移动机器人网络遥操作系统设计
2013-03-17王殿君
王殿君
(北京石油化工学院机械工程学院,北京102617)
遥操作是操作者的感知和操作能力在远端的延伸和扩展。机器人遥操作系统可以将人的智能与机器人的智能有机地结合起来,利用人的智能进行高层次的感知理解、问题求解、任务规划以及任务分解等,利用机器人完成低级传感和控制、路径规划、精密运动、信息处理、常规和重复性的任务等工作。这样组成的人机智能系统就可以充分发挥人和机器人各自的优点。通过这种人机之间的协调和交互,不但可以增强机器人完成操作任务的能力,同时还拓宽了机器人的应用领域[1-2]。
对于以移动机器人为控制对象的网络遥操作系统,目前国内的研究工作相对较少,还没有建立比较完善的可以向普通网络用户提供服务的移动机器人遥操作系统。至今,国内的机器人远程控制系统还不多,无法广泛地进行机器人技术的普及、项目合作和资源共享[3-4]。
作者简要介绍了移动机器人控制系统,分析了机器人网络遥操作体系结构,开发了遥操作远端控制系统,并进行了机器人遥操作实验。
1 移动机器人控制系统
移动机器人系统总体框架示意图如图1[5-6]。
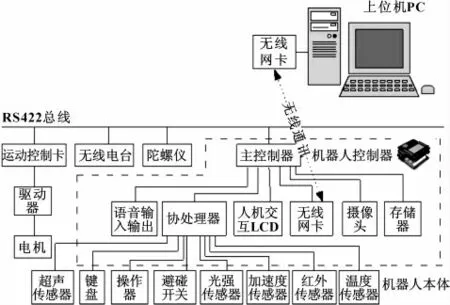
图1 机器人系统总体框架示意图
对于具有遥操作功能的移动机器人,其控制器设计要求如下:(1)功能强大,具有强大的运算和处理能力,能够处理视频信号、语音信号等;(2)接口丰富,具备多路直流电机、舵机、步进电机控制;音频、视频接口;多路高速A/D、多路高速D/A、以太网和主/从USB 接口等;(3)通用性,机器人控制器应当能够应用于移动机器人、教育机器人、护理床等服务机器人;(4)高可靠性和稳定性。
2 机器人网络遥操作体系结构
随着无线网络技术的发展和日益成熟,利用WLAN 和LAN 的混合组网,使基于网络的机器人远程控制成为一个热门的研究领域。
2.1 遥操作系统结构
移动机器人遥操作主要由视频的无线网络传输、用户和机器人的控制数据的交互、通用网页格式的遥操作界面组成。遥操作系统的总体架构和连接图如图2所示。
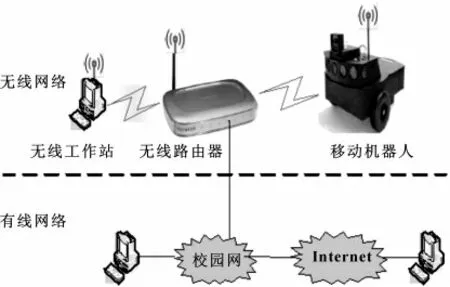
图2 遥操作系统的总体架构和连接图
机器人由自带的供电系统供电,数据连接由WLAN 无线网络实现,机器人可以不受电源和数据线缆的移动限制。由上位机控制器中无线路由器连接到局域网络,网络内的所有计算机都可以通过连接机器人遥操作服务器而实现视频和控制命令的传输。
2.2 遥操作应用模式
典型的基于互联网的遥操作模式是浏览器/服务器结构。该结构的应用主要由四大部分组成:浏览器、Web 服务器、应用服务器、数据库服务器及其他企业系统。浏览器/服务器应用结构如图3所示。

图3 浏览器/服务器应用结构
所设计的机器人远程控制系统是基于浏览器/服务器结构的三层分布式控制结构,遥操作移动机器人系统的逻辑结构如图4所示[7-8]。
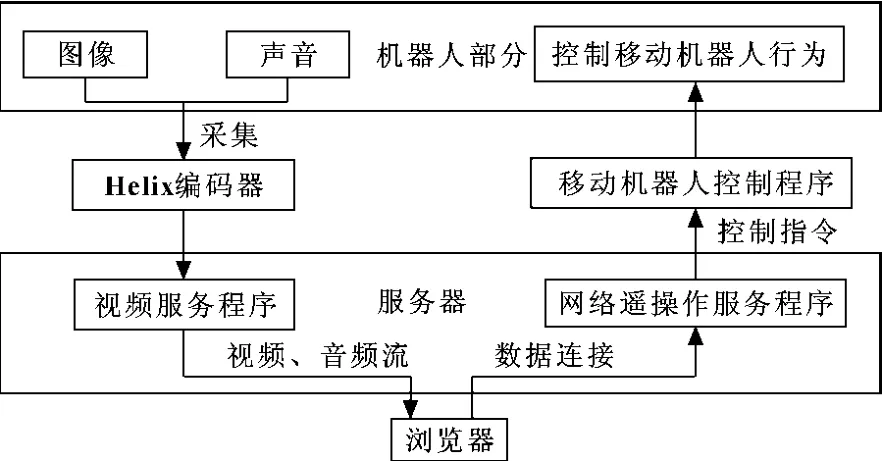
图4 遥操作移动机器人系统的逻辑结构
3 机器人遥操作系统设计
3.1 遥操作网络通讯
在Visual C++6.0 下建立一个完整的网络控制系统,遥操作网络通讯程序工作流程如图5所示。

