复杂背景下的颜色分离背景差分目标检测方法
2013-02-28吴青青许廷发闫辉徐磊吴威李相民
吴青青,许廷发,闫辉,徐磊,吴威,李相民
(北京理工大学 光电学院 光电成像技术与系统教育部重点实验室,北京100081)
0 引言
目标检测直接影响后期对目标进行识别跟踪的准确性。传统的目标检测方法如帧差法、背景差分法、光流法等都是基于灰度的检测方法。尽管国内外学者研究了很多的改进方法来解决基于灰度方法目标丢失的问题[1-3],但其局限性也越来越明显。有学者将颜色和形状信息结合起来,对复杂场景下的圆形区域进行检测,这种方法能增加检测准确度,提高检测的鲁棒性[4]。文献[5]利用颜色分离的方法检测交通路口车流和人流运动方向。文献[6]结合轮廓信息和颜色信息来检测具有特定轮廓的目标。文献[7]根据目标的主要颜色,利用颜色分布直方图来对目标进行检测跟踪。有学者提出了一种基于颜色信息的背景差分的改进方法[8],将背景差分扩展到3 个颜色通道进行,各自差分结果相加后再对整体差分结果进行阈值二值化提取运动目标。这在一定程度上解决了目标检测方法中存在的灰度图像下无法较好辨识颜色差别的弊端。
但是,该方法在二值化之前进行差分结果相加,使得每个通道的个体差异融入了整体差异中,再进行二值化时,特定通道的差异可能被消除,影响了检测的精确性。
针对以上问题,本文提出了复杂背景下的改进的RGB 颜色分离的背景差分目标检测方法,提高了颜色分离方法的有效性。
1 改进的RGB 颜色分离的背景差分目标检测方法
传统的背景差分法是将彩色图像转化成灰度图像,利用前景图像与背景图像做差来得到目标的方法,如(1)式。得到差分图像后,为了消除噪声,需要按照设定阈值进行图像二值化,如(2)式。
式中:F(x,y)为前景图像;B(x,y)为背景图像;D(x,y)为差分图像;I(x,y)为目标图像;θ 为设定的阈值。
这种方法可以有效检测出运动目标,但是在图像差分之前进行灰度转换,如(3)式,图像中的颜色信息将大幅减少。从(3)式可以看出,不同的(R、G、B)颜色分量组合有可能转换出相同的灰度值,如果再考虑阈值的存在,一旦远动目标上的点本身与背景有颜色差异,转换后的灰度值却与背景相同或者在阈值允许的范围内,就无法检测出该点的差异,导致目标检测准确性降低。

