基于SVPWM 技术的永磁同步电机模糊自适应控制系统研究
2013-02-18刘明基郭韩金舒佳驰
刘明基,郭韩金,舒佳驰
(华北电力大学 电气与电子工程学院,北京102206)
0 引言
永磁同步电机(PMSM)以其转矩脉动小,控制精度高等特点广泛应用于伺服系统中。但传统的速度伺服控制器依赖于控制对象数学模型的精确性,而由于PMSM 存在参数变动、负载干扰等问题,导致其抗干扰能力差,可靠性难以提高,制约了其在高精度伺服场合的应用。
传统PID 是一种线性控制器,控制算法简单,适应性强,具有一定的鲁棒性,能满足一般伺服系统的要求,但由于参数无法改变,因而无法满足实时控制的动态要求。本文利用模糊控制不依赖于被控对象数学模型的特点,设计了一种PI 参数随控制过程变化而自适应的智能控制器并将其应用于电压空间矢量控制系统中。仿真结果表明,该控制系统响应时间短,超调和振荡小,对负载干扰具有较强的鲁棒性[1]。
1 PMSM 模糊自适应电压空间矢量控制
1.1 PMSM 在d-q 轴下数学模型
通常,PMSM 通过Clarke 变换和Park 变换将电机从静止ABC 坐标系变换到转子旋转dq 坐标系。其电压方程为

式中:Rs为定子电阻;p 为微分算子;ω 为电角速度。其磁链方程为
式中:ψf为转子永磁体在定子上的耦合磁链。电机的转矩及运动方程为
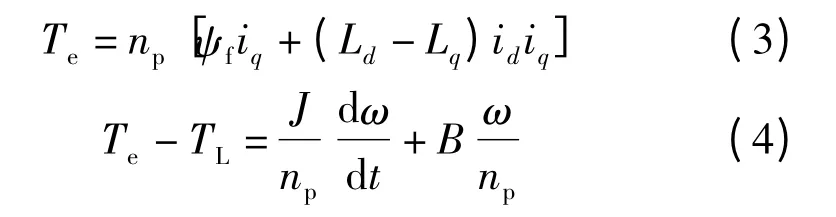
式中:np为电机极对数;TL为电机的负载转矩;J为电机的转动惯量;B 为阻尼系数。
1.2 转速电流双闭环矢量控制系统结构
由图1 可知,与传统PI 速度伺服控制系统相比模糊PI 自适应控制系统也包括两个闭环,外环速度环和内环电流环。并通过速度反馈将速度给定值与实际速度反馈值做差并将差值输入速度环模糊PI 控制器,输出与反馈解耦后的iq做差,其值与d 轴电流差值一起输入相应的电流PI 控制器得到交直轴电压信号值再经过Park 反变换输入到SVPWM 调节器以驱动逆变器对电机供电。

图1 PMSM 模糊PI 控制系统Fig.1 Fuzzy PI control system of PMSM
1.3 模糊PI 自适应控制器
自适应模糊PI 控制器结构如图2 所示。该模糊控制器是以转速误差和误差变化率作为输入,在控制过程中不断对二者进行检测,根据二者的不同状态结合模糊推理规则产生PI 控制器中比例和积分系数的修正值,以对比例和积分系数进行在线调整。
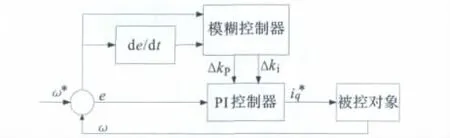
图2 自适应模糊PI 控制器结构Fig.2 Adaptive fuzzy PI controller structure
图3 为模糊控制器的组成,结合知识库主要包括模糊化、模糊推理和清晰化3 个过程。
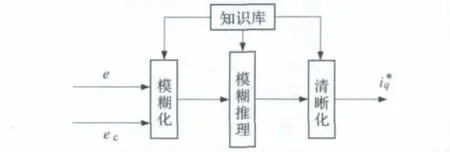
图3 模糊控制器组成Fig.3 Fuzzy controller structure
模糊化的任务是将精确量调整到模糊量。本文模糊控制器有两个输入变量e 和ec分别对应电机的反馈转速与信号值的差值以及该转速差的变化率。e 的量化论域为{-9,-6,-3,0,3,6,9},模糊子集记为{负大,负中,负小,零负,零正,正小,正中,正大}。ec的量化论域为{-6,-3,-1,0,1,3,6},模糊子集记为{负大,负中,负小,零,正小,正中,正大}。两者的隶属度函数分别如图4 和图5 所示。


