有源电力滤波器直流侧电压新的控制策略
2013-03-28周凯杰曹培培
周凯杰,曹培培
(淮阴师范学院物理与电子电气工程学院,江苏淮安 223300)
0 引言
近年来由于电力电子等非线性设备的大规模使用,在电网中产生了大量的谐波,致使电网污染日益严重,并对人们的日常生产和生活造成了极大的危害,因此采取必要的措施来抑制谐波、提高电能质量已刻不容缓.而有源电力滤波器(APF)是公认的治理谐波污染的有效手段之一,对其进行研究具有非常重要的实际意义.有源电力滤波器(APF)是一种新型主动抑制谐波和补偿无功的电力电子补偿装置,具有较好的动态性能,可以弥补传统无源滤波器补偿方法的不足.有源电力滤波器的原理是产生与谐波源谐波电流幅值相同、相位相反的补偿电流,从而达到滤除谐波的目的.有源电力滤波器主要包括两大部分[1]:指令电流运算电路和补偿电流发生电路.其中补偿电流发生电路由电流跟踪控制电路、驱动电路、主电路(PWM变流器)三大部分组成.目前主电路主要采取电压型、电流型逆变器两种形式,目前电压型应用最为广泛.而电压型逆变器直流侧电压是否保持稳定直接关系到补偿电流的跟踪性能,因此对直流侧电压进行控制,保持其稳定就很有必要了.传统PI控制因其原理简单,易于实现,控制参数相互独立等优点被广泛应用在APF直流侧电压控制上.但是由于PI控制过于依赖系统的精确的数学模型,鲁棒性差,容易引起电流冲击和电压超调,导致系统过流和过压保护动作,严重时会导致IGBT等器件的损坏[2].模糊控制的鲁棒性强,对非线性、时变及纯滞后的系统尤为适合.模糊控制直接采用语言控制规则,在设计中不依赖被控对象的数学模型,设计简单,便于应用.
本文针对传统PI控制策略的不足,设计了基于模糊控制的PI控制器.该策略以实际电压与给定电压的差值及其变化率为输入量建立模糊控制规则,使PI参数根据要求进行自动调节,并通过建立APF仿真模型进行验证.
1 SAPF工作原理
并联型有源电力滤波器(SAPF)原理图如图1所示,工作原理是通过电压传感器、电流传感器检测出相应的电压和电流信号,然后通过指令运算单元计算出补偿的指令电流ic*,经有源滤波器的控制器进行信号处理将其转换成PWM指令,控制PWM变流器输出与谐波电流大小相等、相位相反的补偿电流ic,从而达到消除谐波,得到理想的正弦电流.APF作为一种用于动态抑制谐波、补偿无功的新型电力电子装置,它能对频率和幅值都变化的谐波以及无功进行实时补偿.

图1 并联型有源电力滤波器原理图
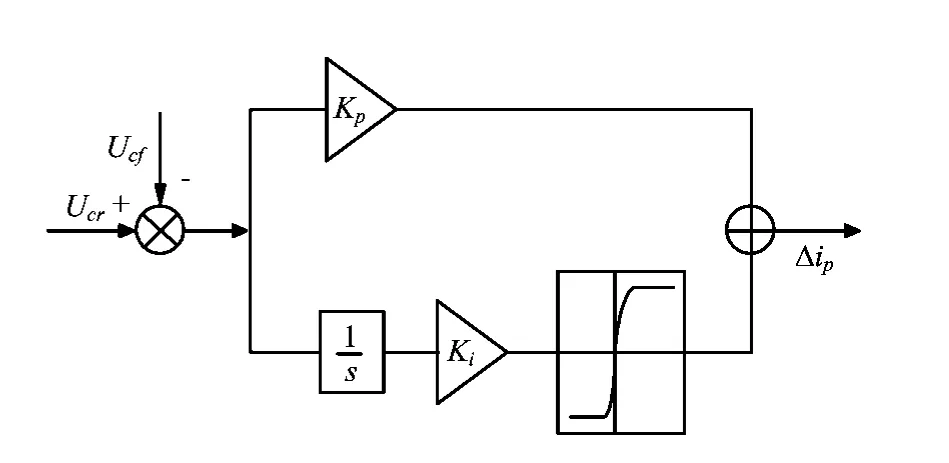
图2 PI控制原理图
2 直流侧电压PI控制方法
在APF试验中,发现直流侧电压的波动对补偿效果影响非常显著[3].为保持直流侧电容电压保持稳定,目前往往采取PI控制方法对其进行控制,其具体做法如图2所示.Ucr是直流侧电压的基准值,Ucf是实际电压测量值,将两者之间的差值送入PI控制器,经PI控制器调节后得到调节信号ip,将该信号叠加到瞬时有功电流的直流分量上,然后通过指令运算单元得到相应的指令电流ic*,使得补偿电流ic中包含某些基波有功电流分量,从而实现有源电力滤波器交流侧和直流侧的能量交换,控制实际电压Ucf趋于基准值.