本文方法首先将当前帧和背景帧图像进行RGB三通道分离,分离后的图像分别进行背景差分,如(4)式,再分别对差分图像进行阈值二值化,如(5)式。
式中:i=R,G,B;Fi(x,y)为前景图F(x,y)分离出来的第i 通道的图像;Bi(x,y)为背景图B(x,y)分离出来的第i 通道的图像;Di(x,y)为第i 通道的差分图像;Ii(x,y)为各通道阈值化后的结果图像;θi为各通道的设定阈值。
得到各通道结果图像Ii(x,y),考虑所有通道的差异性,将3 个通道的结果图像进行或运算,最终得到完整的目标图像。

方法的主要流程如图1 所示。
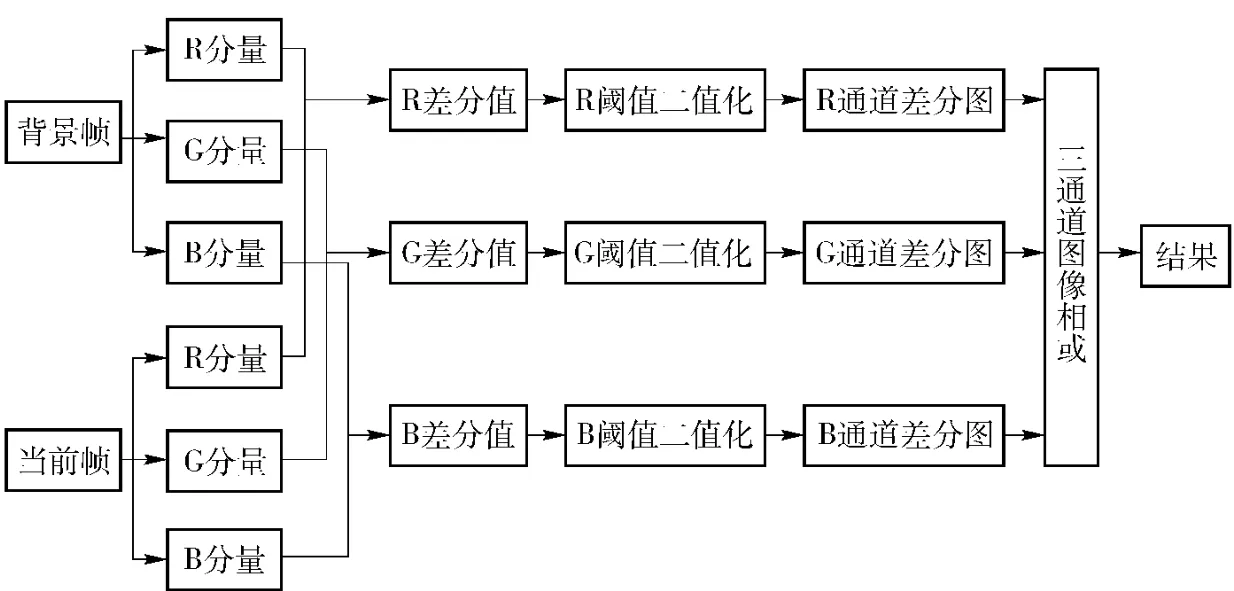
图1 颜色分离背景差分法流程图Fig.1 The flow chart of color separation background subtraction
假设每次做差分会引进系统噪声ξ(x,y),且近似认定每个通道差分引入的噪声相同。那么三通道每次差分都会引入一个相同噪声ξ(x,y).传统方法在差分之后直接进行三通道差分值的绝对值求和,如(7)式,会造成系统噪声放大3 倍,必须提高阈值消除噪声。
假设以下情况:给定阈值θ(θ >3ξ(x,y)),对于某一点(x,y),IR(x,y)=α,且θ >α >θR,IG(x,y)=0,IB(x,y)=0,但是同时这个点上噪声很小或为0,即ξ(x,y)为0 或者很小可以忽略不计,那么按照(7)式,则D(x,y)=α,因为阈值为θ,所以I(x,y)=0,则这一点会被误认为是噪声而消除。而事实上,R 基色下已经检测出差异,按这种方法,不能把这个差异反映到最终结果中,最终结果也就不再完整。

为了更清楚的说明问题,用矩阵形式表示以上情况,如图2 所示。

图2 传统方法效果示意图Fig.2 The example of traditional method
如果使用本文方法,每个通道差分图像先进行阈值二值化,之后再相或,如(4)式~(6)式所示,则阈值不会太大,每个通道的差异都会在结果图像中显示出来,如图3 所示,就能够更好地提取完整目标。

图3 本文方法效果示意图Fig.3 The example of proposed method
