一类复杂系统模型的动力特性及广义控制*
2013-04-24位瑞英
李 银,位瑞英
(1. 韶关学院数学与信息科学学院,广东 韶关 512005;2.中山大学数学与计算机学院,广东 广州 510275)
复杂系统在保密通信、激光物理、化学反应等领域有巨大应用潜力[1-6]。人们不断发现新的复杂系统,研究其分叉、混沌现象、混沌吸引子结构和混沌产生的条件等动力特性与控制问题.如同步控制、模糊控制、反馈控制等[7-13]。
本文针对复杂系统模型的动力特性特性作进一步探讨,利用射影同步控制方法实现该系统的广义同步控制,并利用Maple数值仿真试验,得到有效非线性控制器,验证了其方法的有效性。
1 一类复杂系统模型及其动力特性分析
考虑复杂系统模型[7]:
(1)
(x,y,z)T∈R3为系统的状态变量,当选取a=6,c=-4时,系统处于混沌状态。
1.1 复杂动力性
系统在变换(x,y,z)→(-x,-y,z)下,对所有的参数值保持不变性,具有对称性。系统模型振荡的复杂性和随机性演化时序图如图1。
图1(a),(b) ,(c)分别表示初值(x(0),y(0),z(0))=(3,-4,2)时,x,y和z是随时间变化的曲线。 由图可知,系统变量具有复杂性和随机敏感性。
1.2 耗散性
对于系统(1),计算向量场的散度
故系统(1)是耗散的。体积元V(0)在时间t时收缩为体积元V(0)e-10t,当t→∞时,包含系统轨线的每个小体积元以指数速率10收缩到0,这就意味着系统的动力学行为最终趋向于一个吸引子,该奇怪吸引子形成过程如图2。
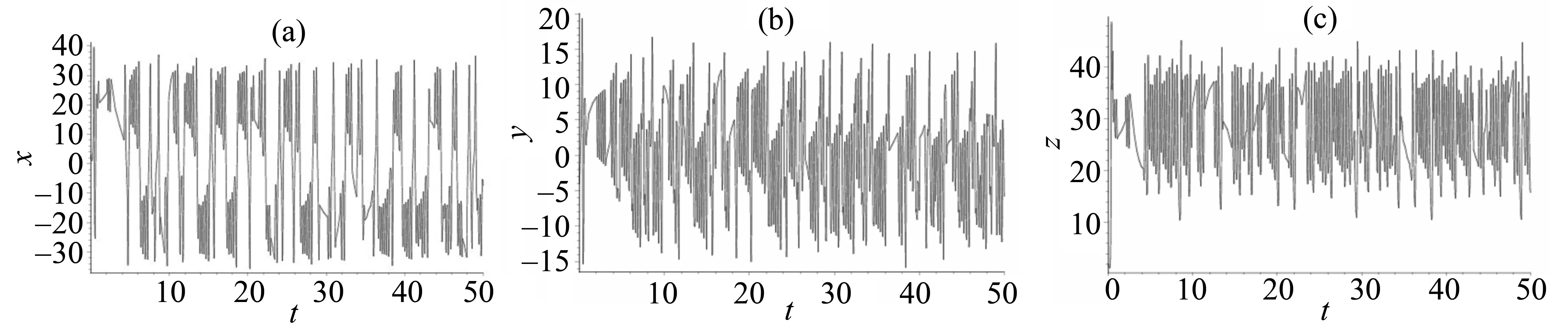
图1 复杂性和随机性Fig.1 Complex complexity and randomicity
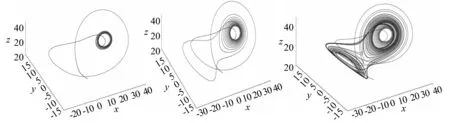
图2 系统模型(1)奇怪吸引子形成的渐进过程Fig.2 System model (1) strange attractor formation of gradual process
1.3 李雅普诺夫指数与分形维数