图3 PI控制直流侧电压补偿后A相电流图
在直流侧电压采取PI控制方法下,经过APF补偿后A相电网电流波形如图3所示,可见波形有很多毛刺,尤其在负载电流突变的时候存在许多尖峰,这些毛刺和尖峰主要由系统延时和电压波动所致.在SAPF中,直流侧电容用于为主电路提供稳定的直流电压.瞬时有功功率关系如图4所示,Ps、Pl分别为电源侧、负载侧传输的有功功率,Pc则是SAPF传输的有功功率,根据图中所标电流和功率流向,可知Ps=Pl-Pc,同理,平均值之间同样满足Ps*=Pl*-Pc*,根据瞬时功率守恒原则[4],不考虑SAPF损耗,可得:

式(1)中Udc为主电路直流侧电容两端电压,因为为一个开关周期内直流侧电容电压变化值的平方差,即:

将式(2)代入Ps*=Pl*-Pc*可得:

设Us、Is为系统相电压、相电流的幅值,则电源平均功率为P*s=UsIs/2,则有:

从式(4)、(5)表明,Is与存在线性关系,由此可知,直流侧电压的波动必然会导致系统电流的变化,给电网注入谐波,从而影响APF谐波补偿的性能,所以直流侧电压控制选择一个好的控制策略,能较好的改善APF的滤波效果.
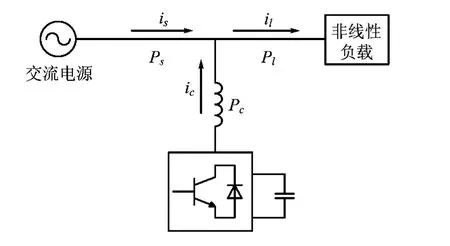
图4 SAPF能量关系图
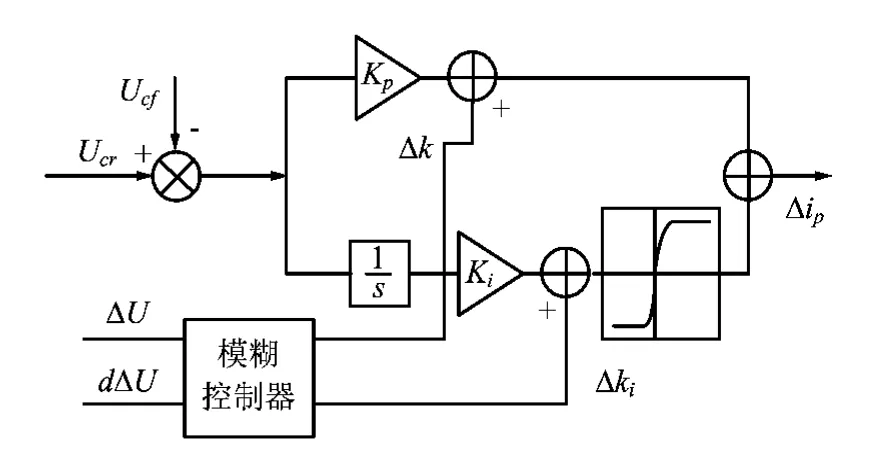
图5 模糊PI控制原理图
3 直流侧电压模糊PI控制器的设计
3.1 模糊PI控制器的原理
模糊PI控制原理如图5所示,其中U是直流侧电压实际测量值与基准值的差值,dU是差值的变化量.模糊PI控制器在传统PI控制的基础上,应用模糊推理理论建立U、dU与PI参数Kp、Ki之间的函数关系,并根据直流侧电压U、dU的实际变化情况调节参数Kp、Ki,从而解决控制参数难以选择的问题以及使被控对象获得更好的稳、暂态性能.
3.2 模糊PI控制器的设计
本文设计的模糊控制器,采用两输入两输出系统.模糊控制器的两个输入分别为U、dU,两个输出量分别为Kp、Ki的修正值Kp、Ki.设定输入量、输出量的语言值集合设定为:狖NB,NS,NM,ZO,PS,PM,PB狚,分别代表负最大值、负中间值、负最小值、零值、正最小值、正中间值、正最大值.U、dU、Kp、Ki的隶属函数如图6所示.

