如图所示。电枢回路方程为

当电枢电压被两电平调制成正弦波正半周时,上述工作过程在模态0和模态1之间反复切换,周而复始。
(3)工作模态2。对应于图4(c)所示。Q2和Q3导通,电流经电源Ud正极经二极管D9、Q2、直流伺服电机、Q3和二极管D10回到电源Ud负极,加载直流电机工作在反向电动状态。电枢回路方程为

(4)工作模态3。对应于图4(d)所示。Q2和Q3关断,Q1、Q4和Q5导通。由于二极管D9和D10的反向阻断作用,电流经电源Ud正极经D6、Q5、电阻R5、D7和直流伺服电机回到电源Ud负极,加载直流电机工作在正向制动状态。电枢回路方程为

当电枢电压被两电平调制成正弦波负半周时,上述工作过程在模态2和模态3之间反复切换,周而复始。
在电枢电压为正弦波正半周时,联立求解式(14)和式(15),可求出电枢电压正半周时对应的电枢电流。同理,可求出电枢电压负半周时对应的电枢电流,由于电枢电压是脉动的,电枢电流和加载转矩也是脉动的。
无扰正弦加载方式,即给定转矩TL=±TLmaxsinωt。由式(10)、式(11)和式(12)得,加载指令电流为

联立式(14)~式(18),调节占空比使电枢电流按照指令电流变化,加载电机输出正弦的加载转矩,从而满足舵机对无扰正弦加载的需求。
3 仿真分析
(1)无扰恒值加载实验。舵机为零位置伺服系统,加载系统为舵机施加恒值30 N·m加载转矩。图6为市电经过二极管整流后输出的直流母线电压,该电压保持基准电压90 V,不能超过永磁力矩电机的峰值电压,否则永磁力矩电机将退磁。图7为无扰恒值加载波形,从仿真结果可看出,加载系统为舵机系统施加了平均值为30 N·m的加载转矩,转矩波动6%,满足舵机系统对加载转矩的需求。
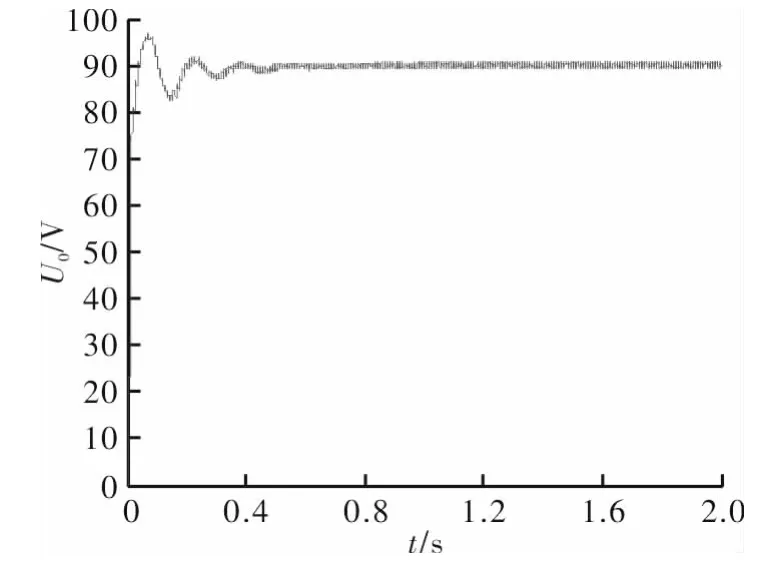
图6 二极管整流后输出直流电压波形

