模糊PID控制的车载平台高精度动态调平仿真研究
2013-03-21仕润霖冯永保李淑智郭晓松
仕润霖,冯永保,李淑智,郭晓松
(第二炮兵工程大学,陕西西安710025)
某车载设备使用前,通常要对车体平台进行调平,调平时间和精度直接影响设备效能的发挥。传统的车载平台调平多采用开关式换向阀控制,调平稳定性差、时间长、精度低,而且存在点位耦合及虚腿现象[1-2];控制方法多采用开环控制的调平方案,虽然控制流程简单,但存在调节时间长、调平稳定性差等问题[1]。作者在分析车载平台传统调平原理分析的基础上,提出了电液比例阀控液压缸的调平方案,并采用模糊PID控制算法实现平台的动态调平,通过AMESim 和MATLAB/Simulink软件的联合仿真,验证了所采用调平方案的可行性。
1 调平方案设计
1.1 调平基本原理[1,3-4]
四液压支腿支撑的车载平台经过预支撑后,一般都不是水平的,其坐标关系如图1所示。
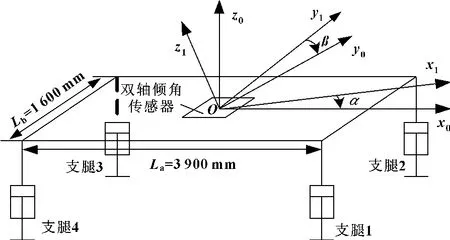
图1 车载平台在非水平状态下坐标关系
通过双轴倾角传感器检测平台x轴方向的倾角为α,y轴方向的倾角为β,设Ox0y0z0为水平面坐标系,Ox1y1z1为与车体固联的平台坐标系。支腿i 在Ox0y0z0坐标系中的坐标为0Pi=(0Pix,0Piy,0Piz)T,在Ox1y1z1坐标系中的坐标为1Pi=(1Pix,1Piy,1Piz)T。由于倾角α、β 不为0,且一般情况下较小,根据文献[1,4]知两坐标系之间的变换矩阵如下:

同样,假设坐标系Ox1y1z1中,各支腿坐标为:1Pi=(1xi,1yi,1zi)T,又因为1zi=0,所以由公式0计算可得各个支腿油缸与车体的连接处在水平面坐标系中的z坐标为:

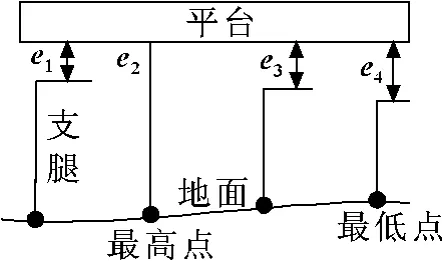
图2 平台四支腿展开图
因此通过判断z 中坐标α、β的正负可得一个最高支腿。假设i=h为最高点,则有0zh≥0zi。现根据图1假设车载平台经过预支撑后,双轴倾角传感器测得初始角α0>0、β0>0,则2为最高点,4为最低点,如图2,各支点与最高点位置差为:

