康复训练机器人
——保持健康体魄,安享幸福晚年
2013-02-24东南大学仪器科学与工程学院南京210096东南大学自动化学院南京210096华中科技大学软件学院武汉430074中国科学院合肥物质科学研究院合肥230031常州市钱璟康复器材有限公司江苏常州213164
(1 东南大学仪器科学与工程学院,南京,210096;2 东南大学自动化学院,南京,210096;3 华中科技大学软件学院,武汉,430074; 4 中国科学院合肥物质科学研究院,合肥,230031;5 常州市钱璟康复器材有限公司,江苏常州,213164)
康复训练机器人
——保持健康体魄,安享幸福晚年
李会军1,宋爱国1,费树岷2,胡雯蔷3,宋全军4,申林5
(1 东南大学仪器科学与工程学院,南京,210096;
2 东南大学自动化学院,南京,210096;
3 华中科技大学软件学院,武汉,430074;
4 中国科学院合肥物质科学研究院,合肥,230031;5 常州市钱璟康复器材有限公司,江苏常州,213164)
本系统通过遥操作机器人技术、计算机网络技术与现代康复医学理论相结合,研制成功多款异构型康复训练机器人样机,辅助老年人等肢体运动功能障碍人群进行康复训练,并构建网络化远程康复训练机器人系统,实现一个治疗师可以同时监视和控制多台康复机器人对多个老人进行康复训练。该系统以北京四季青敬老院和上海市第一福利院为平台进行应用示范应用,得到了较好的评价。
机器人,康复训练,网络化,远程监控
1 背景
我国已经进入老龄化社会,据世界卫生组织预测,到2020年我国老年人口将达到2.5亿以上,而老年人失能占全人口失能总数的49%,失能率达到19.5%。这给家庭和社会带来了沉重的负担。为了帮助这些残障者和肢体功能退化的老人提高生存质量,国内外相关研究机构将机器人技术应用于康复医疗领域,竞相开展康复机器人技术的研究并取得一些重要成果。美国NSF残疾人项目部主任Jaeger在2006年年度研究报告中指出,为了从根本上提高残疾人生活质量,机器人研究基金资助的重点已由生活辅助机器人转向康复训练机器人的研究。
近年来,随着计算机网络技术和遥操作机器人技术的发展,遥操作机器人技术逐渐在远程医疗、远程手术、远程康复等领域得到应用。网络化的康复机器人与康复治疗师相比,在康复临床应用方面具有诸多潜在优点,如:一方面,通过网络控制,康复机器人能给患肢提供长期的、精确的、量化的运动刺激和引导,并记录训练者在各个训练阶段详实的康复治疗模式与参数、训练者对应的生理数据或图形信息,提供客观、准确的治疗和评价参数,有助于医师深入分析、研究康复治疗模式与治疗效果,设计合适的、个性化的康复训练方案;另一方面,医师和训练者可以通过网络实现远程一对多的康复训练,使社区和家庭康复医疗成为可能。与传统的康复训练机器人系统相比,远程康复机器人系统无论对训练者和治疗师都更为经济便利。
东南大学、华中科技大学、中国科学院物质科学研究院以及常州市钱璟康复器材有限公司联合开展研究,针对我国康复医疗领域目前面临的“康复治疗师少而训练者众多”的突出矛盾,研制成功网络化远程康复训练机器人产品样机,利用网络传输图像和传感器数据,使治疗师能够在控制中心同时远程监控多个老年人的康复训练过程,并根据不同老年人的情况在线调整康复训练方案,老年人则在治疗师的远程指导下进行康复锻炼。
2 主要构成与功能
本康复训练机器人系统主要开发构建了一对三的远程康复训练机器人网络化体系。远程康复训练机器人系统主要有三大功能模块:康复训练功能模块、信息传输功能模块以及远程康复监控与评价模块,系统结构如图 1所示。
1)康复训练功能模块
训练者端根据系统提供的治疗方案可对老年人进行四种模式的康复训练:被动锻炼模式、主动锻炼模式、阻尼锻炼模式和助力锻炼模式。在训练过程中,为了让老年人了解自己训练相关信息,同时将这些信息和康复评价的数据(运动和生理信息)发送到康复医师端,机器人应在训练患肢的过程中将有关信息和数据检测出,以便显示给老年人或发送并存储到康复医师端的数据库中。
2)远程康复监控与评价模块
根据康复训练功能模块存储到数据库中的数据,通过与以前数据的比较,系统对老年人的康复做出新的评价,在必要时调整和优化治疗方案,并将新的治疗方案发送到训练者客户端,在康复训练功能模块中付诸实施。
3)信息传输功能模块
根据康复训练功能模块提取的信息,将其中部分信息以直观的多媒体方式显示给老年人,使老年人能够实时地了解到自己康复的程度、训练完成的好坏等等,并将检测到的数据信息以及音视频信息通过网络发送到治疗师端(服务器)。
2.1 康复训练功能模块
训练端康复训练系统获取病人锻炼的视频和语音信息,通过网络发往医生端的计算机,医生根据病人端反馈的图像和数据,判断病人的康复情况,并通过计算机远程设置康复训练参数,如:主/被动训练模式、机械臂的运动范围、运动速度、牵引力或阻尼力的大小等。其中,训练端康复锻炼系统由机械臂、传感器、电机、磁流变阻尼器、测控电路以及计算机组成。与机械臂串联的位置传感器和力传感器将检测到的运动和力信号首先经调理放大送入测控电路,后经单片机预处理通过USB接口送入训练端计算机,训练端计算机则将这些信号与医生远程设定的参数进行比较,采用一定的控制算法,发出控制指令,该指令通过USB接口送给测控电路,控制电机工作,从而控制机械臂的运动和牵引力/阻尼力。
康复训练机器人采用本课题研制的异构式机构,可以帮助训练者进行上下肢主/被动模式训练,如图 2所示。生理信息模块可以检测脉搏、血氧、呼吸、肌电和肌张力等,对生理信息的采集是可裁剪的,医师可以指导某位病人需要采集哪几样信息或是否采集生理信息。其中,脉搏通过HK2000B测量,血氧可以通过光电监测指尖的透光率测量,呼吸可以通过温敏传感器测量,肌电通过电极片采集,肌张力可通过压电陶瓷来测量,测量的结果可以通过蓝牙模块传递到训练者控制端。