图6 输入量与输出量隶属度
考虑到Kp、Ki这两个参数对系统输出特性存在影响[5],当偏差量|Δu|较大时,Kp、Ki应取较大,尽快消除偏差,加快系统的响应速度,这样可以使系统的时间常数和阻尼系数减小,但不得过大,否则会导致系统不稳定;当|Δu|处于中等大小时,如果Δu与dΔu方向相同时,表明被控量偏离给定值,为了使系统减小超调,应取较大的Kp,此时可适当增加Ki,但不宜过大,而当Δu与dΔu方向相反时,表明被控量接近给定值,此时可逐渐减小Kp、Ki;当|Δu|较小时,应取适中的Kp、Ki保证系统的良好稳态性能.综上所述,并考虑到偏差变化率|dΔu|的影响,制定合理的模糊规则,如表1所示:

表1 模糊控制规则
仿真环境为:电源:三相对称电源,幅值380V,频率50Hz;谐波负载:三相可控硅整流桥,触发延迟角30°,电阻50 Ω,电感280mH;直流侧电容8 800 μ F,运行电压为1000V,IGBT开关频率为10KHz,交流侧电感8 mH.设定初始参数Kp=12、Ki=0.5.模糊PI控制器仿真模型如图7所示.

图7 模糊PI仿真模型
在相同的仿真环境下,本文独立的对传统PI和模糊PI两种直流侧电压控制方法进行仿真,仿真波形如下图所示.图7是传统PI控制直流侧电压仿真波形,图8是模糊PI控制直流侧电压仿真波形.比较两个波形,可以看出模糊PI控制方法超调小,且响应时间短,比传统PI控制优越.
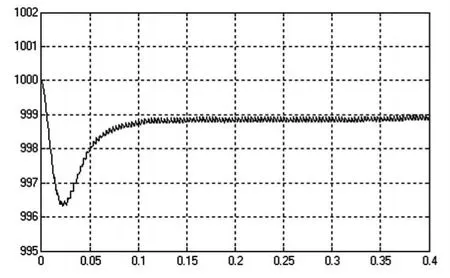
图8 传统PI控制直流侧电压仿真波形
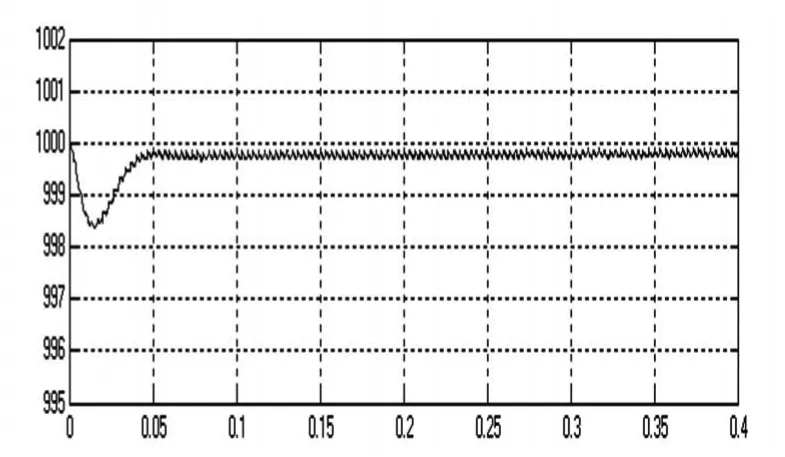
图9 模糊PI控制直流侧电压仿真波形
4 补偿效果
直流侧电压模糊PI控制与传统PI控制两种方式下,补偿后的电网电流波形及FFT频谱分析图如图10所示.使用传统PI控制方式,补偿后电网电流总畸变率为9.07%,而通过模糊PI控制方式,电网电流总畸变率下降为3.32%,电流波形更接近正弦波,谐波含量大量减少,从而改善电能质量,降低谐波对电网的污染.
5 结论
针对传统PI控制方法参数难以选择的问题,设计了一种基于模糊控制的参数自整定模糊PI控制器,并利用MATALB软件搭建Simulink仿真模型.仿真结果表明,直流侧电压模糊PI控制策略,相较于传统PI控制方法,在控制直流侧电压稳定以及补偿电流效果上都有明显的优势,具有较强的实用性.
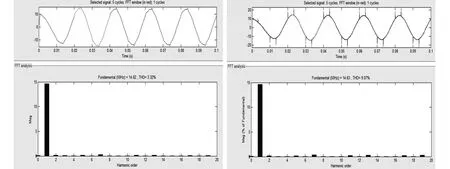
图10 补偿后电网电流频谱图
[1] 王兆安,杨君,刘进军.谐波抑制和无功功率补偿[M].北京:机械工业出版社,1998:39-82.
[2] 李智华,刘振,吕振彬.有源电力滤波器直流侧电压的模糊自适应控制[J].电源技术,2010,31(3):582-585.
[3] 周雪松,周永兵,马幼捷.一种先进的APF补偿电流自适应谐波检测法[J].电力电子技术,2008,42(4):9-11.
[4] 王大志,葛帅,李俊,等.有源电力滤波器锁相倍频电路的参数优化[J].电力电子技术,2010,44(12):14-17.
[5] 刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2007:115-128.