1.2 调平方案
文中提出的调平方案分为两个阶段,调平过程如图3所示:第一阶段采用“最高点[1,4]”不动调平法。传统“最高点”不动调平法为保持“最高点”不动,各支腿依次伸出到达最高点,该方法调平时间较长。文中方案依然保持“最高点”不动,根据双轴倾角传感器实时检测到的倾角α、β值,由公式(3)计算各支腿到最高点的位置差,将这个位置差值作为各支腿模糊PID控制器的控制信号,并将控制信号与各支腿位移传感器获取的当前位移值比较得出误差e,模糊PID控制器根据误差e 计算出控制各支腿电液比例换向阀阀芯运动的电流值以控制各支腿上升给定的距离,使各支腿同时以不同速度伸出到同一高度,平台最终达到水平状态,由于支腿同时伸出,所以缩短了调平时间;第二阶段主要根据实际工作对车载平台离地距离的需要,控制4个支腿同步伸出,当达到要求的位置后,切断控制信号,支腿通过液压锁锁定,平台位置固定,调平结束。由以上调平过程可以看出,每个支腿都有自己的控制器,整个系统为闭环控制,反馈信号为实时检测到的倾角α、β值和支腿位移值,由于整个调平过程是动态的,所以在调平过程中可以消除传统调平方案中出现的点位耦合及虚腿现象,系统整体性能较好。
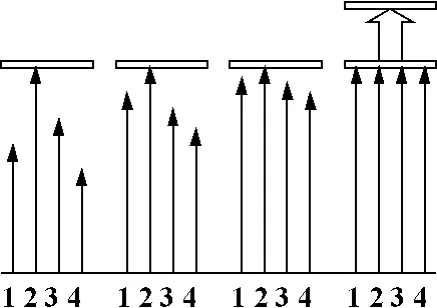
图3 调平过程示意图
2 调平系统液压回路的AMESim 建模
车载平台调平系统液压回路的AMESim仿真模型如图4所示。液压系统采用定量泵和安全阀组成恒压供油单元,电液比例换向阀调节流入液压缸的油量,双向液压锁使支腿锁紧,防止平台因重力作用下滑,位移传感器获取支腿当前位移值。
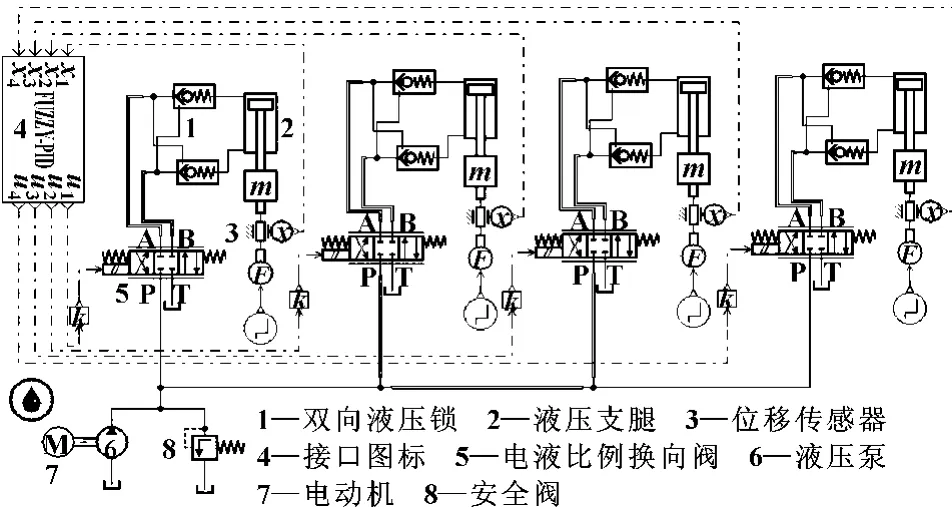
图4 调平系统液压回路AMESim仿真模型
