一种仿牛机械足的设计与分析
2013-04-09张澈陈浩张群
张澈,陈浩,张群
(北京航空航天大学 机械工程与自动化学院,北京 100191)
0 引言
机器人已经广泛应用于生产、生活中的各个领域,传统的移动机器人可分为轮式机器人与腿式机器人。腿式机器人相对于轮式机器人,能够采用不同步态及与地面不同接触方式,具有很好的避障越障能力,可适应于复杂地貌环境下行走。其中,腿式机器人与地面的不同接触方式通过不同的机械足来实现。传统机械足一般为简单平面足[1]、曲面足[2],并辅以弹簧等减震装置。此类机械足结构与功能简单,适合在刚性平整地面上行走,但在复杂路面上行走效果较差,如传统机械足在泥地、软土地行走时,会产生下陷过深、支撑点打滑、推动力不足、出足困难等现象。
目前国内外对具有特殊地貌适应性的机械足研究甚少,不能满足步行机器人的实际应用需求,需要进一步发掘研究。因此,本文考虑到四足机器人在泥地、软土地等地面行走的问题,以牛为生物原型,研制了一种用于四足机器人的仿牛机械足,并进行了有仿真分析验证。
1 四足机器人结构组成
为了使四足机器人实现行走、爬坡、转弯等功能,在机械结构上模仿自然界较为常见的大型哺乳动物,如骆驼,水牛等。这些动物在行走时的机构模型可简化为一个具有12 个自由度(其中6 个独立自由度)的并联机构,如图1 所示。
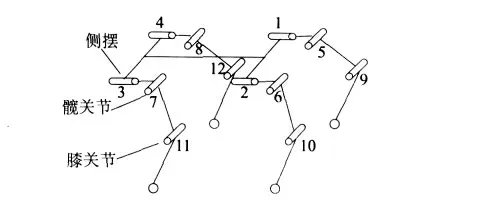
图1 四足机器人机构示意图
12 个自由度均摊在四条腿中,每条腿3 个自由度,其中胯关节两个自由度,包括外摆自由度和弯曲自由度;膝关节包含一个弯曲自由度。用Solidworks 绘制了四足机器人的样机模型示意图,如图2 所示。该机器人包括车身与四条腿,每条腿包括胯关节、大腿、膝关节、小腿和足,可模拟骆驼等动物的步态进行行走,足与小腿固连,在与机器人行走过程中支撑机器人并提供机器人前进的反力。
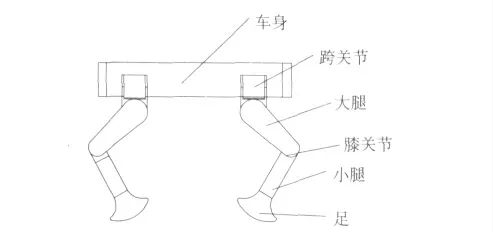
图2 四足机器人样机模型示意图
2 仿牛足的设计与分析
2.1 牛足外形特征分析
松软地面承载能力差,抗剪强度低,行走机构的性能取决于对土壤的摩擦力,外附力,常常出现下陷过深与打滑,需要控制其下土壤的流动。黄牛经常行走在松软土壤上,在与土壤的长期相互作用中,黄牛的足蹄经过不断的进化,逐步形成了优良的几何形状,使其在松软土壤上具有通过能力强、运动阻力小和行动效率高等特点[3]。
从构造上牛蹄可分为主蹄、悬蹄、十字韧带等结构[4]。主蹄前端略尖,斜向前方,后端略大,呈椭圆形,前后端之间有斜向内凹,可限制土壤流动,主蹄的几何形态与参数见图3。