图1 网络化一对多远程助老助残康复机器人系统构架图

图2 本项目设计的多种异构型康复训练机器人
训练者客户控制端主要由一台具有网络接口的微机组成。主要功能有:机器人控制单元、本地通信单元(蓝牙)、游戏单元、视频音频单元、网络接口单元、人机交互单元等。机器人控制单元主要负责ADC采样、DAC数模转换等;本地通信单元则表现为与生理信息采集模块与控制端可以进行蓝牙点对点通信;游戏单元为用OpenGL编写的康复训练小游戏(篮子接球);视频音频单元包括对摄像头的驱动、图像采集存储和显示;网络接口单元负责对网络接口设备的驱动、数据的传输;人机交互单元负责显示屏和触摸屏的驱动和显示,系统结构框图如图 3所示。

图3 康复训练系统中客户端组成结构框图
为了防止训练过程中的二次损伤,研究了适用于康复训练机器人的流变式无源电机研制及其驱动技术,对流变材料的阻尼力特性进行大量的实验研究,建立流变特性模型,在此基础上研制流变式无源电机,设计了安全、稳定、可靠的康复训练机器人驱动系统。在老人或残障者进行主动康复训练过程中,该电机采用被动力反馈输出的方式提供可控的阻尼力,提高了康复训练的安全性,图 4显示了磁流变电机在康复训练机器人中的应用。训练者客户端主要交互信息包括本地的视频信息、生理信息和相关训练信息、康复机器人控制命令以及主动康复训练时的虚拟现实游戏。

图4 磁流变电机在康复机器人系统中的应用
客户端利用虚拟现实技术构建了友好的人机交互界面,包括视频窗口、控制选择、相关训练数据的显示以及康复游戏和音视频聊天等功能。在康复游戏中,训练者通过控制康复机器人机械手臂控制游戏中的物体(汽车或篮子)运动,实现训练者和虚拟环境的视觉和力觉交互,增加了训练者康复训练的趣味性,如图 5所示。

