基于SURF特征点UCAV环境感知
2013-02-13吴德伟邰能建
周 阳,吴德伟,邰能建,杜 佳
(空军工程大学 信息与导航学院,陕西 西安710077)
责任编辑:任健男
认知导航系统(Unmanned Combat Aerial Vehicles,UCAV)[1]能从当前环境中提取合适的特征以描述UCAV当前所在环境的局部特征,计算出所对应的空间3D坐标等几何信息,并以此作为环境自然路标,实现全局定位与环境认知地图的创建。可见环境感知是UCAV实现认知导航的一个重要环节。
UCAV不同于人,其环境感知难以体现智能性。然而环境感知的关键在于对环境的描述,也就是说,当UCAV具有很好的描述能力时,也就具备了一定环境感知能力。通常环境信息可通过视觉获取,其直观表示便是图像,因此以图像信息表征环境信息成为了环境感知一种形式,对图像的描述能力间接体现了环境感知能力。然而UCAV高机动性及所处环境复杂性,带来图像尺度、旋转甚至仿射变化,使得环境感知更加困难,特征点提取方法的出现为克服这种困难提供了思路。
本文首先分析了几种特征点检测方法,然后以SURF算法为重点,分析了基于该算法的特征点提取原理,最后仿真验证了SURF算法提取特征点鲁棒性,并以此作为UCAV环境感知的依据,较好解决UCAV以图像作为环境感知信息时多变性问题。
1 特征点检测方法分析
特征点检测目的在于找到图像中对平移、旋转、尺度不变性的特征点,通过局部不变性的分析达到识别图像的目的。常用的特征点检测方法有Harris算法[2]、SIFT算法[3]和SURF算法[4]。
Harris特征点检测算法对图像的平移、旋转和噪声都具有很强的稳定性,但不具有尺度不变性,因而无法直接应用于尺度不变特征的定位处理[5],无法满足UCAV认知导航环境感知中特征点提取多尺度要求。SIFT算法是Lowe在LOG算子[6]基础上提出的,其具有较好的抗旋转、平移、尺度变化和噪声污染能力,但该算法计算复杂度高、匹配速度慢,不具有实时性要求[7]。SURF算法是Bay提出的基于积分图像的快速Hessian算子三维极值点搜索尺度不变特征定位方法,其具有SIFT算法提取特征点的鲁棒性,且有效克服了SIFT算法实时性差的缺点,而且在克服尺度变化影响方面优于Harris算法[8],较好运用在景象匹配辅助导航[9]、智能车辆交通信号检测识别[10]、目标姿态估算[11]等方面,更适合于UCAV认知导航环境感知中特征点检测。
2 基于SURF算法的特征点检测
SURF算法实现核心是引入了积分图像,并将高斯二阶微分模板进行了转换,采用Haar小波响应获取特征点的主方向及特征描述矢量。该算法大大缩短了图像特征点的提取时间,同时提取的特征点具有旋转和尺度不变性,以满足图像特征点匹配的要求。
2.1 特征点检测
特征点检测时首先需要积分图像,然后将高斯二阶微分模板替换为盒子滤波器,图像的卷积转换成盒子滤波运算,以此检测特征点。同时通过不断扩大的盒子滤波器尺寸来求取积分图像滤波响应,以此建立尺度金字塔。
积分图像由Viola和Jones[12]提出,图像中任意一点p=(i,j)的积分值II(i,j)为原图像原点到P点相应的对角线区域灰度值总和

给定图像I中一点p=(i,j),在点P处,尺度为σ的Hessian矩阵H(p,σ)定义为

式中:Lxx(p,σ)为高斯二阶微分在点P处与图像I的卷积。Lxy(p,σ),Lyy(p,σ)以此类推。Hessain矩阵的行列式为

SURF算法进行特征点检测时需简化模板,对于σ=1.2的高斯二阶微分模板,设定模板的尺寸为9×9,并将白色区域的值设为1,灰色区域设为0,黑色区域设为-2。模板简化前后如图1所示。
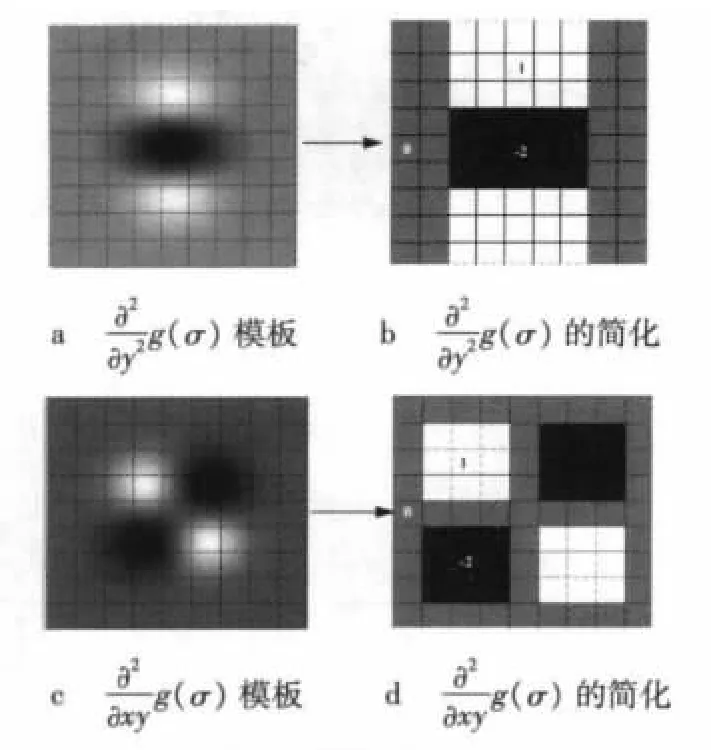
图1 模板对比图
设对应简化后模板对图像进行卷积的结果为Dxx,Dyy和Dxy。由此对Hessian矩阵行列式进行简化可得

