基于EtherCAT的高性能伺服系统设计与实现
2013-02-22黄守道陈正茂
黄 庆,黄守道,刘 竹,王 辉,潘 鑫,陈正茂
(1.湖南大学,湖南长沙410082;2.中国机械工业联合会,北京100823;3.湖南省电力公司,湖南长沙410300)
0 引 言
伺服控制系统是现代机械系统中关键的执行部件,其性能的优劣很大程度上决定了系统的性能。新一代高性能的伺服系统大都采用永磁同步电机全数字伺服系统。永磁电机伺服系统在电子轴传动印刷机器中的应用是目前伺服系统的顶级应用,电子轴传动就是通过工业以太网控制多台伺服电动机代替机械轴传动,伺服控制器间由高速工业以太网总线连接,通过网络控制软件保证内部的虚拟电子轴对伺服控制系统实时同步控制。电子轴传动在印刷行业具有明显的优势,也有较大的技术难度,因而是目前全球印刷企业的焦点[1]。
永磁交流伺服技术以及基于高速实时控制网络的电子轴技术是研制先进机电一体化设备,如工业机器人、数控机床、印刷设备等的核心技术之一,目前我国电子轴高性能交流永磁伺服系统主要依靠进口,这种状况限制了我国高科技产业的发展。用于运动控制系统的现场总线网络有CANopen、Profibus、PCI、Modbus、SERCOS 和 EtherCAT 等,将工业以太网用于运动控制的主要是SERCOS和Ether-CAT[2]。
本文针对我国高性能装备共性配套需求,研究具有当前国际水平的高性能、实用化和自主知识产权的电子轴传动交流永磁伺服系统,为打破国外的交流伺服系统产品的行业垄断打下了坚实的基础。首先利用自主设计的印刷机械用的伺服电动机作为控制对象搭建实验平台,电机中安装了高端绝对位置值编码器,采用EtherCAT网络作为多轴联动的总线接口,针对实际需求,设计自主研发的控制器和驱动器,运用了自抗扰器作为控制策略。最后通过仿真和实验的验证,该伺服系统在控制电机的实际运行中满足实际的要求。
1 基于EtherCAT高性能伺服系统
1.1 基于EtherCAT多轴联动伺服系统组成
EtherCAT技术突破了所有传统的现场总线和其他的工业以太网技术的瓶颈,实时性能达到了新的性能高度。同时,其灵活的拓扑结构以及更低的研发和使用成本,使其成为目前工业自动化新技术领域的热点。EtherCAT是一种实时全双工工业以太网技术[3],采用主从式结构的高速现场总线。
根据实际需求,本文设计了基于EtherCAT网络的高实时性电子轴传动伺服系统,其结构如图1所示。伺服网络控制系统由控制器和电子轴伺服驱动器建构,能以一主多从模式实时传输控制指令和获取电机状态,从而实现多台电机之间的电子轴实时同步协调控制[4],上位机管理和组织整个控制系统有条不紊地工作,主要包括初始化、程序编译、状态监测和显示等功能,主站接收上位机给定的控制值,并将数据传给从站的运动控制器,而从站控制器主要接收主站的数据或者命令,实现伺服电动机的位置控制,并将伺服电动机的状态传回给主站,以便上位机接收并显示。

图1 基于EtherCAT电子轴传动伺服系统结构图
1.2 基于EtherCAT伺服系统的工作原理
图2是基于EtherCAT网络的多轴伺服运动控制系统框图。主站PC利用EtherCAT网络周期性地给微处理器DSP发送电流、速度、位置等指令,从而控制伺服驱动设备,伺服设备的工作状态信息由检测机构送回DSP,然后通过EtherCAT网络告诉主站,使上位机能够较好地了解伺服系统的运行状态[4]。
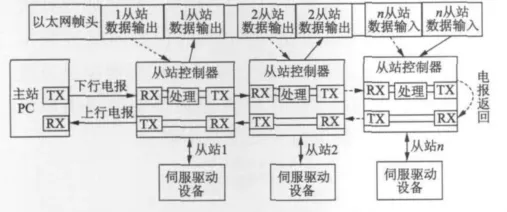
图2 伺服网络控制系统工作原理
1.3 基于EtherCAT伺服系统的结构及硬件设计
本文设计PC机为主站,基于ET1100从站接口控制器和微处理器DSP芯片TMS320F2812为从站的一主多从结构网络,如图3所示。
由图3可知,交流永磁同步伺服系统由控制系统、变频器和电机组成。由于交流永磁同步电机运行时转矩平稳,故在高精度、宽调速范围伺服驱动中,伺服系统被控对象选用交流永磁同步电动机,控制系统一般由位置环构成外环,而速度环和电流环构成内环的控制结构。