为了验证本文方法,选取5 个不同场景,分别用本文方法和传统方法进行目标检测实验,在没有运动目标情况下,测试对噪声的抑制能力。其中,本文方法中各通道阈值θi为45,传统方法阈值θ 分别取45、60、80、120.实验结果如表1 和表2 所示。
从表1 和表2 中可以看出,当传统方法取较小阈值时,对噪声没有很好的抑制作用,相同阈值下,本文方法对噪声的抑制作用更有效。当传统方法的阈值很大时,对噪声的抑制作用很明显,对目标像素的抑制作用也将很大,造成检测不完整。将传统方法阈值调高到120,本文方法阈值不变,对两种方法再进行测试,用检测到的目标像素个数来评价运动目标检测的效果。
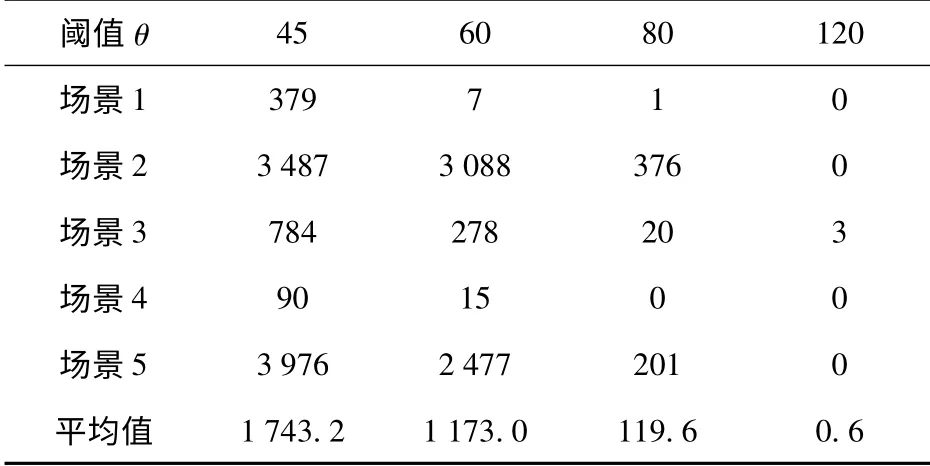
表1 传统方法不同阈值下的噪声像素个数Tab.1 The number of noise pixels obtained by traditional method

表2 本文方法不同场景的噪声像素平均个数Tab.2 The average number of noise pixels obtained by the proposed method
实验结果如表3 和表4 所示。从实验结果中看出,当阈值太高时,传统方法的检测结果与本文方法结果相比,减少了许多像素点,结果明显不完整。

表3 传统方法θ 为120 时不同场景检测到的目标像素个数Tab.3 The number of object pixels obtained by traditional method for θ=120

表4 本文方法不同场景检测到的目标像素个数Tab.4 The number of object pixels obtained by the proposed method
2 边缘差分结果修正
由表2 得出,本文方法对噪声有一定的抑制作用,但是,在光照变化的情况下,各通道颜色敏感度不同导致的噪声对实验结果有很大的影响。
采用一种边缘差分方法对结果进行修正,主要是采用边缘检测差分法对光照不敏感的特性,可以被用来修正之前得到的前景图像,获得噪声更少的目标图像。
