桥式起重机的智能转载系统设计技术研究
2013-03-17杜文正童国林刘陈赵典
杜文正,童国林,刘陈,赵典
(第二炮兵工程大学202 教研室,陕西西安710025)
随着现代工业的不断发展,对起重机的自动化程度及安全稳定性提出了越来越高的要求。目前,国内很多研究机构在起重机智能控制研究方面取得了很大的进步,但大部分的研究都是集中在有操作人员控制的基础上,智能化程度并不高[1-2]。作者以桥式起重机为设计平台[3],以机器人导航技术[4-5]、起重机精确定位及智能消摆技术为基础[6-10],以实现桥式起重机自动化智能转载为目标,从机械传动、自动检测、电气控制、无线通信、软件设计、控制算法等6个方面设计了一套智能化程度较高的桥式起重机智能转载系统。
1 系统结构与功能
系统结构如图1所示。该系统由机械传动系统、工控机、无线通信系统、自动检测控制系统、电气控制系统等组成。工控机作为系统的上位机,是系统数据处理控制中心;无线通信系统完成工控机与自动检测控制系统、电气控制系统之间的通信;自动检测控制系统完成对传感器数据的自动采集与存储;电气控制系统接收工控机的指令,对起重机进行变频控制。系统在转载前,利用电气控制系统控制起重机大车运动带动安装在主梁上的激光测距扫描仪完成转载场地的地形扫描;工控机对扫描数据进行分析,建立空间环境模型并规划出一条能够规避障碍物的最优安全路径;在给定转载起点和终点的条件下,工控机利用运动控制算法向电气控制系统发出指令,控制起重机的3 个电机,沿着优化路径实现对负载的自动化智能转载;转载完成后,系统自动对转载场地的地形进行修复,为下一次的转载做好准备。
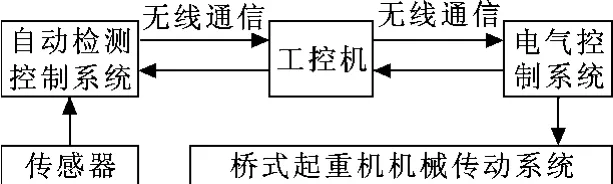
图1 系统结构图
2 机械传动系统设计
机械传动系统安装在桥架上,由大车传动、起升小车组成。
2.1 大车传动
大车传动由带制动的变频电机、减速机、车轮组及大车速度采集轮组成。车轮组采用定轴式;减速器采用输入与输出端同侧立式减速机、电机安装在横梁的上部,这样节约了大车传动所占用的空间,增大了起吊的工作范围;大车速度采集轮安装有测速的编码器,通过绞接的形式安装在大车运行机构的横梁上,为了避免大车在运行过程中由于轨道等原因车轮有时会出现打滑现象,速度采集轮通过弹簧力保证始终与轨道接触旋转。
2.2 起升小车
起升小车由小车运行机构、起升机构和车架组成。
小车运行机构采用两边分别驱动,减速机为硬齿面,减速机输出端为内花键,通过内花键与主动车轮组上的外花键联接传递扭矩。花键比单键联接传递的扭矩大,并且传递更加平稳。电机采用带制动的变频电机。一端的被动车轮上安装有用于测速的编码器。
起升机构采用欧洲技术生产的ZH 小车,减速机为行星架结构;行星架结构与传统减速机相比具有体积小、传动比大的优点;减速机齿轮全部为硬齿面,提高了齿轮的精度,传动过程噪声小;行星架安装在卷筒内,使整个起升机构更加紧揍。为了保证吊钩的对中性,缠绕在卷筒上的钢丝绳采用4/2 的出绳方式。起重量限制器采用轴销式,比传统的钢丝绳旁压式传感器传递的信号更加平稳可靠。电机采用电动葫芦起升专用的带制动的锥形变频电机,制动片内预埋有传感器,当制动片磨损到不能保证刹车力的情况下会发出报警,提醒操作人员更换摩擦片,避免了刹车力不够引起的溜钩事故发生。
小车架用于安装起升机构、小车运行机构和需要检测的各种传感器。
3 自动检测控制系统设计
