抑制无功谐波补偿装置中跟踪松弛现象的研究
2013-02-18徐佳伟
王 丞,徐佳伟
(1. 华能南京金陵发电有限公司,江苏 南京210000;2. 华能淮阴发电有限公司,江苏 淮阴223001)
0 引言
随着用户侧非线性负荷的不断增加,电能质量问题变得日益严重。目前抑制谐波、改善电能质量的措施主要分为滤波器、无功谐波补偿。滤波器结构简单,易于实现,成本低廉,但是存在以下缺陷:当低频段、高频段的谐波容量都很大时,体积大,质量大,不利于安装;容易与电网产生谐振而放大谐波等。瞬时无功功率理论的提出,大大促进了无功谐波补偿装置的发展。
无功谐波补偿装置是向网侧注入与谐波电流等幅值、反相位的补偿电流,从而改善电网质量。实际应用中,控制器接收传感器采集的负载侧电流和网侧电压,经过谐波检测算法得到补偿指令电流。补偿指令电流与桥臂电流经过比较得到误差电流,通过滞环控制得到主电路IGBT 的控制脉冲。
无功谐波补偿装置的两大关键技术是谐波检测和电流控制。对于电流控制,目前应用较多的是滞环比较方法以及三角载波线性控制方法。前者可以获得较好的控制性能,精度较高且响应快,但开关频率可能波动很大;而后者开关频率恒定,装置安全性较高,但响应较慢,精度较低。与这两种策略相比,基于电压空间矢量(SVM)的滞环电流控制策略无论是在开关频率还是响应速度方面都有很大优势[1]。
目前研究较多的是网侧电压恒定,负载电流有谐波的情况。但是在实际工业现场,网侧电压可能会在90% ~110%之间波动。当网侧电压升高时,文献[2]提到无功谐波补偿装置所能输出的第N 次补偿谐波电流的峰值将减小,误差电流的最大值升高;当网侧电压降低时,可以考虑在满足补偿精度的前提下降低直流侧电压,进而减小无功谐波补偿装置功率损耗,提高直流侧电压的利用率。文献[3]提到传统算法下误差电流矢量幅值较大时,在误差电流矢量扇区分界面上存在明显跟踪松弛现象。
本文对基于电压空间矢量调制的无功谐波补偿装置中跟踪松弛现象进行了分析,得出了当网侧电压出现波动尤其是升高时出现该现象的原因,并且给出了两种抑制该现象的方法。仿真结果表明,所述方法可以很好地消除跟踪松弛现象。
1 电压空间矢量滞环控制的基本原理
三相电路在abc 坐标系下的状态方程为

式中:Ux为无功谐波补偿装置交流侧相电压;icx为桥臂输出补偿电流;R 为交流侧电阻;L 为并网电感;x=a,b,c。
将IGBT 等效为三组理想开关(Sa,Sb,Sc),8 种开关状态分别对应8 组基本电压空间矢量输出(U0~U7)。由于逆变器交直流侧是隔离的,相间相互影响,一相电流可能会受其他两相开关状态影响[4]。为消除相间影响,引入αβ 静止坐标系。图1 所示为αβ 静止坐标系下8 组基本电压矢量的分布。

