活跃思维 创造奇迹
——空军勤务学院中国机器人大赛纪实
2013-02-24喻新尧董晓峰洪志国
喻新尧 董晓峰 洪志国
(空军勤务学院机器人创新实验室,江苏徐州,221000)
活跃思维 创造奇迹
——空军勤务学院中国机器人大赛纪实
喻新尧 董晓峰 洪志国
(空军勤务学院机器人创新实验室,江苏徐州,221000)
今年空军勤务学院代表队组建20个参赛小组,前往安徽合肥参加中国机器人大赛暨RoboCup公开赛(以下简称大赛),共参与3个大项10个小项的角逐。仿人机器人竞速项目,参加了标准赛、障碍赛、创意赛;机器人搬运比赛项目,参加了标准平台组、轮式光电组、车型创意组、人型创意组;双足竞步项目,参加了自由体操、交叉足印、狭窄足印。
从2009年开始组队参加大赛至今,空军勤务学院代表队累计获全国一等奖93项(其中冠军7项、亚军5项、季军7项),二等奖24项,三等奖13项。2012年,大赛在江苏徐州举办,空军勤务学院还作为承办方之一负责组织了大赛的部分赛事。中央电视台新闻频道“朝闻天下”和“新闻直播间”栏目连续三年对我院的比赛情况进行了报道,多地省报进行了独家采访并制作专栏报道。
今年,大赛在安徽合肥建筑大学举行,我院代表队与全国200多所学校2000多支队伍同台竞技,经过紧张激烈的角逐,最终夺得9个一等奖、3个二等奖、3个三等奖的好成绩,其中包括3个冠军、1个亚军和2个季军。

图1 大赛开幕式
一、主要参赛项目
(一)人形组
1.仿人机器人竞速障碍组
规则简述:机器人在8分钟内,沿“400米型”(长3660mm宽2440mm)跑道走完一圈,起点位于第一弯道初始端,途中在第一弯道中间、第一直道中间、第二弯道终点处设有三个高2cm、宽1cm的长方体型障碍。机器人需跨过障碍,中途如若出线、碰到障碍则视为出局,每个机器人有两次机会,最终在最短时间内跨过最多障碍者得胜,其余依次排位。
2.仿人机器人竞速标准组
规则简述:机器人沿“400米型”(长3660mm宽2440mm)跑道走完一圈,时间最短者得胜,其余依次排位。
3.双足竞步机器人自由体操组
规则简述:在3分钟内,完成“挥手,鞠躬,双手俯卧撑,左、右手俯卧撑,前、后滚翻,及左、右侧翻,倒立,劈叉,自由动作”后,由评委统一打分,分高者得胜。
4.机器人搬运比赛人形组
规则简述:机器人搬运比赛要求人形机器人模拟在工业自动化过程中,自动化物流系统的作业过程。机器人在比赛场地内移动,将不同颜色、形状或者材质的料块分类搬运到设定的目标区域。比赛记分根据机器人将物体放置的位置精度和完成时间来决定分值的高低。分高者得胜。
(二)车型光电组
规则简述:5分钟内、把尽可能多的、分三种颜色的物块儿从物料区搬到目标区,成功按要求搬运一个物块儿计10分,若过程中颜色识别错误,搬运一个物块儿则扣10分,小车停止搬运后若能返回出发区额外计10分。分高者得胜。
二、结构创新及技术突破
如何更好地使用传感器一直以来是我们学院重要的研究方向。通过不断的实验探索,我们实现了使用传感器对机器人进行精确的控制,同时弥补了很多结构上的不足,大大简化了以前繁琐的控制程序。这次参赛队员使用完全自主设计和手工制作的机器人参加竞赛,扩展使用了多种传感器。
(一)人形组
仿人竞速比赛要求机器人自由度多,这种结构比较灵活,但缺点是:重量大,增加负荷,重心不易控制,机器人在行走过程中易摔倒。另外,仿人竞速比赛还有一个设计难点:如何实现更科学地巡线,使机器人在提升速度的同时保证巡线质量。
针对上述难题,参赛队就仿人竞速标准组的机器人腿部结构进行了创新,并在技术上优化了单腿巡线的路线方案。图2是优化后的仿人竞速标准组参赛机器人。
1.双足步行机器人运动学分析
机器人动力学主要分析机器人连杆的位置、姿态与关节角度之间的关系,包括两个基本问题:一是己知杆件几何参数和关节变量,求末端执行器相对于绘定坐标系的位置和姿态;二是已知杆件的几何参数和给定的末端执行器摆在总体坐标系的位置和姿态,求关节变量的大小。这即是通常所说的运动学正问题和逆问题。图3表示两种关系的简单框图。

