椰果采摘机液压系统的改造
2013-03-31王伟
王伟
(武汉船舶职业技术学院机械工程系,湖北武汉430050)
1 椰果采摘机结构及液压系统
为配合“海南省百万亩椰林工程”规划而由海南某大学设计的椰果采摘机结构及液压系统如图1、2所示。

图1 椰果采摘机结构原理图
其工作过程如下:该机由拖拉机拉到指定位置后,通过柴油机带动液压泵工作;然后通过手动换向阀控制4个液压支腿先伸出来,将整台机顶起;再控制大臂回转、变幅缸动作,让大臂回转、变幅;接着通过伸缩缸让大臂逐级伸出,达到相应高度后,最后通过液压马达使旋转臂旋转和割刀旋转,完成切割椰果果穗的动作。
它解决了传统的人工爬树采摘方式效率低、劳动强度大、安全性差的缺点,但作者在研制过程中发现该液压系统还存在较大缺陷,于是作了如图3所示的技术改进。
2 椰果采摘机液压系统改进
(1)改进设计一
原设计方案大臂伸缩、变幅、回转无调速,这样无法较精确定位并有安全隐患,故在改进设计图3中增设调速阀6来调速。
(2)改进设计二
原设计方案大臂伸缩、变幅、回转以及前臂、割刀的回转可同时操作,从提高工作效率角度来看是有利的,但极大地增加了操作员的工作强度,更可怕的是万一操作员手忙脚乱碰到了不该操作的手柄极易引发安全事故。故在改进设计图3中用二位三通钢球定位式手动换向阀5将大臂伸缩、变幅、回转的油路与前臂、割刀的回转油路并联起来,并且互锁 (即大臂伸缩、变幅、回转动作与前臂、割刀的回转动作不能同时进行)。
(3)改进设计三
原设计方案控制割刀旋转完成切割椰果果穗的动作采用了弹簧复位式手动换向阀18来控制,也就是说在切割椰果果穗时,操作者一只手必须始终按住手动换向阀18的操作手柄不放,另一只手去操作换向阀17的操作手柄来完成切割椰果果穗动作。这样对操作者双手的协调性要求较高、难度较大,劳动强度也大。故在改进设计图3中用钢球定位式手动换向阀18来替换掉弹簧复位式手动换向阀。