图3 EtherCAT电子轴传动伺服控制框图
2 永磁同步电动机的自抗扰控制器
2.1 永磁同步电动机数学模型
三相永磁同步伺服电动机的数学模型是一个多变量、非线性、强耦合系统。本系统采用了三相正弦波电流驱动的凸极式转子永磁同步电动机(SPMSM)为被控对象,Ld=Lq,基于id=0矢量控制策略,可得PMSM的状态方程[5]:

式中:ud是定子d轴电压;uq是定子q轴电压;id是定子d轴电流;iq是定子q轴电流;ψf是转子磁链;Rf是定子绕线电阻;ω是转子角频率;Ld是定子d轴自感;Lq是定子q轴自感;Te是电机的电磁转矩;J是电机的转子转动惯量;TL是电机负载转矩;p是电机的极对数;B是电机的阻力系数[6-8]。
2.2 自抗扰控制器的数学模型
自抗扰控制器(以下简称ADRC)源于非线性PID控制技术发展而来的改进型非线性控制技术[9]。它可施加控制力来抵消各种不确定外扰作用的影响,且依据非线性状态反馈控制率提高系统的控制性能。自抗扰控制器一般由:跟踪微分器TD、非线性状态反馈NLSEF、扩张状态观测器ESO组成[10-11]。本设计中的二阶ADRC离散系统可描述:
跟踪微分器:

式中:θ*为给定的位置值;v1(t)为θ*位置值的跟踪信号;v2(t)为v1(t)跟踪信号的微分信号;h为采样的步长即采样时间;R为系统的速度因子,速度因子越大,跟踪信号的速度就越快[5]。
非线性扩张状态观测器:
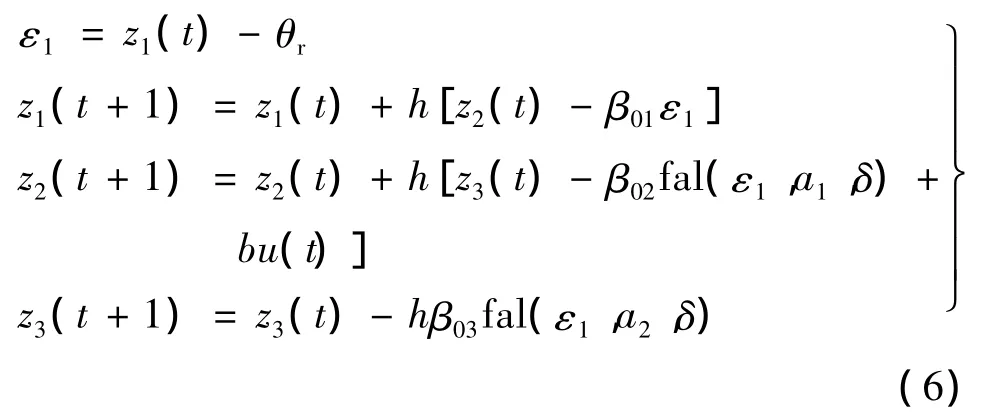
式中:θr是编码器返回值;z1(t)是对θr位置的跟踪值;z2(t)是对z1(t)跟踪值的微分;z3(t)是对系统扰动的跟踪;β01、β02和 β03是输出误差校正增益;ε1是误差值;δ是系统的滤波因子;fal(·)是非线性状态观测器的最优综合控制函数[12],fal(·)的函数式:

式中:a0、a1和a2为非线性因子;e0、e1和 e2分别为积分、误差和微分信号;β0、β1和 β2分别为积分增益、误差增益和微分增益;z3(t)+f0(z1,z2)为位置环a(t)的观测值,且 f0(z1,z2)为系统已知部分;u(t)=Iq为电流给定值。图4为ADRC位置伺服控制器的结构框图。

图4 ADRC位置控制器结构图
2.3 基于自抗扰控制器的位置环控制策略
图5为基于二阶自抗扰控制器的永磁同步电动机位置伺服系统图。图中PMSM位置伺服系统采用双环结构,即位置环和电流环。外环采用了二阶自抗扰控制器,结构中包含了位置环和速度环,内环电流环采用PI调节器。