提取当前帧和上一帧的边缘图像并做差分运算,得到运动目标边缘的前景图像。结果图像的不完整性不能用来提取运动目标,但是能提供运动目标的大概轮廓和范围。利用该特征对(6)式得到的结果进行修正,修正公式如(8)式。
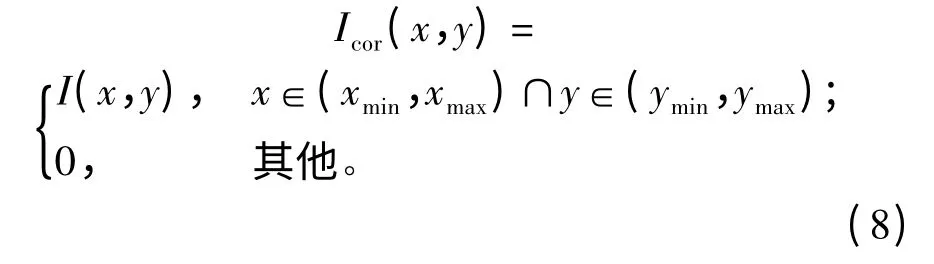
式中:xmin、xmax、ymin、ymax为边缘检测差确定的矩形目标轮廓的角点坐标。本文选用canny 算子进行边缘检测差分计算。
3 自适应权值背景更新
背景更新一般是每隔N 帧图像进行一次更新,或者使用高斯混合模型进行更新。高斯混合模型在判断参数是否需要更新和如何更新时计算量大,降低了系统的实时性。普通相隔N 帧的背景更新,在刚更新完背景的N 帧之内对光照和环境变化非常敏感。本文方法中,使用递推法逐帧实时更新背景,为了适应颜色分离差分法,对三通道各自独立更新,递推公式如(9)式。
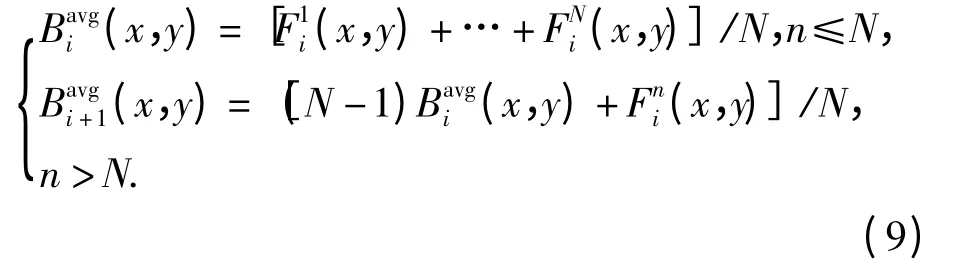
前N 帧时,暂时使用帧差法来提取目标,同时计算前N 帧图像的平均值用来做N 帧之后的背景。N 帧之后,对新的图像帧,递推计算出新的背景帧,同时该背景帧回归作为计算下一帧背景的基准。即每帧图像都会被按比例计入背景图像中,更新之后成为下一帧的背景。
为了让该递推方法对光照突变有更好的适应性,将(9)式中的系数做改进,如(10)式,其中α +β=1.

一般来说,α≫β ,只有这样,当前帧的目标才不会对背景的构造有较大影响。当光照突变时,要尽快将光照的全局影响体现到背景中,需要提高β 的数值大小。按照光照变化程度的不同,设定3 个更新模式,根据光照对图像的全局影响,自适应选择更新模式,表5 说明了各模式对应的β 大小。
图4 是按照这种方法构造的RGB 三通道背景,其中β 取0.02.
这种方法优点是能够快速适应环境和光照变化,对于目标停留能做出快速反应,不会长时间影响对其他运动目标的检测。其缺点是,β 值不能过大,否则目标停留之后在前景中消失得太早,不利于后续目标识别和跟踪。
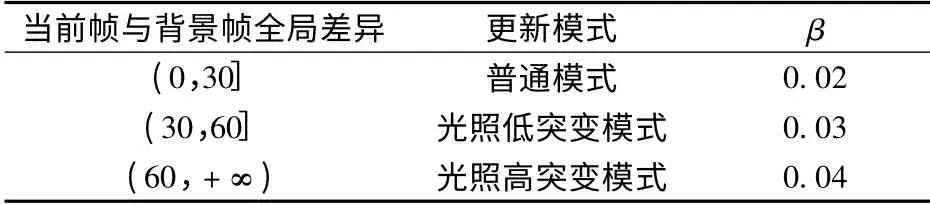
表5 更新模式与β 值大小Tab.5 Update modes and β values
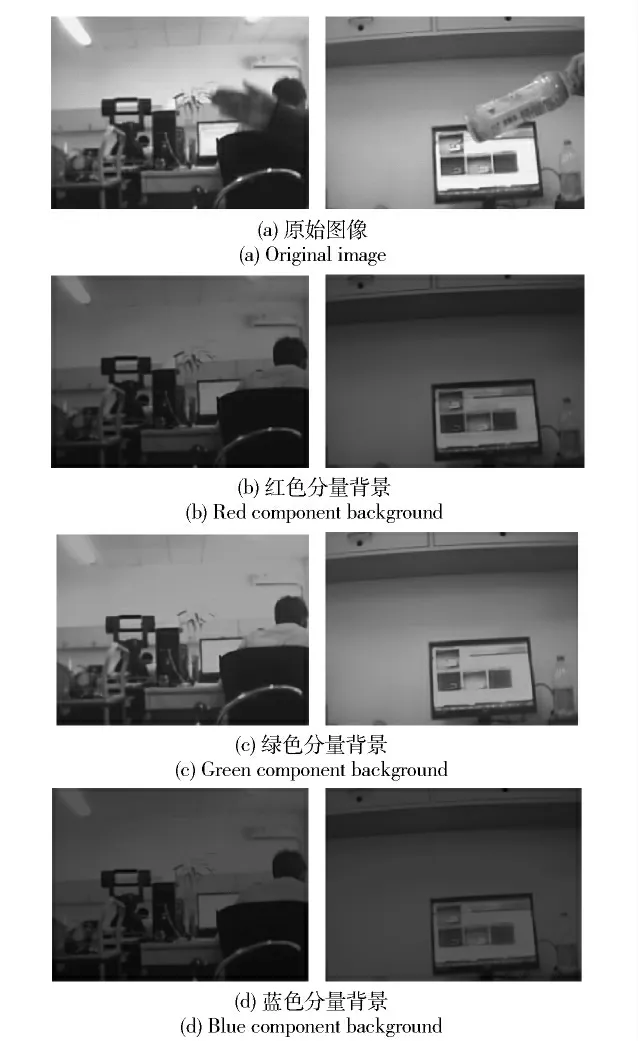