自动检测控制系统是由数据采集模块和各类传感器组成,其原理图及安装位置如图2所示。系统采用施耐德公司生产的Modicon 系列M258 可编程控制器PLC 完成对传感器信息的采集和处理。主要传感器类型及用途包括:德国米依拉线式位移传感器分别用于测量大车、小车和吊钩的位移;德国Sick 公司生产的LMS291-S05 激光测距扫描仪[11]用于获取场地地形;西安中星公司生产的CS-2LAS 系列02 型加速度计用于测量x、y 两个方向的加速度,CS-2TAS-05 型双轴倾角计分别固定于激光测距扫描仪安装基面、承载梁1/4 跨度处和3/4 跨度处,测量x、y 两个方向的倾斜角度,用于修正激光测距扫描仪由于承载梁存在拱度而引起的测量误差,CS-VG-02 型垂直陀螺仪用于测量吊钩摆动角度和摆动角速率。
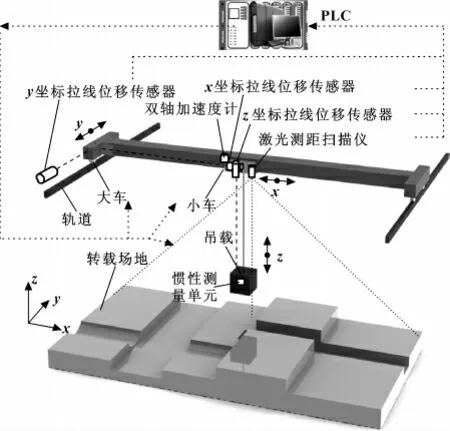
图2 自动检测控制系统原理图
4 电气控制系统设计
自动控制系统设计是以PLC[12]为核心,由PLC完成控制信号的输出,电机采用变频控制[13-14],工控机主要负责实现可视化操作界面、参数设置、起重机状态显示与记录、路径规划、起重机精确定位和智能消摆算法控制以及至少100 m 距离的远程监控等。系统整体方案如图3所示。

图3 电气控制系统方案图
起重机大车、小车和起升机构采用施耐德变频器进行变频控制,PLC 与变频器通过CANopen 机器总线通讯,PLC 与变频器子站通过PDO 组态实现对变频器内部寄存器的读写控制。CANopen 接线箱通过PLC的机器总线端口与控制起重机大车运行、小车运行和起升运行的变频器进行通讯链路,实现PLC 总站与变频器子站的通讯。电脑通过无线串口模块与PLC通讯,即可以通过串口读写PLC 内部寄存器的值。
5 无线通信系统设计
电脑通过无线串口模块与PLC 通讯,即可以通过串口读写PLC 内部寄存器的值。工控机作为上位机,通过写串口程序读写数据,遵循PLC 模块的通讯协议。电脑读取PLC 寄存器内存储的传感器数值,进行解析与处理,在软件界面上进行状态显示;向与变频器组态的PLC 寄存器写数据,通过控制变频器最终控制电机。
6 软件设计
软件设计分为上位机程序和PLC 程序两部分,上位机和PCL 通过无线串口协议进行通讯。上位机采用Visual C+ +进行编程,主要实现可视化界面操作,参数设置,起重机状态显示与记录,环境扫描与路径规划,起重机精确定位、智能消摆与远程控制以及串口通信。PLC 程序主要完成数据采集、存储与发送,接收上位机的变频控制指令完成对起重机的控制。系统软件结构如图4所示。
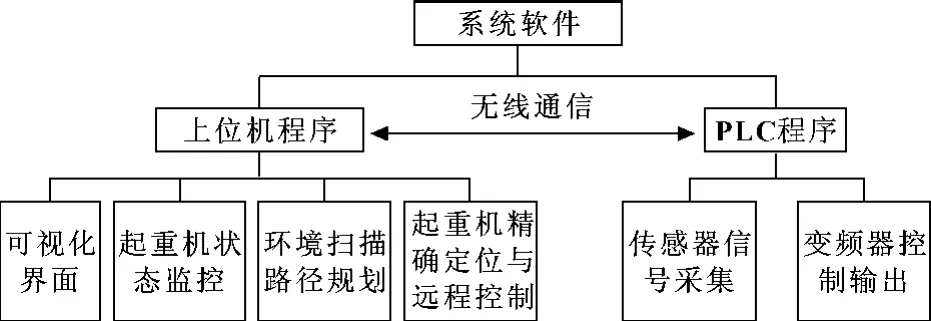
图4 系统软件框图
6.1 上位机监控程序设计方案
计算机监控程序在Visual C++环境下开发[15-16],并结合OPENGL 完成有关图形的处理。Visual C++是一个功能强大、兼容性好、对Windows 程序进行可视化开发的编程开发环境,是一个相当优秀的集成开发环境(IDE),它集代码编辑、调试、向导、编译和可视化资源于一体,所提供的MFC 更有助于程序的开发。软件界面如图5所示。

图5 软件界面图
6.2 PLC 控制程序设计方案
传感器信号的采集。通过PLC 扩展A/D 模块进行信号的采集,并存储于寄存器中。控制盒I/O 信号的采集及对变频器控制信号的输出,这一部分为PLC程序主要部分,采用梯形图编程,外部信号主要包括控制盒信号、各机构限位信号等。PLC 与变频器通过CANopen 机器总线通讯,使用PDO 组态关联,无需另外编写程序。
7 控制算法设计