图5 自抗扰控制的PMSM位置伺服系统结构图
3 仿真及实验结果分析
为验证在EtherCAT网络下,自抗扰控制器的永磁同步电机伺服系统的控制性能,本文利用MATLAB/Simulink对控制系统实现了数字仿真,在与实验条件相同的条件下,以自主研发的EtherCAT变频控制系统为核心实现了两台永磁同步电动机的电子轴联动位置伺服。两台永磁同步电动机参数如表1所示。

表1 两台PMSM参数
给定位置按照0.01sin(4πt)[1-exp(-t3)]规律变化,同时负载按照27sin(4πt)[1-exp(-t3)]变化时,电机位置、转速和系统扰动仿真曲线如图6所示。从图6中可以看出,对电机的位置跟踪效果很好;在起动和稳态时,转速的跟踪曲线都能满足位置伺服系统的要求;自抗扰位置控制器能估测出系统的总扰动,其估测值与实测值基本吻合。

图6 电机位置、速度和系统扰动仿真波形
多轴伺服运动控制系统,主站采用Windows xp系统的PC机,使用TwinCAT软件,通信数据线采用100BASE-TX双绞线运行。利用此控制系统对两台伺服电动机进行控制,位置给定为正弦波,并在0.4 s时,给电机突加额定负载,图7为两台电机通过EtherCAT网络的实时控制,伺服控制器采用自抗扰控制策略下,两台电机的位置以及速度实验波形。由图7可知,此控制系统位置响应速度快,控制精度高,抗扰动性能强,具有良好的控制性能,且Ether-CAT网络能够根据实时情况对位置进行补偿,位置的同步性能较好。
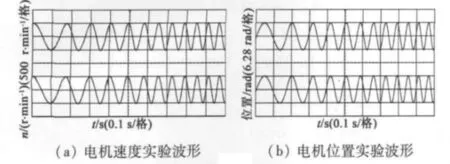
图7 转子位置与速度实验波形
4 结 语
本文根据商业滚筒印刷机械实际需要,将自抗扰器应用于EtherCAT高性能电子轴传动PMSM位置伺服,采用了二阶自抗扰控制器,提高了位置伺服系统的抗扰能力和位置控制精度,并利用非线性状态观测器对扰动的估计,实现了装有海德汉绝对位置值编码器伺服电机的网络化实时控制。通过仿真与实验的验证,基于自抗扰控制器的PMSM位置伺服系统具有良好控制性能,此系统基于EtherCAT网络,由于采用的是位置控制的方式进行,主机能够根据参考从站的实时情况对其它从站进行补偿,所以位置的同步性能很好,不但实现了高性能的电子轴传动,同时伺服电机对负载扰动具有较强的鲁棒性。
[1] 阮倩茹,王辉,施大发,等.基于EtherCAT的高性能交流伺服控制系统设计[J].科技导报,2010,28(1):58-61.
[2] 姜淑忠.交流伺服运动系统的开发[J].中小型电机,2005,32(1):49-52.
[3] 单春荣,刘艳强,郇极.工业以太网现场总线EtherCAT及驱动程序设计[J].制造业自动化,2007,29(11):79-82.
[4] 施大发,王辉,梁骁,等.基于EtherCAT的风力发电机组主控系统设计[J].吉首大学学报,2010,31(5):67-71.
[5] 黄庆,黄守道,匡江传,等.基于模糊自抗扰的PMSM无速度传感器控制[J].湖南大学学报,2012,39(7):37-43.
[6] Oliveira J B,Araujo A D.An indirect variable structure model reference adaptive control applied to the speed control of a threephase induction motor[C]//2004 American Control Conference.AACC,2004:1946-1951.
[7] 孙凯,许镇琳,盖廓,等.基于自抗扰控制器的永磁同步电机位置伺服系统[J].中国电机工程学报,2007,27(15):43-46.
[8] Huang Shoudao,Kuang Jiangchuan,Huang Qing,et al.IPMSM sensorless control based on fuzzy active-disturbance rejection controller for electric vehicle[C]//Power Engineering,Energy and Electrical Drives International Conference.2011:1-6.
[9] 韩京清.从PID技术到“自抗扰控制”技术[J].控制工程,2002,9(3):13-18.
[10] 韩京清.自抗扰控制技术[J].前沿科学,2007,1(1):24-31.
[11] Zhao Chunzhe,Huang Yi.ADRC based input disturbance rejection for minimum-phase plants with unknown orders and/or uncertain relative degrees[J].Journal of Systems Science & Complexity,2002,25(4):625-640.
[12] 刘志刚,李世华.基于永磁同步电机模型辨识与补偿的自抗扰控制器[J].中国电机工程学报,2008,28(24):118-123.