(4)改进设计四
液压马达有2个主油路油口和1个泄漏油口。泄漏油回油箱管路为细油管,在回路中一般不表示,要表示也应用虚线表示,而原设计方案中用粗实线,表示用主油路中的粗油管来引泄漏油回油箱,故在改进设计图3中干脆按绘图要求不画。
(5)改进设计五
由于有了前面的改进设计一、二和三,故原设计方案图2中的二位三通钢球定位式手动换向阀3已不适用。改用图3中的三位四通M型机能的电磁换向阀3:当电磁铁都不通电时,泵卸荷;9DT通电时,支腿液压缸运动;10DT通电时,可大臂回转、变幅缸动作或使旋转臂旋转和割刀旋转,完成切割椰果。
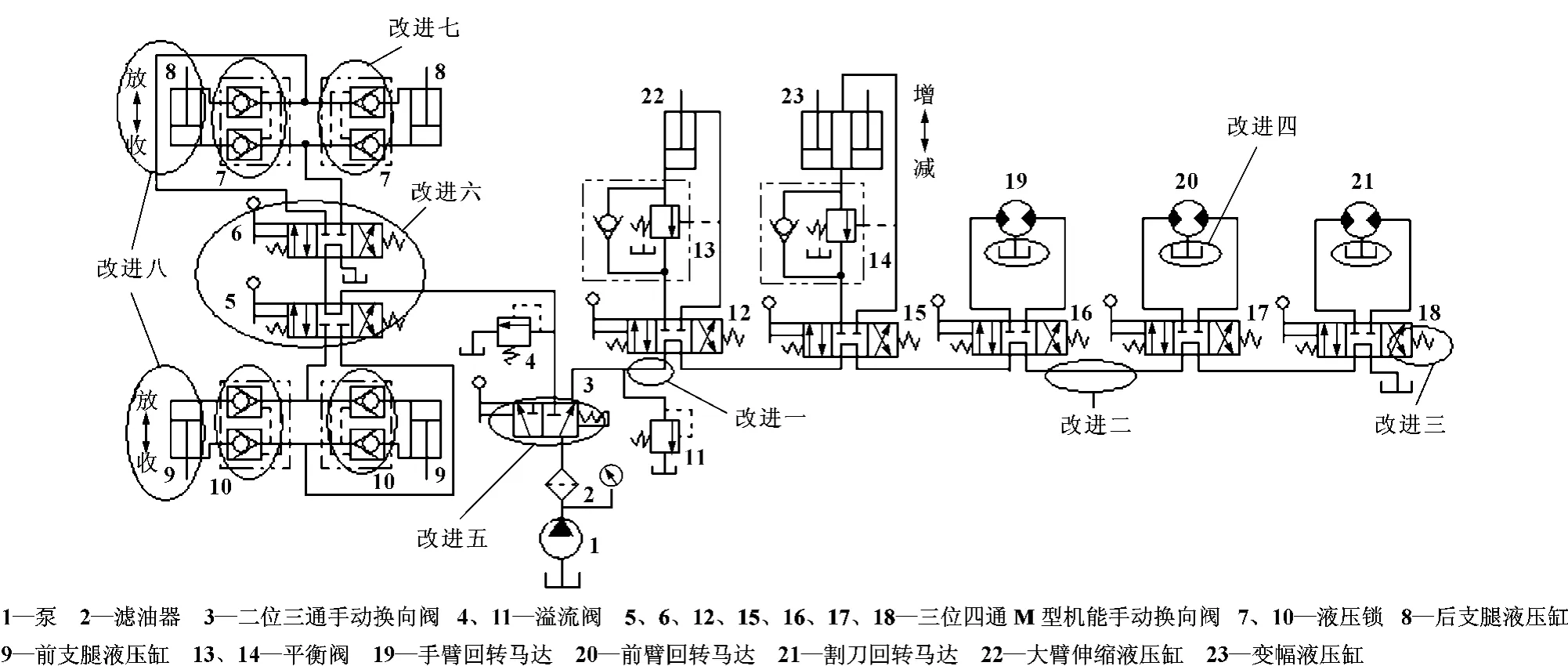
图2 原椰果采摘机液压系统图

图3 改进后的液压系统图
(6)改进设计六
由于支腿采用液压锁锁紧,故相应的换向阀机能应采用Y型,以便让液压锁与换向阀间管路中的油液尽快流回油箱,使液压锁立即锁紧。故换下图2中的M型,改用图3中的Y型,并改用电磁换向阀,以便采用单片机自动控制。
(7)改进设计七
支腿没必要双向锁紧,故改用图3中的液控单向阀单向锁紧。
(8)改进设计八
原设计前后腿动作不一致:后腿液压缸活塞杆伸出为支腿放下,前腿液压缸活塞杆收回为支腿放下。改进设计图3中全调整为活塞杆伸出为支腿放下。
(9)改进设计九
液压支腿采用先进的智能调平系统。
智能调平系统硬件组成如图4所示,主要组成部分有:双轴倾角传感器、单片机、控制电路、键盘显示板以及控制支腿行程的液压系统等。

图4 系统硬件组成
文中选择位置误差调平法中的“最高点不动”调平法。平台经过预支撑后,一般是不水平的,在有倾角的情况下,平台肯定会有一个最高点,在调平时保持最高点不动,其他支撑点向上运动与之对齐,当各点达到最高点位置时平台即处于水平状态。这种只升不降调平方法可以避免由于平台自重和负载过大,在下降过程中产生较大的惯性力,而使平台出现剧烈抖动,以致无法调平的现象。