2 平衡点及其稳定性

定理1 (Routh-Hurwitz定理)特征方程:λI-A=λn+a1λn-1+....+an-1λ+an=0, 其中I∈Rn×n单位矩阵,A为的实矩阵,若系数满足Δi>0(i=1,2,...,n):
那么特征方程的所有特征值都具有负实部。
命题1 当参数满足a=6,c=-4时,系统 (1) 的平衡点O(0,0,0)是不稳定的。
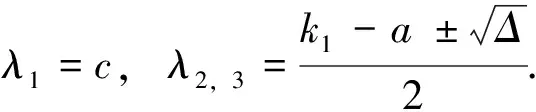
证明系统(1) 在平衡点O(0,0,0) 的Jacobi矩阵为
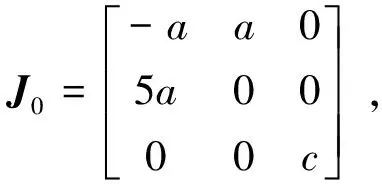

(2)
k1=4, (x,y,z)=(3,-4,2)。 图 3(a-c)为被控系统的动力学行为,控制器也可取其它函数等[6]。
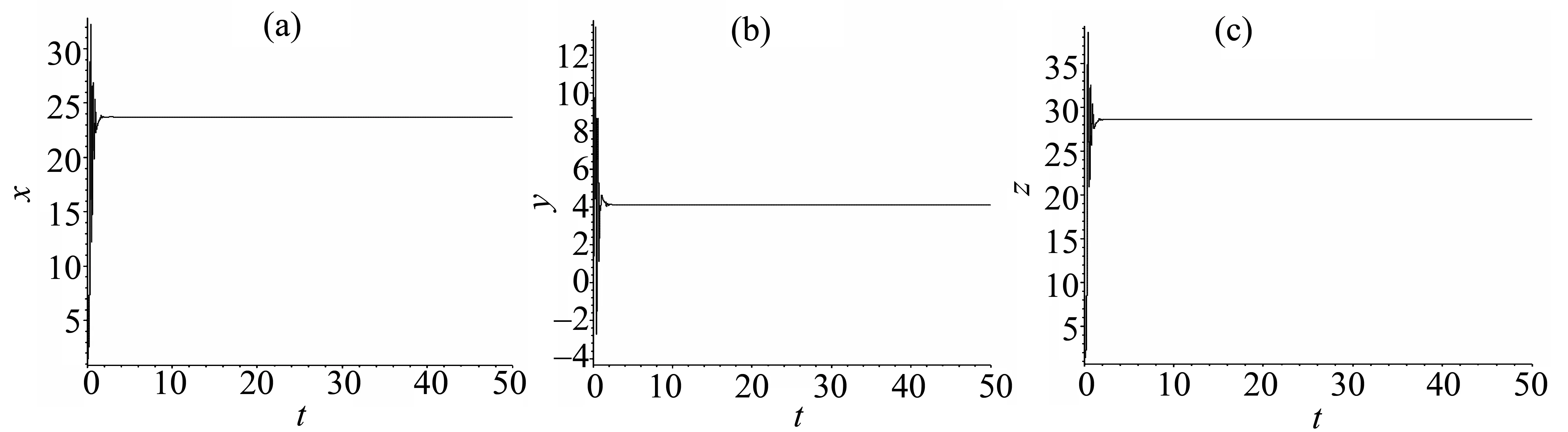
图3 (a) (x, t) 轨迹;(b) (y, t) 轨迹; (c) (z, t) 轨迹Fig.3 (a) (x, t) orbit;(b)(y, t) orbit; (c) (z, t) orbit
3 系统模型(1)的广义控制