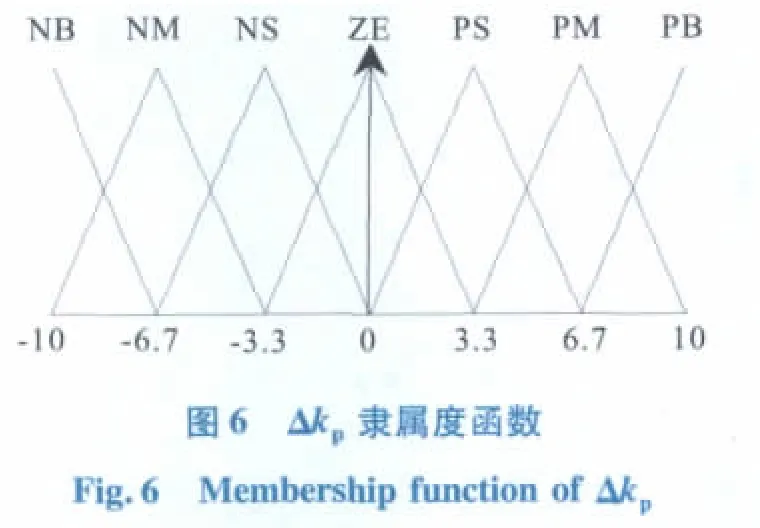
模糊控制器的输出有两个变量,分别为比例系数和积分系数的修正值Δkp和Δki。Δkp的量化论域为{-10,-6.7,-3.3,0,3.3,6.7,10},模糊子集记为{负大,负中,负小,零,正小,正中,正大}。Δki的量化论域为{-10,-5,0,6,11,17,22},模糊子集记为 {负大,负小,零,零正,正小,正中,正大}。两者的隶属度函数分别如图6 和图7 所示[2~5]。

模糊控制规则是模糊推理的核心,也是比例和积分系数调整的依据。实践中,模糊控制规则常常是根据专家知识和经验总结得出的。本文Δkp和Δki的模糊控制规则如表1 和表2 所示。
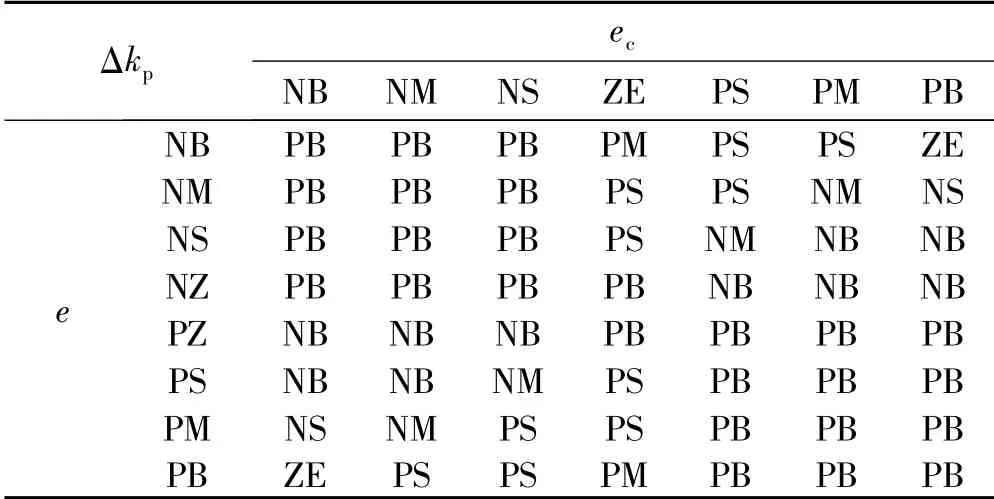
表1 Δkp 模糊控制规则Tab.1 Fuzzy control rules of Δkp

表2 Δki模糊控制规则Tab.2 Fuzzy control rules of Δki
模糊控制器的运算过程基于模糊变量,而后续输入变量必须为清晰量,因此与模糊化过程相反,将模糊变量转化为清晰量的过程就是清晰化。本文中清晰化过程采用面积重心法,并结合比例因子得到最终输出量,如式(5)所示。

式中:kuω为比例因子;z 为输出模糊量取值;μc(z)为相应的隶属度[6]。
2 控制系统仿真结果及分析
为验证本文所设计模糊控制器的合理性。利用Matlab/Simulink 建立了PMSM 的控制系统模型。分别对传统PI 和模糊PI 控制算法分别进行了仿真。电机额定转速起动波形如图8,9 所示。