图1 双滞环SVM 矢量图Fig.1 Double hysteresis SVM
当输出指令电流为i*c 时,有

忽略线路电阻的影响,根据公式(1)和公式(2),各相可以等效为

式中:u*为参考电压;u 为各相实际输出电压;Δi 为误差电流。
SVM 以误差电流为控制目标,利用8 组基本电压矢量将误差电流维持在设定的区域内,从而满足补偿精度的要求。文献[3,4]引入双滞环控制,内环作用于稳态,降低开关频率减少高次谐波分量;外环作用于暂态,提高电流响应速度,有效限制误差电流,改善滤波器性能。如图1 所示,Iw1和Iw2分别为双滞环的内环和外环。
通过判定参考电压u*与误差电流Δi 的扇区,由逻辑控制器选择输出最优的基本电压矢量。例如,考虑u*位于I 区的情况,如图2 所示:当Δi位于⑥区,U1与u*的合成矢量具有与Δi 相位相反的最小分量(内环),从而控制误差电流的变化;当Δi 位于外环,则输出的基本电压矢量序号与Δi 所在区域一直,从而提高电流响应速度。u*,Δi 位于其他区域时,分析方法类似。具体判定逻辑见表1。
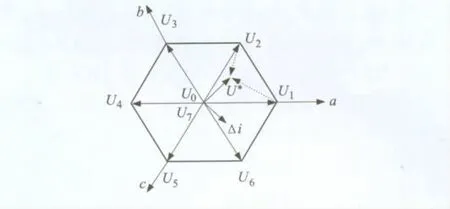
图2 u* 位于I 区的情况Fig.2 Situation of u* in part I

表1 开关模式选择与u* 和Δi 区域的关系Tab.1 Switch mode selection of u* and Δi regional relations
2 跟踪松弛现象分析
2.1 理论分析
首先分析直流侧电压、并网电感值以及网侧电压对无功谐波补偿装置补偿精度的影响。当直流侧电压升高时,无功谐波补偿装置谐波补偿能力增强,误差电流减小,从而提高补偿精度。但是,直流侧电压与功率损耗存在正比例关系。在无功谐波补偿装置功率损耗中,占主要成分的是IGBT 开关损耗和二极管反向恢复损耗,而在开关频率固定、无功谐波补偿装置的输出电流固定的情况下,直流侧电压升高则无功谐波补偿装置的功率损耗增加[2]。所以,一般情况下,应在满足补偿精度的前提下尽量减小直流侧电压,降低功率损耗,提高直流侧电压的利用率。对于并网电感,较大的电感将影响桥臂电流对谐波电流的跟踪能力,无功谐波补偿装置动态性能减弱;较小的电感不利于滤除输出侧开关纹波,系统稳定性变差,同时影响补偿精度。网侧电压一般情况下为恒定值,但是也会在90% ~110%范围内波动。当网侧电压升高时,无功谐波补偿装置能补偿的N 次谐波电流的峰值变小,从而降低了补偿精度。
前面分析了直流侧电压、并网电感值以及网侧电压对无功谐波补偿装置补偿精度的影响,基于这些理论,下面分析跟踪松弛现象产生的具体原因。
当u*位于I 区,Δi 位于②区时,判定逻辑选择输出U2;Δi 位于①区时,判定逻辑选择输出U1。因而,在误差电流扇区分界面上存在开关切换,如果直流侧电压补偿能力不足,将会使误差电流在扇区附近出现不稳定及震荡情况,桥臂电流对谐波电流的跟踪能力减弱,补偿精度下降。输出U2时,其补偿原理见图3。合成电压矢量Δu 的分量Δu'完全作用于误差电流Δi,直流侧电压对误差电流的控制能力取决于Δu'分量。理想情况下,直流侧电压满足补偿精度要求,即误差电流可控。但是,当网侧电压升高时,由上述分析可知,误差电流升高,Δu'分量可能会出现不完全补偿现象,误差电流出现不可控,导致跟踪松弛现象的出现。具体分析步骤如图4 所示。

图3 u* 位于I 区,Δi 位于①区的等效图Fig.3 Equivalent diagram of u* in sec I,Δi in sec ①

图4 并网电感和网侧电压对误差电流的影响Fig.4 Grid-connected inductance and voltage error of current effect
2.2 仿真
以往文献中,当网侧电压取为380 V,直流侧电压一般取为800 V,误差电流完全可控。为了仿真在极端情况下无功谐波补偿装置的补偿性能,本文将网侧电压设定为420 V 来模拟网侧电压出现波动时的情况(网侧电压降低时,补偿精度上升,不会出现跟踪松弛现象),直流侧额定电压取为600 V。
其他仿真参数:时长0.1 s,采样时间5 e ~6 s,滤波电感0.8 mH,负载为三相不可控整流桥,直流侧负载为1 Ω 电阻,内外环分别为10 A,20 A。谐波电流检测算法采用dq0。
仿真结果如图5 所示。其中(a)为误差电流的稳态特性;(b)为在π/2 附近误差电流相角的分布结果;(c)为一个完整周期内误差电流相角的分布; (d)为π/2 附近误差电流的幅值分布结果。

