双足竞走机器人设计
2013-02-24王功孙亚军黄爱芹王志尤在勇
王功 孙亚军 黄爱芹 王志 尤在勇
(1.滨州学院自动化系,山东滨州,256600;2.四川大学机械工程学院,成都,610000)
双足竞走机器人设计
王功1孙亚军1黄爱芹1王志1尤在勇2
(1.滨州学院自动化系,山东滨州,256600;2.四川大学机械工程学院,成都,610000)
0 引言
双足机器人是机器人家族中最重要的成员之一,它涉及仿生学、人工智能、机械创新、计算机仿真学、通信等相关学科,在科研、生产、生活方面的价值都十分突出。双足机器人具有传统的轮式、履带式机器人无法比拟的优越性:传统的轮式、履带式机器人在不平坦的地面工作时,会大大增加能耗,而在松软地面或者严重崎岖不平的地形上行进时,它们又举步维艰,而双足机器人在该类地形上的行走推进有独特的优越性能;双足机器人对环境的适应能力强,不仅可以在狭窄的空间中工作,还能够跨越障碍、上下台阶、甚至在不平整地面上运动:这些优势使其具有广阔的应用前景。
本设计中的竞走机器人是双足机器人中的一种,它没有上身,是双足机器人研究的理想平台,同时也是全国机器人大赛中的一项指定比赛项目,通过本设计所搭建的平台,可以进行双足机器人的机械结构、控制及步态等方面的研究。
1 机械结构设计
1.1 机械结构的设计要求
本课题要求竞走机器人完成模仿人类行走、翻跟斗和自己设计的动作。在进行双足竞走机器人机械结构设计时,应该充分考虑机械结构所需要完成的功能,因此,双足竞走机器人的机械结构的设计需要满足如下要求:
1) 机械结构的对称性,步行运动中普遍存在结构对
本文对双足机器人的机械结构、控制系统、人机交流界面进行了大胆的设计。利用UG NX 6.0进行实体建模,生成零件图,根据零件图人工加工得到零件,将各部分加工零件进行装配,不一样的零件组合实现不同功能的机器人,最后应用C语言编程控制机器人完成各项功能,形成实体的多功能双足竞走机器人。
机器人,双足竞走,实体建模,C语言,PWM称性;
2) 机械结构采用关节结构,能灵活完成前后行走、翻跟斗等运动;
3) 在不多于6个伺服马达的驱动下完成任务;
4) 机械结构简单、精巧、匀称,最大重量不超过1kg;
5) 易于制造,尽量采用通用零件可以降低其成本。
1.2 机械构架的材料选择
根据上述要求,设计机器人所选用的材料应该具有硬度高、质量小、弹性模量大、密度比高等特点,使机器人的重量不大于1kg,而且材料要易于加工、造型,以便可以加工出机械结构要求比较复杂的形状。
经过分析和借鉴比较成熟的机器人对结构材料的选择现况,最终我们确定市面上比较常见的2mm硬质铝板是比较理想的。硬质铝板具有重量轻、弹性大、硬度高等特点,符合本设计的要求,因此选用该材料制作机器人。
1.3 传感器安装位置的选择
因为机器人要求有越障的功能,所以需要安装传感器来检测障碍物。综合考虑各方因素,传感器的安装高度最终选定为20cm;材质选择了重量较轻且硬度较高的碳纤维杆。
1.4 主控制器的位置选择
主控制器的位置选择主要考虑的是要使主控制器与各模块的连接形式最简洁、最可靠,最终选择放置在头顶中间,这样的安装形式能够方便调试,实际运行过程中同样能够方便取下来,减小了机器人调试的难度。
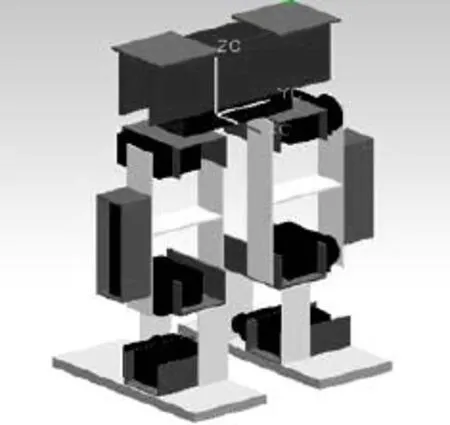
图1 双足竞走机器人模型

图2 双足竞走机器人的实体图
1.5 自由度的配置