作者采用AMESim 和MATLAB/Simulink 联合仿真,在AMESim 和Simulink 均能够正常运行情况下,正确设置联合仿真接口[5],并在AMESim 中通过Interface 界面菜单创建能与Simulink 实现连接的接口图标4。设定平台液压系统模型主要参数为:液压泵排量25 mL/r;电机转速1 460 r/min;支腿油缸行程600 mm、活塞直径90 mm、活塞杆直径63 mm;安全阀开启压力6 MPa;电液比例换向阀(1 MPa 压降)流量50 L/min、额定电流560 mA、固有频率3 Hz;单向阀开启压力0.3 MPa;m=1 000 kg。
3 模糊PID控制器设计[6-7]
模糊PID控制是一种将模糊控制与常规PID控制有机结合的控制技术,其算法结构如图5所示,模糊控制器的输入是误差e 和误差变化率ec,输出是ΔKP、ΔKI和ΔKD。PID参数模糊自整定是找出ΔKP、ΔKI、ΔKD和误差e 及误差变化率ec之间的模糊关系,在运行中通过不断检测e 和ec,根据模糊推理的方法实现PID参数的在线自整定,满足不同e 和ec 对控制参数的不同要求,以达到控制目的。该控制系统不仅保持了常规PID控制系统原理简单、使用方便、鲁棒性较强、控制精度高等优点,而且具有模糊控制的灵活性、适应性强等优点。
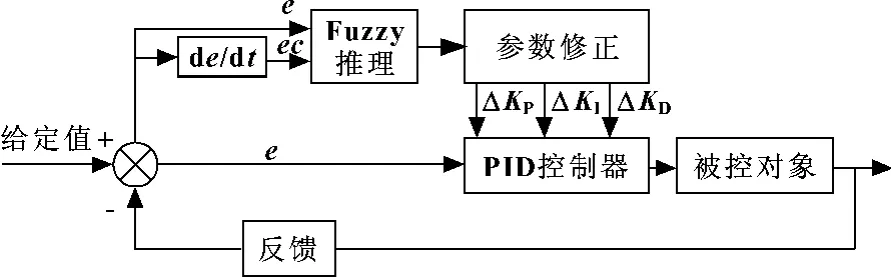
图5 模糊PID控制算法结构图
模糊控制器的输入、输出语言变量e、ec、ΔKP、ΔKI、ΔKD的模糊论域均为[-1,1],模糊子集为[NB,NM,NS,ZO,PS,PM,PB],考虑到对论域的覆盖程度和灵敏度、稳定性与鲁棒性原则,各模糊子集采用三角形隶属函数,输出量的逆模糊化采用重心法,ΔKP、ΔKI和ΔKD的控制规则见表1。
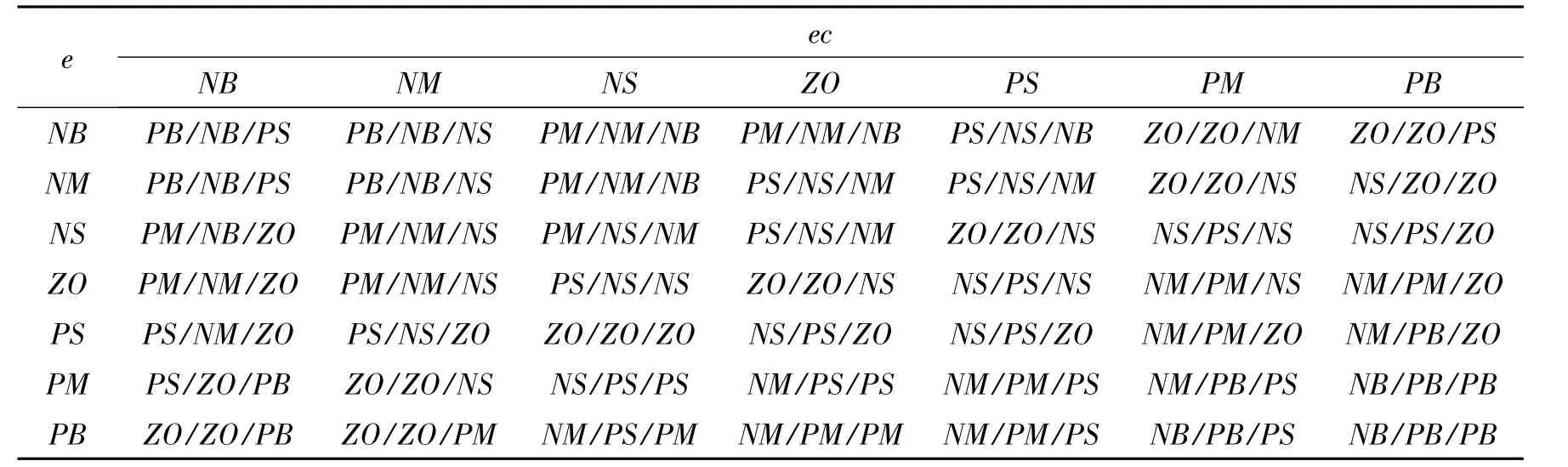
表1 ΔKP、ΔKI、ΔKD的模糊规则表
4 系统联合仿真分析
4.1 模糊PID控制器的MATLAB/Simulink模型