图7 无扰恒值加载波形
(2)无扰正弦加载实验。舵机为零位置伺服系统,加载系统为舵机施加按正弦规律变化且峰值为30 N·m加载转矩。从仿真结果可看出,由于加载系统要为舵机系统施加按正弦规律变化的加载转矩,双极性控制策略对角线开关周期性切换,导致直流母线电压波动较大,波动幅值为基准值的13.6%。但施加舵机的加载转矩波形跟踪特性良好,由于转矩闭环控制,转矩波动有效地被抑制,无扰加载带宽为5 Hz,反映加载系统在无扰情况下的加载潜能。
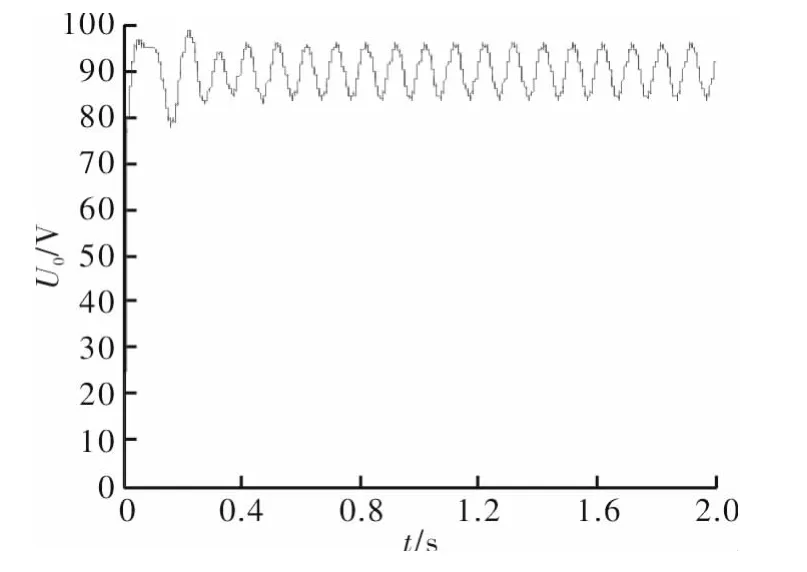
图8 二极管整流后输出直流电压波形
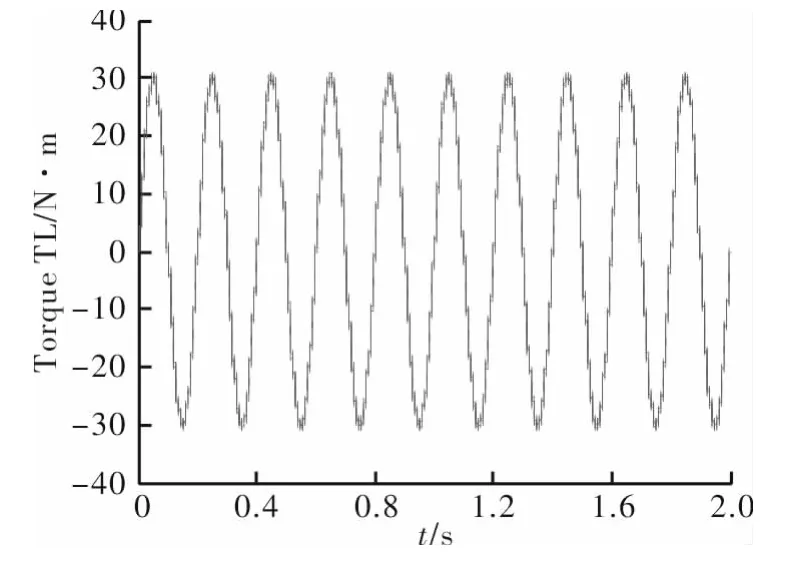
图9 无扰正弦加载波形
4 结束语
文中提出的新型耗散型加载电机PWM变换器拓扑结构,能够为加载电机在制动时提供制动能量通路,加载电机制动能量的快速处理对提高加载系统转矩加载频宽具有重要意义。同时制动电流变得可以控制,使加载转矩在过零时平滑进行换相,提高加载精度。这种拓扑结构具有将制动能量通过后置双向开关消耗在制动电阻上,制动能量以电阻热量的形式耗散掉,该变换器拓扑实现了加载转矩平滑换相和加载转矩准确、快速跟踪给定,并且拓宽了加载频宽。
[1]LIU Yong,ZHU Z Q,DAVID H.Direct torque control of brushless DC drives with reduced torque ripple[J].IEEE Transactions on Industry Applications,2005,41(2):599-608.
[2] 张赟,戚佳金.一种新型电动负载模拟系统加载电机驱动器[J].电子器件,2008,31(3):911-914.
[3] 曹东.加载电机驱动器的结构及控制方法的研究[D].哈尔滨:哈尔滨工业大学,2006.
[4]SONG J H,CHOY I.Commutation torque ripple reduction in brushless DC motor drives using a single DC current sensor[J].IEEE Transactions on Power Electronics,2004,19(2):312-319.
[5] 张赟.能量回馈型加载电机驱动器的研究[D].哈尔滨:哈尔滨工业大学,2007.
[6]孙立志.PWM与数字化电动机控制技术应用[M].北京:中国电力出版社,2008.