图 5 康复训练客户端虚拟游戏界面
为了检测康复训练过程中的运动相关信息,训练者客户端还包含表面肌电、脑电、血动力学等运动相关信息的检测仪器,可以检测包括人机交互力、运动速度、肌电、肌张力、血动力学、运动呼吸气体等六类生理信息通过网络将检测的运动和生理参数反馈到治疗师端,以数据或曲线的形式显示,同时将数据存入服务器端的数据库。图 6显示了生理信息检测模块的实现框图。
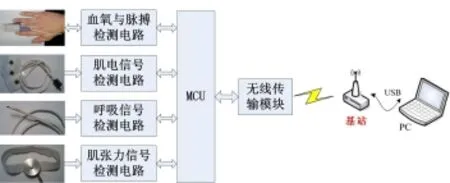
图 6生理信息检测模块
2.2 远程康复监控与评价模块
远程康复监控与评价模块设置在医师服务器端,该服务器需要提供数据库支持和网络接口,支持视频监控。本系统中的医师服务器为每个用户建立电子病历,提供电子查询功能,无论用户在哪台终端(康复训练机器人)上锻炼,只要身份识别有效,就可以继续前次锻炼的设定或给出定制计划。当某位训练者需要就医或康复锻炼时,可以通过网络登入远程的医师服务器,医师服务器通过训练者输入的账号密码调取已经存储在服务器上的训练者的病例,通过分析此数据和观察当前训练者端传过来的视频等信息,医师给出康复锻炼意见或指定康复锻炼模式。如图 7为远程康复监控与评价模块的实现功能框图。

图 7 远程康复训练机器人网络化交互系统功能框图
治疗师可以在服务器端通过网络监控到老人/残障者的康复训练情况,主要包括训练者的视频信息、运动信息和生理信息的数值显示和图形化显示、康复机器人工作状态、训练控制命令以及训练者个人基本信息和训练信息的数据库存储、查询、修改、删除等操作。
治疗师端(服务器)的交互界面主要包括服务器设置部分、训练者的视频显示、相关训练数据的数值显示以及训练控制选项窗口。监测的生理参数等信息可以在数值显示和曲线显示之间进行切换,为治疗师提供直观的信息反馈,如图8所示。

图8 治疗师监控端工作界面
2.3 通信模块
本系统中网络通信主要使用的是TCP/IP协议。在TCP/IP网络应用中,可以是在一台机器上执行一部分功能,在另一台机器上执行另一部分功能,这两部分功能整体构成一个完整的应用程序。客户机/服务器模式(Client/ Server,C/S)是TCP/IP网络中两个进程间相互作用的主要模式。本系统采用客户机/服务器模式实现多个康复训练机器人与治疗师之间的信息通信。
2.3.1 控制命令网络通信
康复训练的控制命令包括模式和等级两部分,模式分为停止、主动和被动,等级分为简单、一般、有点难度、很有难度四级。
为了防止数据传输过程中出现错误而致机械手臂控制错误,进而对训练者造成二次伤害,当康复医生端发送控制参数时,系统采用了多次发送并回执验证的机制。服务器设置康复模式和参数后,系统连续三次重复发送,客户端判断三次数据是否相同,并向服务器端发送回执数据。如果回执数据与设置的实际数据一致,则客户端控制机械臂执行既定模式和参数,否则丢弃本次传输再次重新发送。这种方式是在硬件控制安全可靠性的同时,软件再次进行安全可靠性的验证。对于康复训练者这一特殊群体,采用这种方法是非常必要的。
2.3.2 监测数据通信
训练者康复训练时的相关数据在本地电脑上显示,并通过网络传输到治疗师的电脑上也进行显示。训练者端和医生端进行监测数据的网络传输,首先应当建立网络连接。在数据传输建立的前提下,根据实际需要,客户端每采集一至五组位置和力矩信息向服务器端发送一次,内容包括工况、位置、力矩和生理数据等。
2.3.3 视频通信
视频部分网络传输采用完成端口模型实现。本系统采用USB摄像头作为视频采集设备,只要USB摄像头能正确连接到PC机且驱动安装正确,DirectShow就能把它包装成一个源过滤器,并在一定的类型目录下注册,完成图像采集,经过H.264技术对视频图像编解码,发送到治疗师监控端,使用DrawDib技术实现视频显示。
2.3.4 音频通信
本系统使用微软实时通信(RTC,Real Time Communicate),API创建简单的点到点聊天对话,具有噪声小、效率高、开发简单等特点。
3 示范应用
东南大学、华中科技大学、中国科学院物质科学研究院以及常州市钱璟康复器材有限公司强手协作,利用研制的异构式样机构建了网络化远程康复训练机器人系统,可实现基于网络的远程音视频、生理信息监控和训练参数调整,训练者可在友好的人机交互界面下进行训练,如图9所示。该系统通过网络连接3台康复训练机器人与一个治疗师监控器,每台康复机器人均可为老年人提供不同模式和不同难度的康复训练,而治疗师则通过网络对老年人的训练情况进行远程监控。本项目构建的一对多远程康复训练机器人系统,在北京四季青敬老院和上海市第一福利院进行了示范应用,得到了较好的评价。
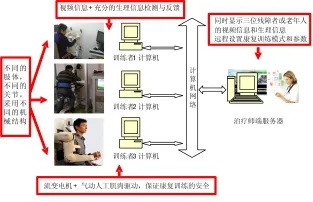
图9 一对三的远程康复训练机器人示范系统
进驻北京四季青敬老院的网络化多老人/残障者远程康复训练机器人系统包括:一台组合式四自由度上肢康复训练机器人、一台外骨骼式多自由度上肢康复训练机器人、一台下肢康复训练机器人和一台智能主/被动训练机器人,如图10所示。