图4 分通道逐帧更新构造的RGB 三通道背景Fig.4 Backgrounds of each channel created using proposed updating method
4 仿真测试实验
对本文方法进行了一系列的仿真实验。实验中β 取0.02,各通道阈值θi取45,由摄像头实时采集图像,摄像头像素为30 万。
首先对帧间边缘差分修正光照对三分量分离背景差分法的影响进行验证,如图5 所示。
把本文方法与传统背景差分法进行比较,实验结果如图6 所示。
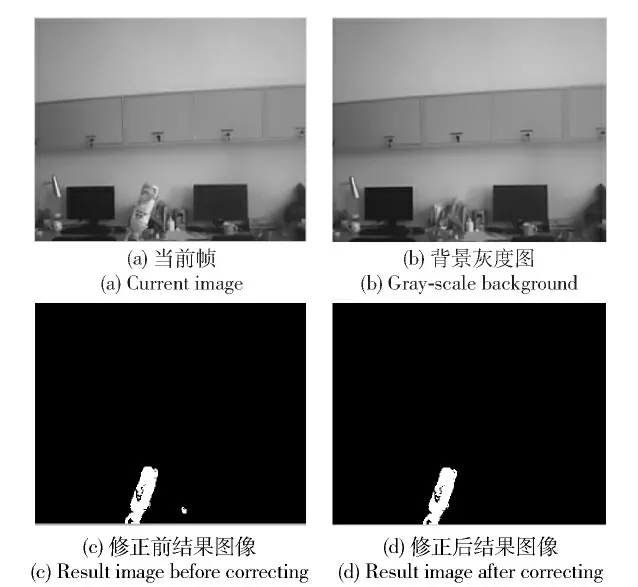
图5 帧间边缘差分修正光照影响Fig.5 Light influence modified by edge subtraction
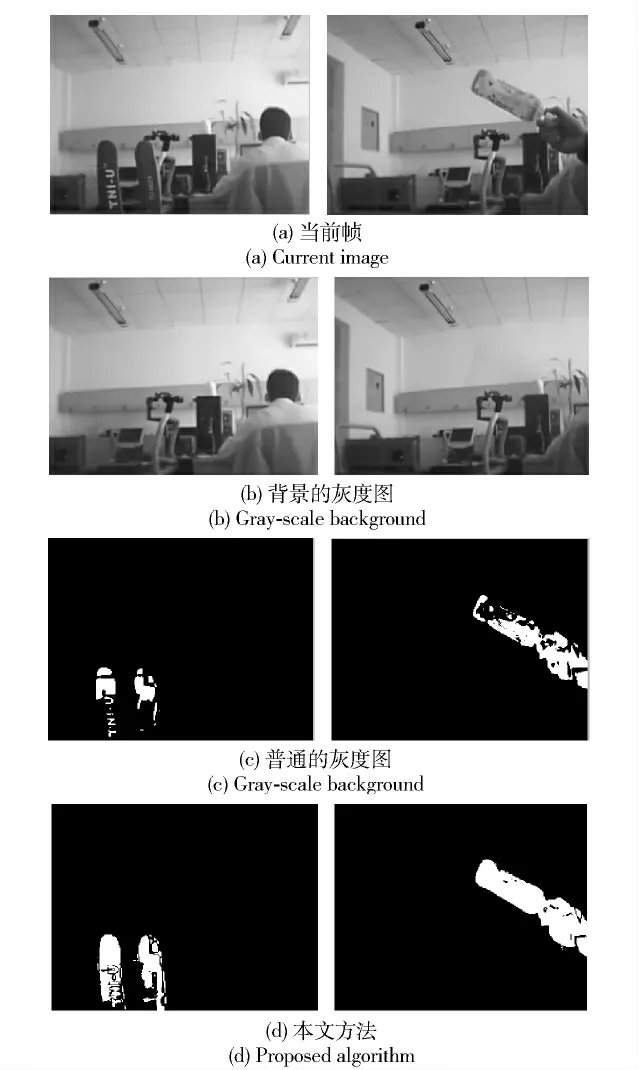
图6 本文方法与传统背景差分法实验结果对比Fig.6 Result contrast between background subtraction algorithm and proposed algorithm
该实验中,设定普通背景差分法阈值θB为45,与θi数值相同。可以看出,本文方法所提取的目标比传统背景差分法提取的目标更加完整,细节更加丰富。
为了说明本文方法对前文提到的三分量和方法的改进效果,做了对比实验,其中θi取45,θ 分别取80、60、45.得到的实验结果如图7 ~图9 所示。
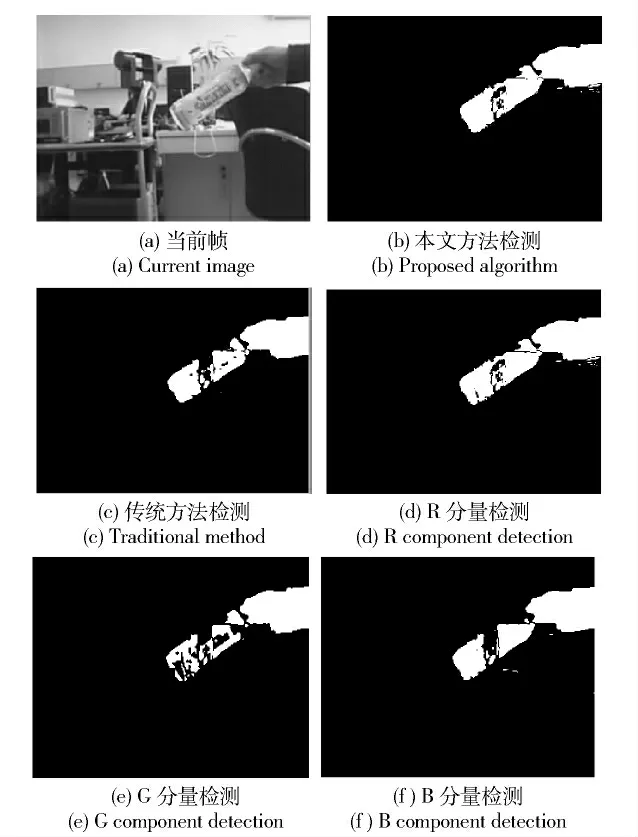
图7 当θ 取80 时本文方法与传统方法的实验结果Fig.7 Results obtained by proposed algorithm and traditional method for θ=80
实验结果基本与分析的一样,传统方法差分值求和之后再进行阈值化,要求阈值必须足够大,才能消除噪声的干扰,阈值太小就不能完全消除噪声,如图9(c)所示。阈值大的时候虽然消除了噪声,但是目标提取的就不完整,如图7(c)所示。
5 结论