图2 我队仿人竞速标准组参赛机器人

图3 动力学分析流程
其间的主要工作是:将机器人模型简化成多连杆模型,对模型的运动学进行详细分折,应用等价齐次坐标变换矩阵建立双足机器人运动学方程,求解运动学方程,得出各关节变量的表达式,并求出雅可比矩阵和微分运动方程。
2.ZMP理论和双足步行机器人稳定性
由于双足机器人的足底和脚板只是与地面接触而不固定,它们的运动必须满足一个固定条伴,即保持与地面的接触,因此,在研究动力学的时候,我们必须确定机器人的足底面是否保持接触,规划能够保证机器人足底与地面接触的运动模式。为此,我们通常使用ZMP理论。
ZMP是步行机器人研究中的一个重要物理量。1992年,一篇机器人控制的论文中首次定义了零力矩点(zeromoment point,缩写为ZMP)。ZMP是这样描述的:ZMP是地面上的一点,重力和惯性力对这一点的力矩,其水平分量为零。也就是说整个系统对于这个点的前向、侧向的倾翻力矩为零。当双足机构处于动态平衡时,ZMP和脚底所受地面力的反向压力中心CoP(Center of pressure)是重合的。因此,我们可以根据检测到的地面反力信息,计算CoP,通过控制策略调整ZMP和CoP的位置,使二者重和,实现机器人的动态稳定行走。
图4给出了机器人足底所受作用力分布的例子。沿足底分布的负载具有相同的方向,它们等效于一个合力R,其作用点在足底范围内。合力R所通过的在足底上的这个作用点成为零力矩点,简称ZMP。

图4 ZMP示意图
3.理论应用于实践
步行机器人结构十分复杂,构建模型也很复杂,因此需要进行简化处理。为了方便计算,现将机器入作如下假设:
1)机器人的所有质量都集中于质心位置;
2)只考虑机器人的前后和上下二维方向的运动;
3)假设机器人的腿部无质量,它与地面的接触是通过一个可以转动的支点实现的。
通过以上假设,机器人可以视为著名的二维倒立摆模型。我们最终确定了如图5的模型,并参照已有机器人,确定了新式结构。

图5 机器人腿部受力分析模型
将机器人上身看成一个质心,质量为mg,腿长度为L,θ如图5所示,重心处所受合力为N总,其偏重心的过程,可以视为以脚踝为中心上半身刚体的旋转,若要使机器人在这过程中保持稳定,则需其合力矩为零。这里舵机所能提供的扭矩已确定。
对模型受力分析,得

根据函数的性质,函数f(x)=θ与函数f(x)=sinθ,两者为正相关关系,故:
N总=mg*L*sinθ 可变形为 N总/L = mg *sinθ,
因为mg为已知固定量,所以L与sinθ成反比例关系;又因为函数f(x)=θ与函数f(x)=sinθ两者为正相关关系,所以L与θ也成反比例关系,即:L反比于θ。
这样我们就得到了一个关系,机器人的腿长和两脚间间距成反比。
要使机器人走得快,必须满足两个要求:一是步幅要大,二是步频要快。步幅取决于腿的长度,长度越长意味着步幅越大,步频取决于偏中心过程的快慢,偏中心的难易程度取决于两脚间距。
这是一对矛盾,我们必须在长度和间距之间找到一个平衡点。联想人类行走,我们的腿长其实是有一定的收缩空间的,因为人类拥有膝盖这样的机构,来帮助人保持平衡,使腿伸缩,于是我们在机器人的腿部机构中加入了膝盖,使腿长L变成了可变的量,有了一定的伸缩性。