按照图5所示的结构框图搭建模糊调整PID控制器参数仿真模型如图6所示,并在MATLAB 命令窗口中键入fuzzy 进入FIS editor 界面,根据模糊控制器的结构、控制规则和逆模糊化方法,完成模糊控制器FIS文件编辑。
4.2 Simulink 环境下的仿真模型
利用Simulink 提供的S-Function模块建立与AMESim 进行数据交换的接口,在S-Function模块参数设置对话框中设置S函数名为“zhitui_”,然后将相应模块连接好,搭建系统仿真模型如图7所示,Fuzzy Logic PID Controller 1~4的内部结构见图6。
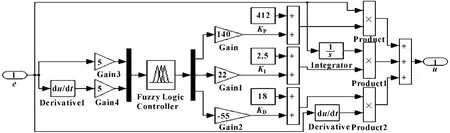
图6 模糊调整PID控制器参数仿真模型
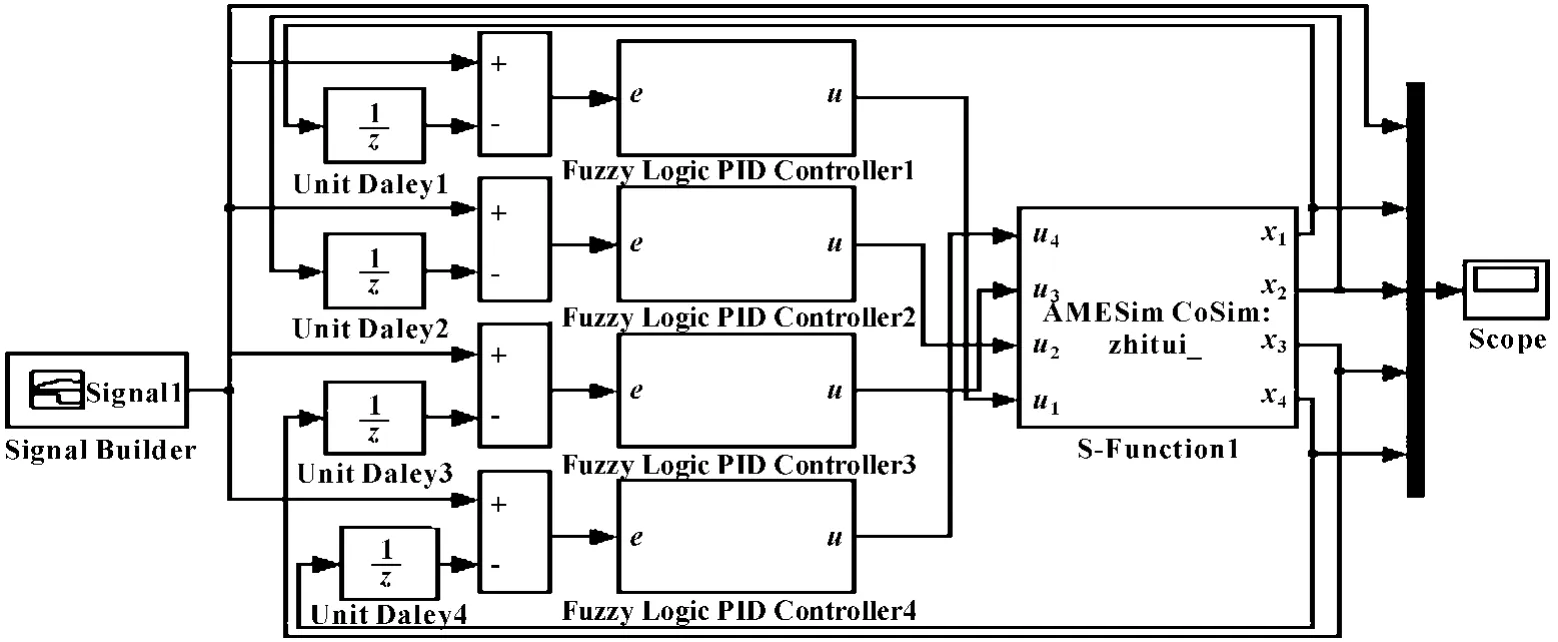
图7 在Simulink 中构建的控制系统仿真模型
在AMESim 和MATLAB/Simulink 中建立好图4、图6和图7的仿真模型后,在MATLAB 命令窗口中键入fuzzy 进入模糊逻辑编辑窗口,导入事先编辑好的FIS 模糊文件,确定模糊PID仿真参数:K'P=412、的比例因子分别为140、22、-55。设置好积分步长和算法,先进入AMESim 运行模式,将模型转换为S函数,然后再运行Simulink 环境下模型。
4.3 系统仿真结果
在仿真前,考虑到调平过程中车载平台左右对称,前后支腿受力不同,所以在AMESim 中设定调平时支腿1、2 受力为10 000 N,支腿3、4 受力为8 000 N。设定各支腿根据双轴倾角传感器采集的x、y 方向倾角计算出的理论上要调节的距离分别为:e1=0.04 m,e2=0,e3=0.02 m,e4=0.07 m。图8中,设定控制信号曲线5时,由于考虑到了系统的稳定性,所以设定调平第一阶段2.5 s 内控制信号为0.08 m,第一阶段平台调平完毕后,控制信号在t=2.5~4 s 内由0.08 m 增加到0.10 m,最后1 s 保持此位移,此过程为调平第二阶段。如果第一阶段控制信号设定为0.07 m,则调平时支腿2 将在0.07 m处上下波动,对系统稳定性将产生一定影响。图8—12是系统的仿真结果。