7.1 基于AVBN 环境建模与遗传算法的路径规划
首先是工控机控制起重机带动激光测距扫描仪运动对转载场地进行测距扫描,依据起重机的起重限高与负载的高度确定障碍物的忽略高度,超过这一高度的设为障碍物,以这一高度为基面建立障碍栅格地图,在栅格地图的基础上进行AVBN 转载场地环境建模,利用遗传算法规划出负载运动的最优路径,其原理图如图6所示。

图6 桥式起重机路径规划算法原理图
7.2 基于模糊自适应PID 精确定位和消摆技术
双闭环模糊自适应PID 控制器又称模糊PID 参数自整定控制器,是将PID 控制器和模糊控制器串联在一起,以系统给定值和控制对象实际值的偏差值e 和偏差率ec 作为模糊控制器和PID 控制器的输入,用模糊控制器实时调整PID 的控制参量KP、KI、KD。该控制方式实时性强,控制精度高,不会出现常规PID 控制器造成系统超调、易振荡的现象,其原理图如图7所示。应用该算法能够使起重机控制负载沿着给定的路径点前进,有很好的定位与消摆效果。

图7 模糊自适应PID 控制器原理图
8 结束语
该系统经安装调试后,运行平稳,能够实现在给定转载起点和转载终点的条件下,控制负载沿着规划的最优路径完成安全无碰撞的转载。该系统有以下特点:
(1)系统采用基于障碍栅格的AVBN 环境建模方法,控制负载在确定高度的平面作二维运动,增强了系统的稳定性和实用性,在完成转载任务后,很容易对场地地形进行维护,而不需要重新对场地进行扫描,提高了自动转载的工作效率。
(2)系统友好的人机操作界面可以很方便地对起重机的运行状况进行监测。
(3)系统可靠性强,易调试,兼容性好,有很好的应用前景。
【1】董明晓,荷淑娟,宋传增.桥式起重机自动化可行性分析[J].起重运输机械,2005(8).
【2】郑亚青,吴建坡.2 自由度门式起重机器人的轨迹控制[J].机械设计与研究,2010,26(3):23-28.
【3】张质文.起重机设计手册[M].北京:中国铁道出版社,2001.
【4】蔡自兴,贺汉根,陈虹.未知环境中移动机器人导航控制理论与方法[M].北京:科学出版社,2009.
【5】蔡自兴.机器人学[M].北京:清华大学出版社,2000.
【6】徐沪萍,鲁凯生.基于模糊PID 控制器的桥式起重机大车定位控制系统研究[J].船海工程,2011(3):105-107.
【7】陶永华.新型PID 控制及其应用[M].北京:机械工业出版社,2005.
【8】姜向龙,程善美,李叶松,等.神经网络模型参考自适应控制算法研究[J].华中科技大学学报:自然科学版,2003,31(1):4-6.
【9】李寰,于承敏,许丽莉,等.SRM 的神经网络模型参考自适应控制[J].微计算机信息,2009,25(34):49-51.
【10】陈卫田,施颂椒,张钟俊.基于神经网络的非线性自适应控制[J].控制理论与应用,1996,13(5):545-552.
【11】sick 公司.Quick Manual for LMS Communication Setup.
【12】于胜旺,李晓勉,刘建刚.基于PLC 控制的桥式起重机电气设计[J].科技信息,2010(14):382-384.
【13】杨耕,罗应立.电机与运动控制系统[M].北京:清华大学出版社,2006.
【14】龚仲华.变频器从原理到完全应用[M].北京:人民邮电出版社,2009.
【15】谭浩强.C++程序设计[M].北京:清华大学出版社,2006.
【16】伍红兵.Visual C++编程深入引导[M].北京:中国水利出版社,2008.