图5 仿真参数:网侧420 V,直流侧600 VFig.5 Simulation results when the grid side voltage is 420 V and the DC side is 600 V
从仿真结果可以看出,在扇区分界面上,误差电流出现跟踪松弛现象,并且在相邻扇区之间进行震荡。每个扇区分界面的波动时间大概持续500 个采样点,并且出现相角最大波动点(A 点)以及峰值最大波动点(C 点)。B 点为跟踪松弛撤出点,此点过后,误差电流移向下一扇区。震荡持续2/3 个周期。
3 抑制方法
通过上述分析可知,跟踪松弛现象可以通过如下方法进行抑制:①改进直流侧电压控制策略,降低峰值最大波动点;②提高桥臂电流对谐波电流的跟踪实时性。下面给出本文的改进方案。
3.1 采用直流侧电容电压给定值调节器
在误差电流扇区分界面上,误差电流在两个扇区之间震荡,并且该震荡占去2/3 个完整周期,所以如果误差电流很大,将有可能出现失控现象。为了消除跟踪松弛现象,可以考虑直流侧电压来提高对误差电流的控制能力。但是,直流侧电压升高将导致IGBT 功率损耗的增加。设计时应考虑功率损耗和补偿精度两方面因素,进行综合优化。文献[1]分析了直流侧电压对补偿精度的影响,并且提出了采用下垂调节器优化直流侧电压控制,其核心原理是在网侧电压出现波动时,对直流侧电压附加一个补偿量。当网侧电压升高时,提高直流侧电压,改善无功谐波补偿装置的补偿精度;当网侧电压降低时,减小直流侧电压,减小IGBT的功率损耗。具体补偿公式如下:

式中:UΔn为补偿量;Udcn为直流侧电压额定值;Usn为网侧相电压额定值;Udc_ref为直流侧电压给定值;Usm为实际网侧电压相电压峰值。
例如:设网侧相电压额定值为220 V,直流侧电压额定值为600 V,网侧电压正向波动10%。经计算,补偿量35 V,实际网侧电压相电压峰值为342 V,直流侧电压给定值为654 V。具体实施框图如图6 所示。
网侧电压采集信号通过直流侧电压给定值调节器,生成补偿量。该补偿量与直流PT 采集信号一起送入PI 调节器,从而生成Δip,送入谐波电流检测环节。
3.2 采用LCL 滤波器
通过上述分析,误差电流在空间矢量扇区分界面上存在较长时间的震荡,导致IGBT 开关状态不断变化,从而增加了交流输出侧的开关谐波。为了抑制输出侧开关谐波以及提高桥臂电流对谐波电流的跟踪实时性,并网滤波电感的参数设计就显得尤为重要。
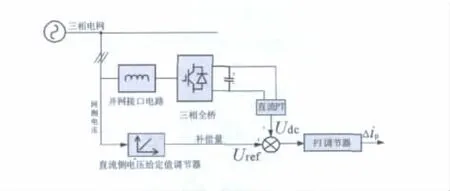
图6 直流侧电压给定值调节器实施框图Fig.6 DC side voltage setpoint regulator implementation block diagram
传统无功谐波补偿装置交流侧一般使用L 滤波器。对L 滤波器而言,需要较高的开关频率才能对开关谐波有效地衰减及获得良好的动态性能。为增强对开关谐波的衰减作用,不得不增大电感值,其缺点是造成系统的成本升高并使系统的动态性能变差[5]。实际应用中,为了减小开关谐波,减少谐波高频分量以及不影响桥臂电流对谐波电流的跟踪实时性,应在满足补偿精度的前提下尽量减小开关频率。LC 以及LCR 滤波器由于电网阻抗的不确定,滤波效果不佳。LCL 能够克服这两个缺点:既可以在较低的开关频率下有良好的滤波性能;同时其滤波性能也不会因为电网阻抗的变化而变化。
LCL 滤波器谐振频率可以通过下式得到:

式中:L1为桥臂侧电感;L2为网侧电感;C 为滤波电容;L1,L2和C 组成3 阶LCL 滤波器;ωn为谐振频率。
LCL 参数设计原则:(1)能够有效抑制高频开关谐波;(2)电感值尽可能小,保证桥臂电流的跟踪实时性。
图7 为完整的系统结构设计图。
控制器采集网侧电压,经过DSP 运算,得到补偿分量,与直流PT 电压信号叠加后送入dq0,经过谐波检测运算后送入电压空间矢量滞环控制模块,生成IGBT 的驱动信号,通过光纤送至主电路IGBT,主电路输出谐波补偿电流,通过LCL 滤波器送入网侧,达到抑制谐波的目的。
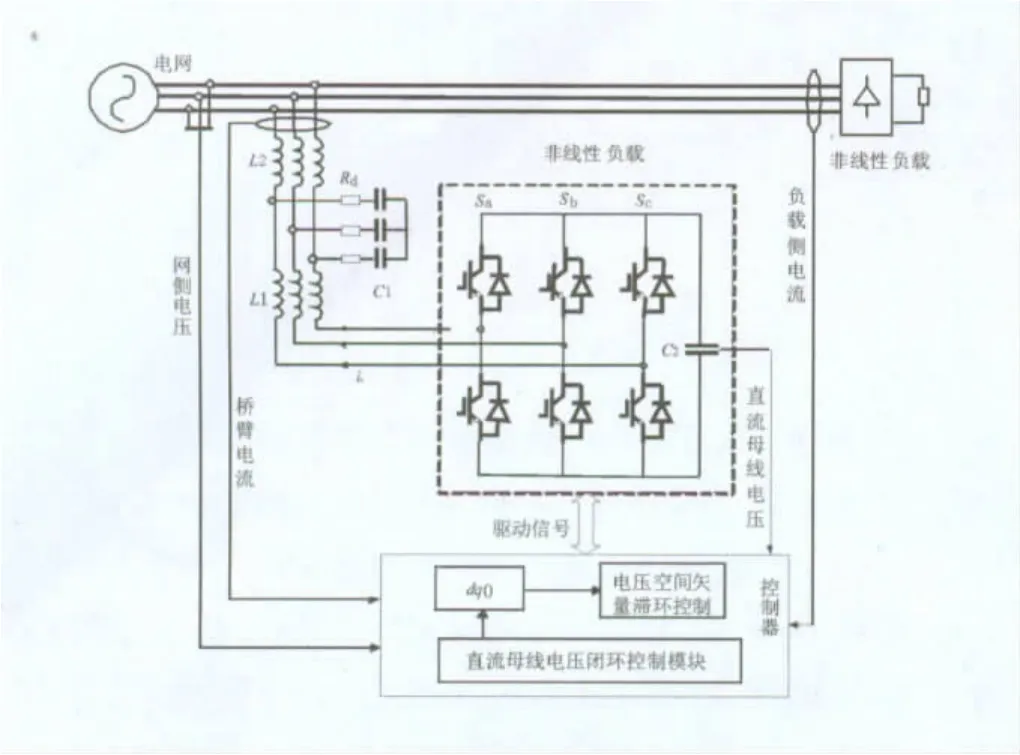
图7 系统结构设计图Fig.7 Structure of the system
3.3 仿真分析
直流侧电压给定值调节器参数:网侧电压为420 V,通过公式(4)计算,直流侧电压设定为654 V (只验证稳态特性,不通过PI 调节器)。LCL 参数:桥臂侧电感L1为0.2 mH,网侧电感L2为0.05 mH,滤波电容C1为36 μF,阻尼电阻Rd为10 Ω,计算得到谐振频率约为4.2 kHz。其他仿真参数:时长为0.1 s,采样时间为5e -6 s,负载为三相不可控整流桥,直流侧负载为1 Ω 电阻。内环10 A;外环20 A。
表2 为改进前后的补偿性能结果,包括最大误差电流以及补偿后网侧电流THD 两方面。可看出当网侧电压未波动前,改进后较之改进前在这两方面有着优势,但不明显。当网侧电压波动后,改进前出现跟踪松弛现象,而改进后这种现象得到有效抑制,出现明显优势。