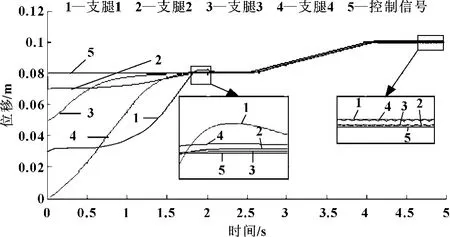
图8 常规PID 控制的支腿位移曲线
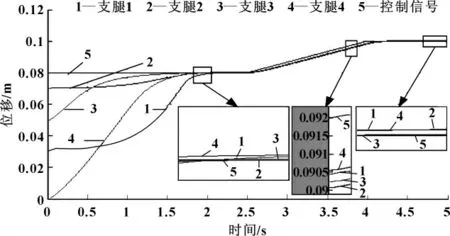
图9 模糊PID 控制的支腿位移曲线
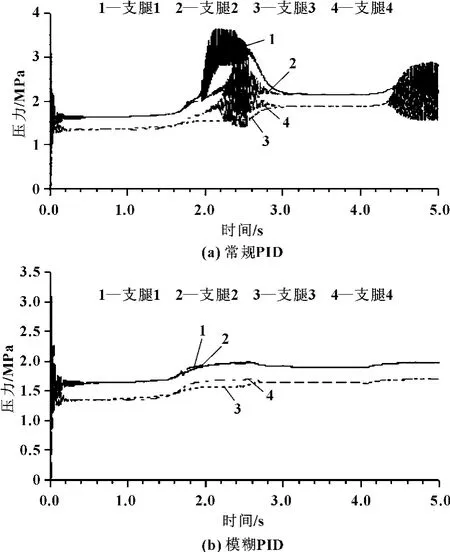
图10 常规PID 和模糊PID 控制的支腿无杆腔进油口压力曲线
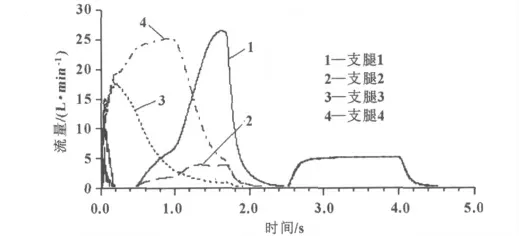
图11 支腿无杆腔进油口流量曲线
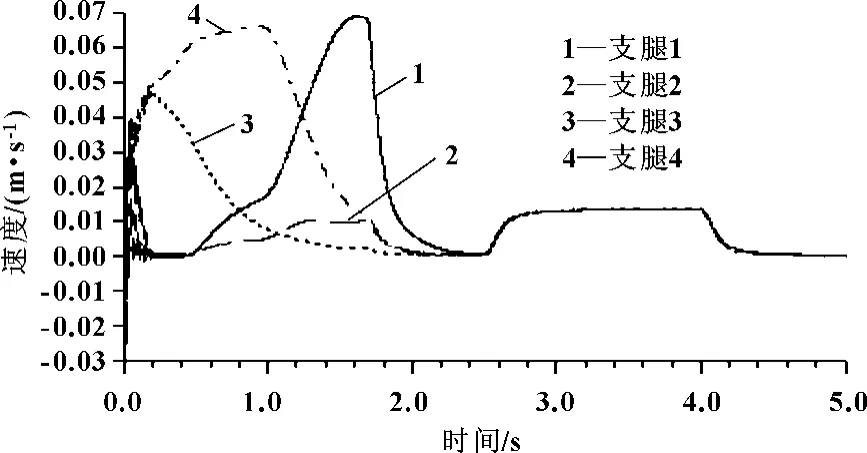
图12 支腿伸出速度曲线
在相同仿真条件下,图8为常规PID控制的支腿位移曲线,图9为模糊PID控制的支腿位移曲线,图10为常规PID 和模糊PID控制的支腿无杆腔进油口压力曲线,结果表明:模糊PID控制较常规PID控制效果好,超调量小,稳态精度高,具有更好的适应性和鲁棒性。从图8、图9也可以看出调平过程中各支腿实际调节距离分别在原来的基础上增加了0.01 m,第一阶段的“最高点”不动调平法在仿真中是以控制信号的给定值为最高点,四支腿同时以不同的速度向其靠近。假设调平精度为2',由公式(3)计算得出最高与最低支腿的位移差值为3.2 mm。由图9知,在调平第一阶段结束时、第二阶段四支腿同步伸出过程及调平结束时,支腿位移差仅0.5 mm 左右,完全满足调平精度要求。
从图10—12可以看出:由模糊PID控制的车载调平系统,在调平第一阶段,系统启动时4个支腿都有一点波动,但0.1 s 后消除,随后后支腿3、4 首先快速响应控制信号,接近控制信号给定位置时响应速度变缓,前支腿1、2 开始快速响应,这种情况是由泵的出口流量和各支腿伸出控制信号共同决定的。