图3 主蹄的几何形态与参数
2.2 牛足功能特性分析
牛蹄在行走过程中,蹄尖着地,蹄掌整体垂直入土,阻力小;入土后,蹄掌分开,泥土会嵌入到蹄瓣夹缝中,增大了接触面积,降低了接地压力,具有更大的附着力。牛蹄的运动分为两个时期。
负重期:牛蹄着地时,蹄尖率先着地,然后蹄跟着地,蹄掌垂直入土,在土壤支撑力的作用下两个蹄瓣张开,土壤进入蹄瓣间的缝隙,增大了蹄掌的摩擦力和对土壤的附着力。蹄瓣间的十字韧带可使蹄瓣的张开有一点限度,并使蹄瓣内侧凹面夹紧其间土壤,防止土壤流动,起到固土作用。
离地期:牛蹄抬起的过程中,牛蹄以一定角度从地面离开,由于其外形特征,出土阻力很小。随着地面对蹄掌的支承力减小,蹄瓣所受的张力也随之减小,在十字韧带的作用下,蹄瓣间夹角消失,恢复蹄掌的原始状态。
由此可见,牛蹄在软土地行走时具有蹄尖着地,垂直入土,蹄瓣张开,蹄瓣固土,出土恢复等功能,所以仿牛机械足除在形态结构上需与牛足相似外,还需具有上述特殊功能。
2.3 仿牛机械足的Solidworks 建模
对仿牛机械足进行了Solidworks 建模。由于四足机器人要适应不同的地貌行走,应具备不同种类的机械仿生足,所以设计了不同机械足间的快速更换机械接口。在行走过程在希望脚掌以固定姿态接触地面,不依赖于步态,设计了欠驱动的踝关节,可使脚掌相对小腿在平面内自由转动。整个机械足包括机械接口、踝关节、脚掌三部分,如图4 所示。

图4 机械仿生足三视图
机械接口的接口外壳与小腿固连,内壳与踝关节固连并通过插销固定在接口外壳内部。机器人更换机械足时,只需向上拔出插销,退出接口内壳,装上新足的内壳接口,插入插销即可。
踝关节上关节与机械接口固连,支承座与脚掌固连。踝关节可以使脚掌相对小腿两自由度转动(绕长轴与短轴),使脚掌在重力作用下始终以相同姿态接触土地。
脚掌固定在支承座上,在外力作用下主蹄的两个蹄瓣可绕蹄轴向外转动,同时受到柔性铰链的阻力。柔性铰链一端与蹄轴中间凹槽平面通过螺钉连接,另一端与主蹄瓣外侧竖直凸台接触。脚掌结构与外形模拟牛足,同时可模拟牛足行走的特征。
参照牛足的行走特点,仿牛机械足装置具有以下功能:
1)仿牛足在悬空时前端略向下倾斜,足尖先接触地面,在支持力作用下脚掌迅速变为水平。
2)当仿牛足完全接地后载荷增大,土壤的支持力作用在主蹄内侧主受力斜面上,产生水平分力矩使主蹄张开,土壤嵌入蹄瓣间增大了摩擦力。
3)蹄瓣张角增大到一定角度时(20°左右),柔性铰链变形产生的制动力矩使蹄瓣停止转动,蹄瓣在制动力矩作用下夹紧中间的土壤,限制了土壤的流动,产生固土效果。
4)当仿牛足离地时,主蹄瓣从土壤中抽出,同时主受力斜面受力减小,蹄瓣姿态复原。
5)仿牛足具有快速更换功能。
2.4 仿牛足关键零件分析
2.4.1 主蹄分析
在仿牛蹄行走过程中,主蹄瓣是支撑机器人的主要零件,并提供机器人行走的前进推动力。主蹄瓣的外形模拟牛足主蹄外形,前端略尖,后端略宽,呈椭圆形,形状适合出土。主蹄可沿蹄轴向外侧转动,蹄瓣内侧有凹面,即主受力斜面,斜面与水平呈45°,负责承受与土壤的接触力。蹄瓣外侧开有凹槽,凹槽的竖直面与柔性铰链接触。考虑仿牛足的载荷与真实牛体重的差距,蹄瓣尺寸做了适当缩小。
主蹄的材料为防滑橡胶,橡胶的主要优点在于防滑和减震。利用Solidworks 质量属性与剖面属性分析工具分析得,每个主蹄瓣的质量为34 g,质心距踝关节短轴的垂直距离为17 mm,主受力斜面形心距蹄轴垂直距离28 mm。
2.4.2 悬蹄分析
牛是典型的偶蹄兽,两个悬蹄位于脚掌后方,呈锥形,在长期演变过程中逐渐退化,在行走中只起辅助作用。在仿牛机械足中,悬蹄置于脚掌后方,上端带螺纹圆柱与支承座后端通孔配合,下端为长方体并带有锥形头,采用金属材料。悬蹄的主要作用为:
1)在足悬空期其配重作用,由于支承座质量分布较为对称,蹄轴与柔性铰链质量较小,悬蹄便用于平衡主蹄瓣重力对踝关节短轴的力矩,使脚掌保持前端略低的姿态。由Solidworks 质量属性工具测得,每个悬蹄质量为27 g质心距离踝关节短轴垂直距离19 mm。则脚掌水平时悬蹄重力产生的旋转力矩为:

略小于主蹄重力产生的旋转力矩:

符合设计要求。
2)在脚掌入土后防止脚掌翻转。由于主蹄集中在脚掌前部,在接触地面过程中受到地面支持力易向上翻转,悬蹄入土可提供防止主蹄翻转的制动力矩,起到防止翻转的作用。
3)在脚掌入土后防止脚掌打滑。主蹄在土中受到土壤前进方向的摩擦力,容易产生打滑现象,悬蹄入土后,可提供部分机器人向前的推力,防止主蹄打滑。
2.4.3 柔性铰链分析
在现代仿生机械设计中,柔性零件被越来越多地用来模拟生物中肌肉,韧带等有机结构。本文中的柔性铰链用来模拟牛足脚掌的十字韧带,在主蹄瓣外摆过程中提供阻力。柔性铰链尺寸如图5 所示。
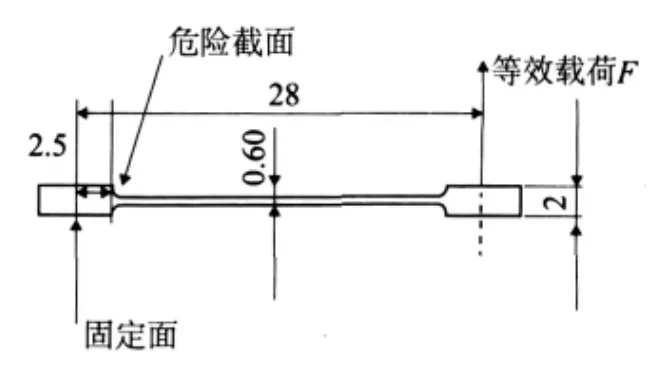
图5 柔性铰链示意图
由图可知,在着地过程中,柔性铰链所受主蹄瓣等效载荷距固定点,即蹄轴中心距离28 mm,受力面厚度2 mm,中间柔性部分设计为0.6 mm,可保证良好柔性[5]。由示意图可知,柔性铰链受力相当于悬臂梁一端受压的情况,危险截面如图所示,可由等效载荷确定柔性铰链最小宽度。
为计算柔性铰链的等效载荷,每个机械足承受最大载荷20 kg,假设支持力全部由主受力斜面提供,斜面承受土壤的正压力与摩擦力,如图6 所示。
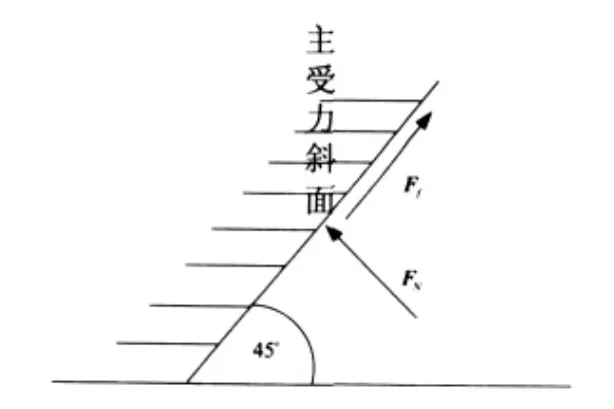
图6 主受力斜面受力示意图
假设主受力斜面所受正压力与摩擦力为均布力,其等效载荷作用在斜面形心上,主蹄与土壤的滑动摩擦系数为0.5[6],由图可知:

可得:FN=94.3 N,设主蹄瓣受到的水平推力为F1,则:
由于斜面形心到蹄轴的的垂直距离与柔性铰链等效载荷到固定面中心,即蹄轴的距离同为28 mm,当主蹄瓣所受土壤主动力矩与柔性铰链制动力矩相等时有:

由悬臂梁受力公式可知:
式中:[σ]—材料屈服极限,柔性铰链材料选用50 CrVA 合金钢,屈服极限为1 127 MPa,弹性模量196 GPa,泊松比0.3;
σ—危险截面最大应力;
M—危险截面所受转矩;
W—危险截面截面系数;
F—柔性铰链所受等效载荷;
l—等效载荷到危险截面力臂;
b—柔性部分宽度;
h—柔性部分厚度。
带入可得:b >12.56 mm,取柔性铰链宽度为14 mm。
利用Solidworks 有限元仿真模块对设计完成的柔性铰链进行校核,添加好固定面的夹具,在受力面施加均布载荷,设定材料的屈服极限、弹性模量、泊松比等参数,默认系统的标准化网格划分,运行算例,得到柔性铰链的应力及位移分布如图7、图8 所示。
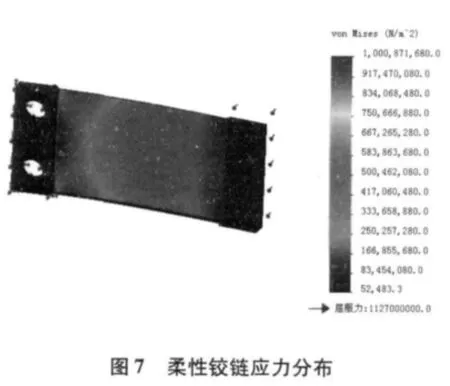
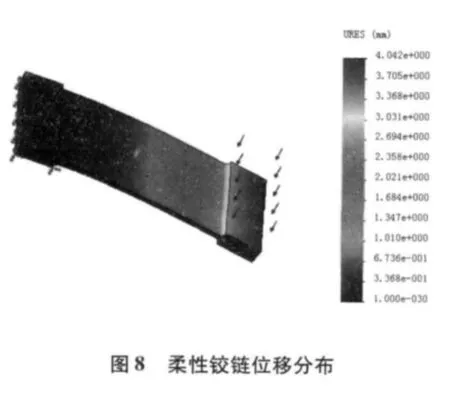
由应力分布图可知,危险截面最大应力为1 000 MPa,小于材料屈服极限1 127 MPa,符合强度要求。由位移分布图可知,柔性铰链受力面最大位移为4.04 mm,柔性部分末端位移3.03 mm,由几何关系可得,受力面相对于固定面的转角为:

即主蹄瓣最大转角11.65°,两蹄瓣夹角23.3°,接近20°,满足设计要求。
3 结论
满足四足机器人在泥地或软土地面行走的实际应用需求,本文通过对牛足的结构仿生研究,设计研制了一种仿牛机械足装置。类比牛足的形态与运动特点设计了仿牛机械足结构,并用三维软件进行了建模,分析及仿真表明所设计的机械足可以较好地模拟牛足在上述地面行走的特点,同时保证零件的结构安全。
[1]Ding,X.,et al.Wheel/leg robot for public safety protection identification & detection[J].2008:IEEE.
[2]Fukuoka,Y.,et al.Adaptive dynamic walking of a quadruped robot 'Tekken'on irregular terrain using a neural system model.in Robotics and Automation[C],2003.Proceedings.ICRA '03.IEEE International Conference on.2003.
[3]陈勇.黄牛在松软地面行走运动及仿生应用[D].吉林:吉林大学,2008.
[4]袁凤林,华慧敏,田玉平.牛蹄解剖构造功能的研究[J].宁夏农学院学报,2003,(3).
[5]李秀梅.双足机器人仿生足部运动研究[D].杭州:杭州电子科技大学,2010,11.
[6]庄继德.计算汽车地面力学[M].北京:机械工业出版社,2002.