表2 改进前后的补偿性能结果Tab.2 Compensation performance results before and after improvement
图8 (a)为改进前误差电流的分布;图8(b)为改进后误差电流的分布;可看出,当电网电压波动后,改进前指令电流和装置实际输出电流偏差较大,而改进后两者的偏差很小。图8(c)为改进前后网侧电流的稳态特性,图中,(1)为改进前,(2)为改进后;可看出补偿后网侧电流在改进前,由于指令电流和实际输出电流较大的偏差,网侧电流正弦度不好,其三相矢量图边界并非圆形,而改进后,跟踪松弛现象得到抑制,网侧电流正弦度很好,其三相矢量图边界近乎圆形。图8 (d)为改进后误差电流的稳态特性。可看出改进后的误差电流在三相矢量图上分布均匀,未有较大偏差,没有出现跟踪松弛现象。

图8 改进前后网侧电流、误差电流的稳态特性Fig.8 Steady state characteristics of net side current error before and after improvement
仿真结果表明,改进后网侧电流稳态下呈近似的圆形,说明网侧电流接近标准的正弦波;误差电流基本位于20 A 以内,满足补偿精度的要求,跟踪松弛现象得到了明显的抑制。
4 结论
当网侧电压出现波动,尤其是升高时,直流侧电压将无法完全补偿谐波电流,并且桥臂电流对谐波电流的跟踪实时性变差,反映到稳态特性上,就是在误差电流分界面上出现明显的棱角,即跟踪松弛现象。在此分析的基础上,给出了抑制该现象的两个原则。进而给出了两种改进方案:直流侧电压给定值调节器以及LCL 滤波器。仿真结果表明,基于两种方案的SVM 调制,可以完全抑制跟踪松弛现象,稳态特性比较理想,可以将误差电流限定在外环以内。
[1]肖湘宁.电能质量分析与控制[M].北京:中国电力出版社,2004.
[2]谢斌.并联型有源电力滤波器谐波检测及控制技术研究[D].武汉:华中科技大学,2010.
[3]武健,徐殿国,何娜.并联有源滤波器输出LCL 滤波器研究[J].电力设备自动化,2007,27 (1):17-20,35.Wu Jian,Xu Dianguo,He Na.Parallel active power filter output LCL filters study[J].Electric Power Automation Equipment,2007,27 (1):17-20,35.
[4]陈国柱,吕征宇,钱照明.有源电力滤波器的一般原理及应用[J].中国电机工程学报,2000,20 (9):18-22.Chen Guozhu,Lu Zhengyu,Qian Zhaoming.The general principle of active power filter and its application [J].Proceedings of the CSEE,2000,20 (9):18-22.
[5]王兆安,杨君,刘进军.谐波抑制和无功功率补偿[M].北京:机械工业出版社,1998.
[6]谢少辉,杨淑英.基于瞬时无功功率理论谐波检测方法的研 究[J].电 力 科 学 与 工 程,2010,26 (2):22-24.Xie Shaohui,Yang Shuying.Research on measurement methods for detecting harmonics based on instantaneous reactive power theory [J].Electric Power Science and Engineering,2010,26 (2):22-24.