本文提出了改进的基于RGB 颜色分离的背景差分方法,将彩色图像分离成各自独立的RGB 三通道图像,将对应的通道进行背景差分运算,得到各通道的前景图像,为了完全保留各通道的差异,将3 个通道前景图像的信息融合,得到完整前景图像。利用边缘检测结果不受光照影响的特性,对前景图像进行修正。从实验结果来看,普通背景差分法使用灰度值处理,目标上一些颜色不同但灰度与背景相近的部分无法提取出来,但是本文方法可以较好解决这样的失检问题。同时,与传统方法相比较,也拥有更高的检测效率。
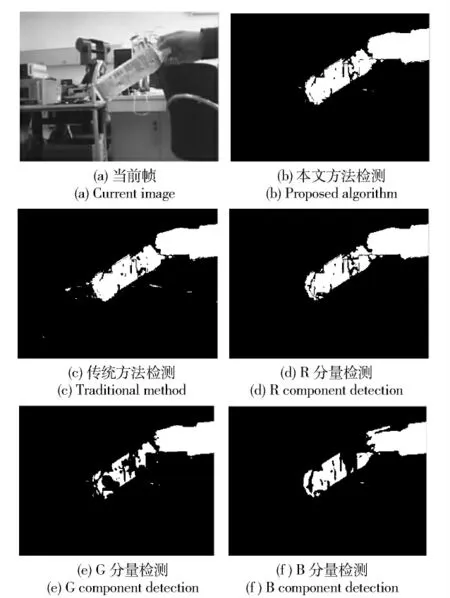
图8 当θ 取60 时本文方法与传统方法方法的实验结果Fig.8 Result contrast between proposed algorithm and traditional method for θ=60

图9 当θ 取45 时本文方法与传统方法的实验结果Fig.9 Result contrast between proposed algorithm and traditional method for θ=45
References)
[1]施家栋,王建中,王红茹.基于光流的人体运动实时检测方法[J].北京理工大学学报,2008,28(9):794 -797.SHI Jia-dong,WANG Jian-zong,WANG Hong-ru.Real-time human motion detection method based on optical flow[J].Transactions of Beijing Institute of Technology,2008,28(9):794 -797.(in Chinese)
[2]罗铁镇.基于混合高斯模型的运动检测及阴影消除算法研究[D].长沙:湖南大学,2010.LUO Tie-zhen.The research of motion detection and shadow elimination algorithm based on Gaussian mixture model[D].Changsha:Hunan University,2010.(in Chinese)
[3]田洪宁.基于运动目标检测跟踪的智能监控系统设计实现[D].北京:北京工业大学,2011.TIAN Hong-ning.Intelligent monitoring system design based on detecting and tracking moving targets[D].Beijing:Beijing University of Technology,2011.(in Chinese)
[4]Zhang H Y,Yang F,Wu Y D,et al.Robust color circle-marker detection algorithm based on color information and Hough transformation[J].Optical Engineering,2009,48 (10):107202 -107202.
[5]Sooyeong K,Hyeran B.Detection of dominant flow and abnormal events in surveillance video[J].Optical Engineering,2011,50(2):27202 -27202.
[6]Peter R,Iztok K,Zdravko K.Progressive method for color selective edge detection[J].Optical Engineering,2007,46(3):37004-37004.
[7]Cheng E D,Massimo P.Disjoint track matching based on a major color spectrum histogram representation[J].Optical Engineering,2007,46(4):47201 - 47201.
[8]胡栋.人体异常行为识别算法研究与实现[D].成都:电子科技大学,2010.HU Dong.The body's abnormal behavior identification algorithm research and implementation[D].Chengdu:University of Electronic Science and Technology of China,2010.(in Chinese)