从图8,9 中可以看出,传统PI 控制器由于其比例系数和积分系数不可调,故由于起动一开始的积分累加效应导致转速波形有较大的超调;同时,PMSM 是一个时滞环节,系统在接近同步转速时引起较频繁的振荡。而模糊控制器根据专家经验规则,参考电机不同的运行状态,实时对PI 控制器参数进行调整,使电机在刚起动时转速上升更快,这点在转矩波形上也得到反应,转矩更快接近峰值转矩;当电机接近同步转速时,能有效地减弱转速上升加速度,更平稳地牵入同步运行状态而系统无超调和振荡。
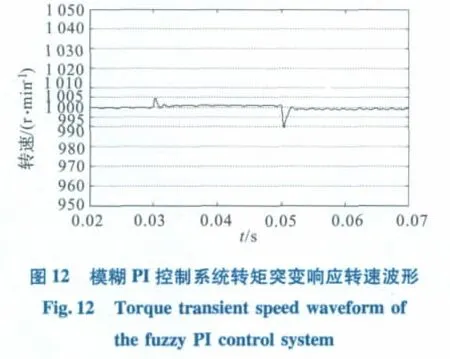
令电机进入稳态运行0.035 s 时转速由1 000 r/min 突变到1 200 r/min;并在0.045 s 时又突变到800 r/min。转速波形如图10 ~图12 所示。

图10 转速信号突变系统跟踪响应Fig.10 System tracking response under speed signal mutation
由图10 可知,当电机处于稳态运行时转速信号突加变化,传统PI 控制系统的转速响应存在剧烈的超调和振荡,过渡时间较长,尤其是转速信号下降时更为明显。而模糊PI 控制系统能够稳定地跟踪信号值,且无超调和振荡,过渡时间短,动态性能明显优于传统PI 控制。
同时,为验证系统应对负载转矩突变的响应能力。当电机稳态运行至0.03 s 时转矩突变为0;当0.05 s 时,转矩又上升为4 N·m,两种控制系统的转速波形如图11 和图12 所示。
从图11 和图12 可以看出,和转速信号突变类似,当负载转矩值出现突变时,模糊系统的转速上升或跌落的幅值均要小于传统PI 控制系统,且无振荡,系统过渡时间较短,稳态精度也较高。

3 结论
本文所设计的模糊PI 控制器具有不依赖于控制对象数学模型的特点,相比较于传统PI 控制器具有动态响应快、超调小、无振荡等优点,具有良好的自适应性和鲁棒性。仿真结果与理论分析一致,证明了该控制系统的优越性。
[1]丁文双,胡育文,鲁文其,等.永磁同步电机模糊PID参数自整定[J].微特电机,2011,39 (5):17-21.Ding Wenshuang,Hu Yuwen,Lu Wenqi,et al.Fuzzy PID parameters self-tuning of permanent magnet synchronous motor[J].Micro Motor,2011,39 (5):17-21.
[2]Kamel H M,Hasanien H M,Ibrahim H EA.Speed control of permanent magnet synchronous motor using fuzzy logic controller [C].Miami USA:2009 IEEE International Electric Machines and Drives Conference,2009.1587-1591.
[3]袁登科,陶生桂.交流永磁电机变频调速系统[M].北京:机械工业出版社,2011.
[4]王桂荣,李太峰.基于SVPWM 的PMSM 矢量控制系统的建模与仿真[J].大电机技术,2012,(2):9-12.Wang Guirong,Li Taifeng.Modeling and simulation of the PMSM vector control system based on SVPWM[J].Large Electric Machine and Hydraulic Turbine,2012,(2):9-12.
[5]魏亮,王艾萌,李和明.电动机车驱动永磁同步电机设计和控制的研究[J].电力科学与工程,2009,25(6):29-33.Wei Liang,Wang Aimeng,Li Heming.Design and control of interior permanent magnet motor drives [J].Electric Power Science and Engineering,2009,25 (6):29-33.
[6]何继爱,王惠琴.永磁同步电机空间矢量控制系统的仿真[J].电力系统及其自动化学报,2005,17 (6):14-16,38.He Jiai,Wang Huiqin.Simulation of permanent magnet synchronous motor vector control system[J].Proceedings of the CSU-EPSA,2005,17 (6):14-16,38.
[7]关晓强.基于模糊控制的永磁同步电机伺服系统研究[D].大连:大连理工大学,2008.