图10 北京四季青敬老院的老人在使用本系统样机
进驻上海市第一福利院的样机包括:一台平衡测试仪和一台智能主被动训练机器人。平衡测试仪通过记录受检者的重心移动情况,完成人体平衡功能的训练和评估;智能主/被动训练机器人可采用不同的放置方法,分别实现人体上、下肢的康复训练,通过检测老人/残障者训练过程中的作用力,可实现主/被动训练模式的切换。图11为上海市第一福利院的老人在使用本系统的机器人进行平衡能力和下肢康复训练。

图11 上海市第一福利院的老人在使用本系统样机
4 系统特色
1)网络化远程康复训练技术:医师和训练者可以通过网络实现远程一对多的康复训练,使社区和家庭康复医疗成为可能。
2)一对多的康复训练模式:实现一名医师同时指导和监控多名老年人进行康复训练,有助于解决我国“训练者多和康复医师少”的矛盾。
3)拟人化的创新结构设计:多种异构式拟人型结构,帮助老年人实现不同部位、不同关节的肢体运动功能训练以及平衡能力训练。
4)安全适用的混合驱动技术:利用被动的磁流变电机和柔性的气动肌肉作为驱动元件,提高训练过程的安全性。
5)渐进式的娱乐互动康复训练:设计友好互动的人机交互训练界面,设置不同的难易等级,提高老年人进行康复训练的主动性。
5 小结
由于我国残障者数目众多、老龄人口逐年增长,对康复训练机器人技术的需求日益迫切。目前,国内的研究基础和对这一领域的了解,与国际相关研究机构的差距并不十分大。
本系统针对目前我国康复医疗领域面临的“康复治疗师少而训练者众多”的突出矛盾,围绕2015年实现 “人人享有康复服务”的国家战略目标,开展网络化多老人远程肢体康复训练机器人系统研究,通过将遥操作机器人技术、计算机网络技术和现代康复医学理论相结合,研制成功网络化多训练者远程康复训练机器人产品样机,并构建临床应用示范系统,实现产品的临床实验和应用,为康复训练机器人的产业化打下了良好的技术基础。
[1]李会军, 宋爱国. 上肢康复训练机器人虚拟环境建模技术[J]. 中国组织工程研究与临床康复, 2007,11(44): 8871-8881.
[2] Zhang Y b, Wang Z X, Ji L H, et al. The Clinical Application of the Upper Extremity Compound Movements Rehabilitation Training Robot[C]. Proceedings of the 2005 IEEE 9th International Conference on Rehabilitation Robotics, Chicago: IEEE, 2005:91-94.
[3] Guo L Y, Ji L H. Relation between patients’active force and effect of robotic therapy for rehabilitation[C]. Proceedings of the 2005 IEEE Engineering in Medicine and Biology 27th Annual Conference, 2005, Shanghai: IEEE, 2005: 5044-5046.
[4]张晓文,杨煜普,许晓,等. 上肢假肢控制模式的信息源研究[J]. 生物医学工程学杂志,2002,19 (4):692-696.
[5] 徐国政.上肢康复机器人自适应控制理论与实验研究[D].南京:东南大学,2010.
[6]张杰. 脑卒中瘫痪下肢外骨骼康复机器人的研究[D].杭州:机械与能源工程学院,2007.
[7]魏丹. 基于Internet的肢体康复训练机器人远程控制系统[D].哈尔滨:机械电子工程学院, 2007.
[8] Li Q L, Wang D Y, Du Z J, et al. EMG Based Control for 5 DOF Upper Limb Rehabilitation Robot System[C]. Proceedings of the 2006 IEEE International Conference on Robotics and Biomimetics, Kunming: IEEE, 2006:1305-1310.
[9]王东岩,李庆玲,杜志江,等. 外骨骼式上肢康复机器人及其控制方法研究[J]. 哈尔滨工程大学学报,2007,28(9): 1008-1013.