图5 调平平台示意图
“最高点”调平法的具体实现方法是:根据倾角传感器的信号,确定平台的最高点,并将信号送给控制装置(单片机),控制装置通过调平程序驱动各支腿液压缸,使较低的支腿上升,从而使各点处于同一个高度,平台达到水平状态。调平平台示意图如图5所示。
图5中水平面坐标系为Ox0y0z0,与椰果采摘机平台固联的平台坐标系为Ox1y1z1。α、β角为双轴倾角传感器所测得的俯仰角与横滚角。最高点的确定是:当α>0、β>0时,3点为最高点;当α>0、β<0时,4点为最高点;当α<0、β>0时,2点为最高点;当α<0、β<0时,1点为最高点。当α=0、β= 0时,平台达到水平状态。
液压支腿智能调平系统调平控制流程图如图6所示。
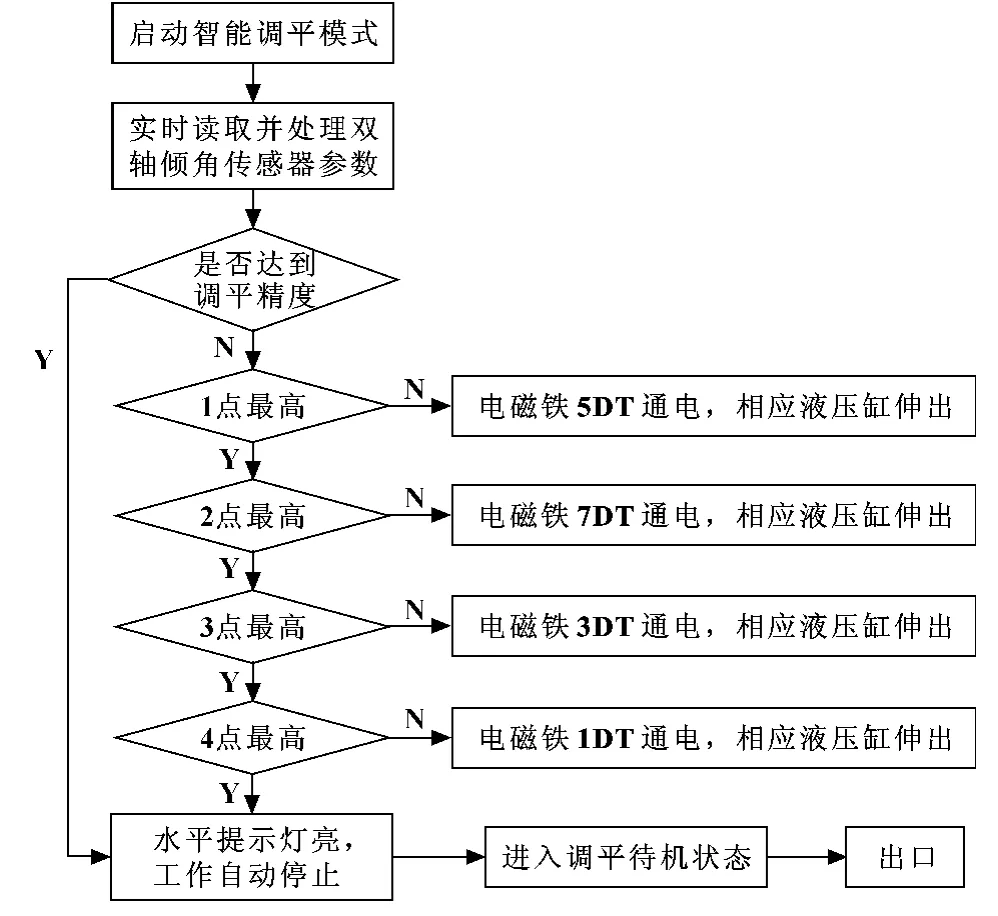
图6 调平系统调平控制流程图
3 结束语
机械化椰果采收模式的出现,能解决传统的人工爬树采摘方式危险性大、采摘质量差及工效低的问题,必然会更加有力地推动“百万亩椰林工程”的建设,促进椰子产业化、商品化的发展。
新系统较原系统在许多方面作了改进,更合理,操作更轻松,特别是液压支腿智能调平系统将机电技术、液压传动与控制技术结合在一起,实现了平台的快速而精准的调平功能,提高了调平精度,缩短了调平的时间,扩大了智能调平系统的适用范围,具有很大的应用价值。
【1】梁栋,张劲.椰果采摘机液压系统设计[J].液压与气动,2010(5):27-28.
【2】张芳.高精度平台调平控制系统研究[D].太原:中北大学机电工程学院,2008.
【3】倪江生,翟羽健.六点支承静基座液压平台的调平方法[J].东南大学学报,1996,26(2):74-79.