图6 膝盖位置示意图
最终,我们在已有机器人的基础上,开创了12舵机自由度的结构,使得新的机器人可以更好地完成任务。
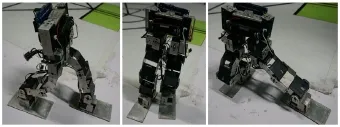
图7 舵机腿部结构样图
4.单脚巡线方案的确定
机器人行走巡线的方式灵活多变,常见的多为双脚夹线巡线,这种巡线方案虽然保险,但机器人完成起来步骤繁杂,执行次数多,动作缓慢。
为了追求更快的速度,我们尝试了多种新的巡线方式,如:巡内线行走,避线行走,阶段性巡线等方法。在尝试过程中,我们遇到了诸多瓶颈,理论上成立的方案,因为各种因素的制约如传感器精度不够、单片机计算能力不足等而无法实现。再三研讨下,我们确定了一种较为保险、快速的巡线方案——单脚避中线巡线方案,巡线示意图如图8所示。

图8 单脚避中线巡线示意图
在图8中,方框代表双脚,红色框代表巡线脚,蓝色点为4个TK_20n传感器,黑、红色箭头为无传感器判断时迈步方向,蓝色箭头为传感器工作时迈步方向。
巡线方案的目标是:在使用尽可能少的传感器的前提下,完成巡线任务。
初始位置,机器人两脚平行于跑道,在无传感器工作时,机器人会按预设程序,向前方行走并小角度的向右偏移;在走过多步之后,传感器将会检测到黑线;不同位置的传感器检测到黑线将会执行不同的程序,例如:图8中1号位置检测到黑线,只需回转一个小角度即可回到跑道位置,若4号检测到黑线,说明机器人脚步已经迈出黑线过多,需要回转一个大角度的步幅,才可回到跑道继续前进。
(二)车型光电组
1.技术改进
车型光电组对以前比赛用机器人的技术改进包括:预判功能,优化的传感器排布方式,多套函数等。
2.制作历程
这次比赛用机器人主要实现对物料的抓取、识别、安放功能,在实验室,我们一直使用的是伺服舵机,整体速度偏慢、减速不太容易控制。
伺服舵机属于数字舵机,主要组成部分为伺服电机,其中包含伺服电机控制电路和减速齿轮。伺服舵机有两个致命缺点:寿命短、易损坏;速度慢、效率低。而直流减速电机恰恰弥补了这两点不足,它靠控制电路来控制电机的转速、通过传感器来控制转动位置。因此,我们决定改用直流减速电机。
由于我们实验室是刚开始接触直流减速电机,所以面临着诸多问题:资料不足,目前市场上能准确控制电机的电路模块价格较高,等等。这些对我们来说是巨大挑战。我们需要解决的难题是如何低成本地准确控制电机,这也可以说是一次动力革命。
车型光电组团队在图书馆里查找资料,发现了一块名叫L298N的芯片,它输出电流大、功率强、最高工作电压为50V、可以驱动感性负载,正符合需要。但是在具体实验时,设计过程却不如大家想象的那么简单。首先,队员要通过资料来制作L298N驱动模块,通过多次不成功的实验,最终大家决定从网上购买一款简单的L298N驱动模块来学习,实现我们对电机的控制。