系统启动时模糊PID控制器根据各支腿需调节的位移,控制各支腿的电液比例换向阀阀口开度大小不一,但此时4个支腿伸出响应控制信号所需流量总和大于泵的出口流量,由图10可知前支腿受力比后支腿大,所以前支腿的控制阀口压差Δp 小,当系统启动时,由控制阀口流量公式知流进后支腿3、4 无杆腔的流量大于前支腿1、2,当后支腿3、4 伸出接近控制信号位置时,电液比例换向阀阀口开度减小,伸出速度减小,此时流进前支腿1、2 无杆腔的流量开始增大,当前支腿1、2 伸出接近控制信号位置时其伸出速度减小,到t=2 s时4个支腿基本同时到位,随后的0.5 s 中超调量较小满足精度要求,第一阶段调平结束。进入调平第二阶段后,由图11、图12可知流进4个支腿的流量相同,4个支腿的伸出速度也相同,t=4 s 后4个支腿同时伸出到位。
5 结束语
通过联合仿真表明:文中提出的基于模糊PID控制的车载设备平台动态调平控制系统可以有效解决传统调平控制系统存在的调平时间长、调平控制精度低、系统稳定性差等问题,对同类设备多液压缸调平控制系统具有一定的借鉴和指导作用。
【1】陆作其.车载雷达车座平台全自动调平系统的设计与实现[D].镇江:江苏大学,2009:13-23.
【2】郭晓松,占金春,冯永保,等.导弹发射台新型通用调平系统设计[J].机床与液压,2007,35(2):114-116.
【3】邓飙,邱义,张宝生.基于电液比例技术的快速自动调平系统[J].兵工自动化,2009,28(1):70-75.
【4】卢朝双.高精度、机电式车载雷达平台调平控制系统的研发[D].成都:电子科技大学,2007:19-22.
【5】江玲玲,张俊俊.基于AMESim与Simulink 联合仿真技术的接口与应用研究[J].机床与液压,2008,36(9):99-101.
【6】汪伟.重型车辆液压自动调平模糊PID控制研究[D].武汉:武汉理工大学,2009.
【7】张远深,张园成,刘晓光,等.基于AMESim与Simulink的柔性负载试验台变频式电液控制系统建模与仿真研究[J].机床与液压,2011,39(7):121-123.