图5 遥操作网络通讯程序工作流程
用于网络通讯的类包括一个网络接收类(CNetCmt)和一个网络发送类(CNetSend)。其中CNetCmt 的成员函数Listen 可完成网络监听的启动工作,成员函数AfterReceived 可以对接收到的数据进行处理。CNetSend 类的成员函数ConnectTo 用于连接远程监听端,成员函数Send 用于向已连接的远程端发送数据。
3.2 遥操作远端控制程序
VoyCmder 为发送端,里面直接通过CNetSend 类对象的ConnectTo 函数连接到发送端,然后通过Send函数发送控制指令,远端浏览器控制程序界面如图6所示。

图6 远端浏览器程序界面
3.3 机器人导航网页设计
建立了远程控制程序后,设计开发了导航网页。开启服务器上的IIS Internet 信息服务等服务程序。客户机在Internet 浏览器上通过服务器域名或IP 地址与服务器进行连接,服务器返回客户机网页页面在Internet 浏览器上显示。导航网页界面如图7所示,用户可以通过网页实现远程控制。

图7 导航网页界面
4 移动机器人遥操作实验
4.1 Helix 视频播放设置
Helix 软件是Real 公司新近开源的流媒体视频服务直播系统,在移动机器人系统中用于传输视频、音频数据,实现互联网直播。这里给出其配置过程:
(1)首先运行Helix Server 后台服务程序“Helix Server”,再打开本地的基于网页的服务配置界面“Helix Server Administrator”,在登录时输入安装Helix Server 时建立的用户名和密码即可登陆配置界面;
(2)其次在“服务器设置里”的“IP 绑定”项中设置本机服务器的IP 地址;
(3)最后在“安全设置”的“用户认证”建立本地或网络编码器连接此服务程序的认证用户名和密码,视频编码传入权限设置。
4.2 遥操作实验
实验所需软件设备为IIS Internet 信息服务、Helix 编码器、Helix 流媒体服务程序、机器人本地控制程序、机器人远端控制程序;硬件设备为可移动机器人一台、无线路由器一台、可接入网络的计算机2台。
实验过程为无线路由器将机器人上位机通过无线路由器连接到Internet 网络(禁用DHCP 服务)。两台可连入Internet 网络的计算机一台作为网络服务器,其上运行IIS 服务和Helix 流媒体服务。另一台计算机只需连入Internet 网络即可。
确保了三台计算机连入网络后,首先启动服务器上的IIS 和Helix 服务,再启动机器人笔记本上的Helix 编码器。最后用第三台电脑的Internet 浏览器访问服务器电脑进行实验测试。实验过程顺利完整,机器人端控制服务程序及Helix 编码界面达到预期效果,如图8所示。

图8 机器人端控制服务程序及Helix 编码界面
5 结论
(1)移动机器人采用基于浏览器/服务器结构的三层分布式控制结构。
(2)基于VC 开发了完整的网络控制系统,包括本地控制程序、远程控制程序和导航网页,并通过实验验证。
(3)基于网络的遥操作系统的设计为移动机器人系统的遥操作开发提供了依据。
【1】陆庆超,赵杰,闫继宏,等.基于虚拟环境的遥操作机器人主从交互系统设计[J].机械与电子,2011(7):51-56.
【2】曾理智,王珏,孙增圻.基于视觉反馈和预测仿真的Internet 机器人遥操作[J].计算机工程与设计,2007(9):2103-2106.
【3】崔峰,张明路.面向虚拟现实和遥操作的移动机器人同步定位与地图创建技术研究[D].天津:河北工业大学,2007.
【4】马良,闫继宏,赵杰,等.基于虚拟环境的多操作者多机器人协作遥操作系统[J].机器人,2011,33(1):169-173.
【5】李鑫,尤波.视频融合在遥操作机器人系统中的应用[J].微型机与应用,2010,9(9):41-43.
【6】赵明国,赵杰.Internet 模型与网络遥操作系统仿真环境的建立[J].高技术通讯,2002,12(7):63-67.
【7】赵杰,闫继宏,蔡鹤皋.基于Internet 的多机器人遥操作系统体系结构[J].高技术通讯,2003,13(12):47-52.
【8】王春荣,蔡勇,蒋刚.移动机器人定位技术研究[J].机床与液压,2011,39(21):57-59.