定理2 若定义1中g(y)满足Lipschitz连续条件,控制器被设计
u=M-1f(x)-M-1(A-α)e-
(3)
而α=diag(α1,α2......αn),且满足min(αi)>(LB+A),则(1)和(2)广义同步控制。
证明误差系统:e(t)=x-My。 由定义1和(3)式知
(A+LB-min(αi))e2
(4)
由于复杂系统对初值的敏感性, 即使结构相同的2个复杂系统, 因初值不同, 运动轨迹也会产生很大的差别。以下设计并实现同步控制。系统(1)写成如下:
(5)
假设系统(5)为驱动系统,构造响应系统
(6)
u1,u2,u3为所要设计的控制器。令e1=x1+α1x2,e2=y1+α2y2,e3=z1+α3z2,得到误差
(7)
根据(3)式设计如下控制器函数
将式(8)代入系统(7),原误差系统简化为
(9)

由图4知, (a),(b),(c) 展示了ei(i=1,2,3)的变化规律。图5为同步曲线。
图6分别是系统模型同步吸引子与相图。由图5-6可知,在极短的时间内实现了复杂系统的广义同步控制,达到系统变量快速跟踪。
图4 误差状态:(a) e1=x1+α1x2;(b) e2=y1+α2y2; (c)e3=z1+α3z2Fig.4 The error states: (a)e1=x1+α1x2; (b) e2=y1+α2y2(c)e3=z1+α3z2

图5 跟踪状态:(a) 红x1与 蓝α1x2(b) 红y1与 蓝α2y2; (c) 红z1与 蓝α3z2Fig.5 Tracking states: (a) the redx1and the blue α1x2;(b)the redy1 and the blue α2y2; (c) the redz1 and the blue α3z2

图6 混沌吸引子和相图(红驱动系统,蓝响应系统)(a)(x,y,z)空间,(b) x-y平面; (c) x-z平面; (d) y-z平面Fig.6 Chaotic attractor and phase figure (the red is the drive, the blue is the response)(a) (x,y,z)space; (b) (x,y) phase; (c) (x,z) phase; (d) (y,z) phase
4 结 语
本文将数值计算、稳定性分析及非线性控制三者相结合,分析了一类复杂系统的动力特性。基于稳定性和控制理论,给出一类新控制器,实现了该模型的全局控制,而且实现同步的时间比较短,是实现系统模型控制的有效方法。
参考文献:
[1] 王光瑞,于熙龄,陈式刚.混沌的控制、同步与利用[M]. 北京:国防工业出版社, 2001.
[2] 关新平等.混沌控制及其在保密通信中的应用[M]. 北京:国防工业出版社, 2002.
[3] 陈红兵.一类具有收获率互惠系统的稳定性及Hopf分岔[J]. 中山大学学报:自然科学版, 2013,52(1):45-50.
[4] GOPALSAMY K. Stability and oscillations in delay difernetial equations population. dynamics[M].Kluwer Academic: Dordrecht, 1992:22-33
[5] PECORA L, CARROLL T. Synchronization in chaotic systems[J].Phys Rev Lett,1990,64:821-827.
[6] LI Y, LI B. Chaos control and projective synchronization of a chaotic Chen-Lee system[J].Chinese Journal of Physics,2009,47: 297-306.
[7] XIE C, XU Y, Chaos control and synchronization of a complex chaotic system[J]. IWCFTA,2010:1:71-76.
[8] 王瑞萍.基于分数阶PD控制器的永磁同步电动机控制[J].中山大学学:自然科学版,2013,52 (3): 34-39.
[9] LI Y, CHEN Y, LI B. Adaptive control and function projective synchronization in 2D discrete-time chaotic systems[J]. Commun Theor Phys, 2009,51: 270-281.
[10] LI Y, CHEN Y, LI B.Anticipated function synchronization with unknown parameters in discrete-time chaotic systems[J]. International Journal of Modern Physics C, 2009, 20:597-608.
[11] CHENY, AN H L, LI Z B. The function cascade synchronization approach with uncertain parameters or not for hyperchaotic systems[J]. Appl Math Computer,2008,197:96-108.
[12] LI X. Function projective synchronization of two identical new hyperchaotic systems[J].Comm in theor Physics, 2007, 48:864-873.
[13] LI Y, ZHENG C L. The complex network synchronization via chaos control nodes[J]. Journal of Applied Mathematics, 2013, 63 :1-12.