要做出一辆优秀的机器人搬运车,首先要保证车能够平稳跑起来。实验阶段,队员们配合以前使用的TK-20n来控制制作的试验车,却无法比较平稳地控制电机,最初大家认为是单片机的计算能力不足,但是换了中断测试,结果还是一样。于是,队员们又从软件方面考虑,决定为车增加预判功能,在增加检测距离功能的同时,还增加了传感器的数量来确保小车的稳定性。当电机偏离我们预想的轨迹时,通过TK-20n来“告诉”电机调整一下。
其次,准确控制对物块的检测及抓取。最初,队员们考虑用激光传感器来检测物块。这是因为:激光具有高亮度、高方向性、高单色性、高相干性等特点,激光传感器能实现无接触远距离测量,速度快,精度高,量程大,抗光、抗电子干扰能力强等众多优点,被广泛应用于工业当中。但是在实验过程中队员们却发现,激光传感器的灵敏度太高、反应太快,最终,我们选择了体积较大的漫反射光电开关。
对抓取物块方案的定夺耗费了队员们大量时间。其中有几点难关:第一,小车本身是无法判断方向的,如何保证小车取完物块后能回到应有的路线?第二,物块是堆放在一起的,如何保证抓取物块的同时不将其余的物块推出物料区?第三,小车取到物块存在一定概率,如果第一次取不到物块,如何让小车纠错,实现后续物块的抓取?
物块抓取过程中存在许多问题,这些问题,无论是直接巡线的偶然性,还是通过其他传感器的控制等等,都可以通过程序进行弥补。所以,队员们设计编写了多套函数,并将这些函数制作成一系列可调用的子函数。在遇到相关状况时,小车可以调用函数,自动校正路线,这样省去了诸多麻烦。程序员基于C语言编写出一个很长的程序,罗列了可能出现的种种情况,顺利解决了巡线时的各种难题。
样机试验成功后,大家对小车重新制作、包装,优化了传感器的排列布局方式。
今年参赛用车的制作工艺较往年有很大提升,队员们为了减轻车的重量,用铝板手工制作了车的骨架;为了平衡车体,自制了万向轮;为了准确无误地抓住物块,自制了夹子。
在正式比赛中,小车取得了搬运8个物块的好成绩,是去年搬运数量的两倍,与冠军仅差一个物块。
三、收获感受
一路走来,风雨无阻。参赛队员们在黑暗中摸索,在逆境中前行,经历了太多的艰辛与不易。大家知道,唯有不懈的坚持奋斗与果敢的创新精神,才可能引领我们取得成功。
1.良好的环境才能孕育创新
仿人竞速小组成员魏靖林在与同伴们讨论后,准备按照自己的想法来钻研,教授得知了他的想法,对他说:“虽然通过加舵机增速的想法已经被以前的同学们证实是行不通的,不过没关系,创新就是要有足够的容错率,要有足够的耐心、勇气、毅力来包容错误,只有这样才能在错误中成长,在错误中升华。你爱思考的创新精神值得大家学习,也是一笔宝贵财富啊。”经过教授的提醒与指导,他到处翻论文、搜视频、查书籍,翻阅了大量资料,做了厚厚的一本笔记,终于在摸索和失败中一步步地做出了“十二舵机自由度”结构的机器人。从这件事情上,我们深深地感叹教授当初大胆容错的深谋远虑,也正是教授为队员们营造的创新环境使大家更快地成长起来。所以,没有良好的环境,创新就无从谈起。