在双足竞走机器人自由度的配置过程中,主要考虑的因素是:既要求自由度尽量少,也要求完成的基本运动尽量多;同时,机器人运动要求尽量自然美观。按照设计要求,机器人要完成直线行走及向前、向后翻跟斗等动作,因此需要在每条腿上配置3个自由度。
双足竞走机器人模型如图1所示。
对照人的行走,人体的髋关节虽然有3个自由度,但是本设计只需要控制前向运动,所以髋关节简化为一个前向运动的自由度;膝关节按照运动的要求配置一个前向运动的自由度;踝关节只需要完成侧向运动,因而配置一个控制侧向运动的自由度,保证机器人行走过程中的平衡。
根据以上理论分析,零件装配成实体后如图2所示。
2 硬件系统设计
2.1 电源电路设计
机器人由两节3.7V锂电池串联供电,总电压为7.4V。ATmega16单片机工作电压为5V,光电开关工作电压为6V,舵机需要6V电压。所以,电源管理部分需要将电池电压转换成5V以及6V,为各个模块供电。
本系统采用线性三端稳压芯片LM7805以及DC-DC,其最大的优点是可调电压范围广,缺点是功耗较高。本系统最大的功耗来自驱动舵机;控制器以及传感器部分所需功率较小,采用线性稳压芯片非常适合。电路原理图如图3所示。
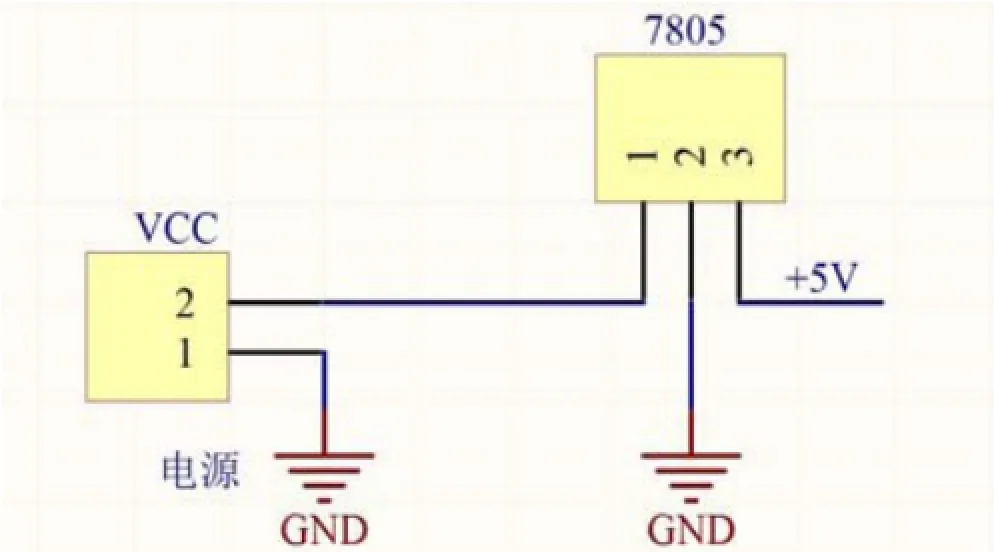
图3 LM7805电路原理图
本设计中,双足机器人动力供给采用的是舵机。该舵机只需供电源和一根信号线,通过单片机发送信号完成调速以及控制机器人完成各种动作。电路原理图如图4所示。
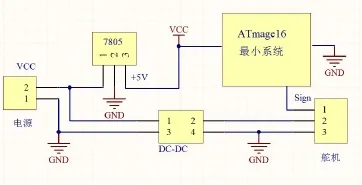
图4 舵机工作电路原理图
3 软件系统设计
双足竞走机器人的控制主要是实现对6个舵机的驱动,故软件设计主要针对舵机驱动部分。
3.1 舵机及其控制介绍
舵机最早应用于航模中,用于调整飞机的飞行姿态。其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms、宽度为1.5ms的基准信号;将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
电压差的正负输出到电机驱动芯片决定电机的正反转。其控制原理是:通过输入周期为20ms(其中高电平为0.5-2.5ms)的脉冲,舵机精度在0°-180°之间转动相应角度。该控制方法具有简单、精度高、成本低、体积小等特点,目前在双足机器人中得到广泛应用。
3.2 分时成组法驱动程序设计
根据舵机的控制原理,单片机需要产生周期为20ms、脉宽为0.5-2.5ms的PWM,具体的设计过程为:将20ms分成200段,每段时间为0.1ms,如果要得到脉宽2ms的PWM,只需要在200段时间中,有连续的20段为高电平就能够实现。具体做法是:用ATmega16单片机定时0.1ms,总共定时200次,连续20次将对应的I/O置成高电平,其余180次置成低电平;反复这样操作就形成了所需要的PWM信号。
产生PWM信号的流程图如图5所示。
4 结束语
双足机器人整个系统的设计涵盖机械、电子等方面知识,只有将各模块设计好,并将各模块组成一个整体,才能完成设计工作。
在设计各个模块的时候,应该注意细节设计以及模块之间的联系和配合。很多设计之间是存在矛盾的,例如,电池位置和整个系统重心高度就是一对矛盾,这就需要在整个系统中对之进行权衡。
本次项目是国家级大学生创新训练项目,项目编号:201210449116。