图9 机器人搬运小车
2.压力和刺激练就强大的心理素质
康国华和魏靖林去年10月1日才开始被分为一组,搭档制作仿人竞速标准赛机器人,时间本来就十分紧张,而且他们明明知道这是中国矿业大学的强项,还是欣然接受了这项艰巨的任务。几天之后,康国华又临危受命——额外再做一个机器人,此时距比赛开始时间已经不多了,容不得半点耽搁。他加班加点地忙活了两天两夜,终于做出了机器人样机。可是,还面临着一个更为棘手的问题——新舵机没有到位,只能凑合着用从旧机器人身上拆下来的老舵机。在种种困难的夹击下,他庆幸身边还有一帮亲兄弟般的战友,曹鹏飞帮忙修改机器人的动作细节,魏靖林帮着整理接线,喻新尧帮忙设计外观造型,这些点点滴滴让他十分感动。
这个机器人虽然是一个新生儿,却存在太多缺陷,身上的老舵机根本经不起折腾,每调试20分钟左右,就不得不让它休息一会儿。不能进行连续有规律地调试意味着这个机器人要想完成比赛几乎是不可能的,此时教授那句“只要思想不滑坡,方法总比困难多!”给了身陷困境的康国华信心。于是,他坐在实验室旁边的楼梯上,冥思苦想了3个小时,他问自己:既然不能长时间调试,那为什么不把注意力转移到程序的优化上呢?又为什么不先把整套程序的分解程序尽可能地列出来呢?这是不是意味着可以用尽量少的调试次数来取得更佳的效果呢?皇天不负有心人,在他改变了思路后,调试仅仅进行了3次,就完成了预定任务。更为关键的是,新方法使机器人身上舵机的寿命得到了有效延伸,为比赛中取得好成绩奠定了基础。
可是一切并不顺利。当机器人拿到合肥比赛现场调试时,机器人的整个系统几近崩溃,舵机老化带来的问题又一次淋漓尽致地暴露出来,机器人的动作和在学校实验室的时候差别太大,个别电子元器件甚至出现失灵,根本无法正常完成比赛。如果临时更换新的舵机,又无法恢复到原来的调试状态,突发而来的情况如同重磅炸弹几乎将康国华击垮,他整整一个夜晚都被无奈、无助、焦急、郁闷的情绪所笼罩。
时间不等人,比赛就要开始了。康国华告诉自己不能再去顾忌太多,他从头开始,把问题一一找出来,然后逐个击破。队友马培强也帮忙查找电器元件失效的原因。康国华将代码重新整理了一遍,教授得知情况赶过来,安慰他:“不着急,这个机器人坏了没关系,这项任务是你临时接受的,完不成不怪你。”
整整一天一夜,康国华蹲在比赛场地的一角,在原来代码的基础上,进行了更为细致的调整修改,让每个舵机都能适应这个新场地。终于,机器人在比赛前调整好了状态。上午11点,轮到机器人上场了。康国华一脸凝重,他在心中祈符机器人顺利完成比赛。1秒,2秒,3秒……1分43秒!在大家焦急的等待中比赛结束了。这个机器人最终不仅完成了比赛,而且取得了第三名的佳绩!在压力的刺激下,康国华的潜力和整个比赛团队的协作精神被超强地激发出来,同时也练就了整个团队成员过硬的心理素质。
3.不断探索才能创造奇迹
轮式创意组的队员们发现:由于可旋转角度为360°,舵机的惯性、自身误差等原因造成转盘定位不够精确,使物块难以收入或吐出收纳仓,导致整个搬运过程无法完成。因此,如何实现转盘的精确定位成为困扰大家的难题。
为了解决问题,队员们尝试了很多办法。最初大家想在舵机上下功夫,既然转动角度为360°的舵机在运转过程中惯性大,我们何不更换容易控制的180°舵机?如果换180°舵机,又如何让它完成360°的转动?一道道难题摆在大家面前。
通过长时间的讨论,队员们决定使用齿轮配合来控制转盘。由于全部是自主加工,工艺制作水平有限,队员们难以做出相对精密、啮合准确、耐磨损度高的齿轮组,所以,成形的方案对转盘的控制仍未达到预想的结果。
多次试验之后,大家改变了思路,尝试通过外部检测来控制转盘。刚开始,队员们用黑白线传感器检测,即对转盘进行黑白线标识来实现精确控制。但是,由于转盘与传感器的距离过小、转盘速度过快、光照等原因,传感器往往无法检测到黑线。于是,大家又尝试了激光传感器、触点开关等多种传感器,都以失败告终。
在大家束手无策的时候,队员杨伟群突然闪现出一个念头:为什么我们总是要从现有的传感器上下功夫,何不自己制作一个适合比赛车的传感器?!
有了这个新的思路,大家就开始琢磨,四处查阅资料,向历届学长请教。最终,在激烈的讨论中敲定了设计方案。
队员们从身边最简单的工具开始,利用废旧的弹簧及铝片,将连有铝片的弹簧固定在转盘两侧,转盘上也镶有一定长度的铝片,当转盘转到相应位置时,其两侧的弹簧片被连通,通过TTL电平给单片机一个信号,达到转盘的精确控制。
通过这次自制传感器的经历,大家发现:在创新这条路上会遇到无数的困难和挑战,只要不断地探索,不断地改进,不断地提升,就会有所突破,激励大脑放开思路,创造出更多的奇迹。
4.追求和应用知识比知识本身更重要
通过这次大赛,队员们有了很多心得和收获,大家认识到:追求知识的精神、应用知识的方式,比知识本身更重要、更真实。当问题解决不了的时候,要学会换一种角度去思考。在实际问题面前,如果要坚持自己的想法,就必须有仔细分析的科学精神,为想法提供技术支持,不能只凭主观印象判断事物而盲目坚持。
[1]李岩.小型双足步行机器人动力学分析和行走控制[D].合肥:中国科学技术大学,2013.