不同大小的盒子滤波器和原图像进行卷积就可得到尺度图像金字塔。本文特征点检测时设置了5组滤波器尺寸。其中前3组尺寸如图2所示。
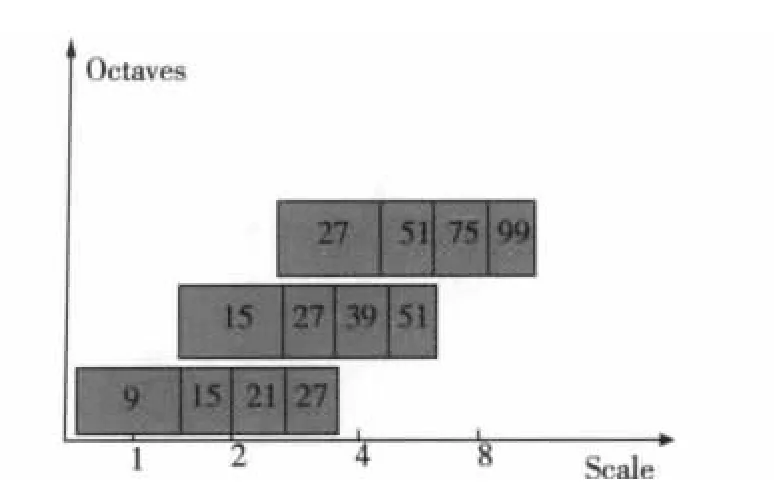
图2 滤波器尺寸图形化表示
由此,将空间每个点在相邻位置和相邻尺度上的Hessian响应值(共26个)进行比较,极值点即为检测到的特征点,其对应的位置和尺度即为特征点位置和尺度。
2.2 确定特征点主方向
确定特征点主方向时,首先以特征点为中心,以6s(s为特征点的尺度)为半径的圆形区域内在x和y方向进行Haar小波响应运算。然后使用σ=2s的高斯加权函数对Haar小波响应进行高斯加权。最后用60°的扇形窗口在以特征点为圆心的区域内以固定步长进行滑动,求取滑动窗口内x和y方向Haar小波响应累加值,特征点主方向即为最大值所对应的方向,如图3所示。
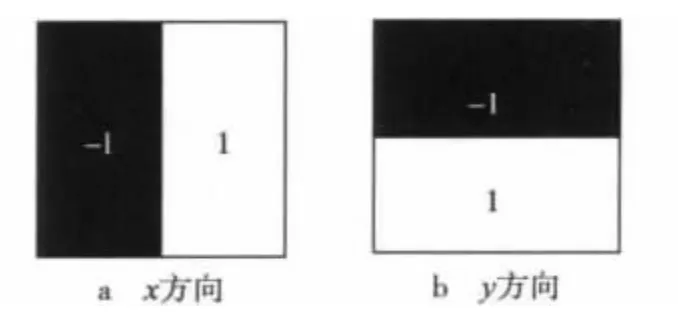
图3 Haar小波x方向和y方向响应模板
2.3 生成特征描述矢量
生成特征描述矢量时首先以特征点为中心沿主方向将20s×20s的图像划分成4×4个子块,然后用尺寸为2s的Haar模板求取每个子块响应值,并对响应值∑dx,∑|dx|,∑dy,∑|dy|进行统计,生成特征描述矢量。由于对每个特征点进行描述时有4×4个子块,而每个子块用4维向量表示,因此生成的特征点特征矢量共有64维。
在完成以上3个步骤后,即可获得图像的特征点,同时给出每个特征点的位置、尺度、主方向和描述矢量的信息。图4给出了图像中检测到的特征点。图像大小为306×306,共检测到516个特征点。
2.4 特征点匹配
特征点匹配时需要充分利用待匹配图中的特征点描述矢量间关系,如果提取的两个特征点描述矢量间距离很小,则表示这两个特征点在对应场景同一位置的可能性很大;反之,若描述矢量间距离很大,则在对应场景同一位置的可能性很小。

图4 图像中检测到的特征点
3 仿真验证及结果分析
仿真图像大小为306×306,首先用SURF算法检测待匹配两幅图像的特征点,然后采用最近距离法进行特征点粗匹配,最后通过最近和次近距离比值法提纯匹配对(阈值为0.65)。具体分析内容有SURF特征点抗噪声性分析,SURF特征点抗旋转性分析,SURF特征点抗尺度变化性分析。性能指标为匹配分数和错误率。
匹配分数定义为两幅图像特征点之间正确匹配对的数量与两幅图像中检测到的较少特征点数量之比。错误率表示提纯后特征点错误匹配对数量与提纯后总匹配对总数量之比。
3.1 抗噪声性分析
表1给出了图像受不同强度噪声干扰时特征点检测与匹配情况。选取噪声为零均值高斯噪声,在相同条件下做了20组实验,取平均值进行性能分析。

表1 高斯噪声下特征点检测匹配情况
由表可知:不同噪声强度下检测到的特征点数与匹配分数不同;随噪声方差增加,匹配分数逐级减小,且噪声小时匹配分数很高(方差为0.01时匹配分数高达40.12%);各个噪声下匹配对错误率均在5%以下;当噪声方差超过0.06时匹配分数低于10%,图像基本无法识别。
可见,SURF算法检测到的特征点有一定的抗噪声能力,当UCAV的感知图像受到弱噪声干扰时,可以通过特征点提取来识别图像,实现环境感知。高斯噪声下特征点匹配图如图5所示。
3.2 抗旋转性分析
表2给出了目标图像旋转不同角度时特征点检测与匹配情况。
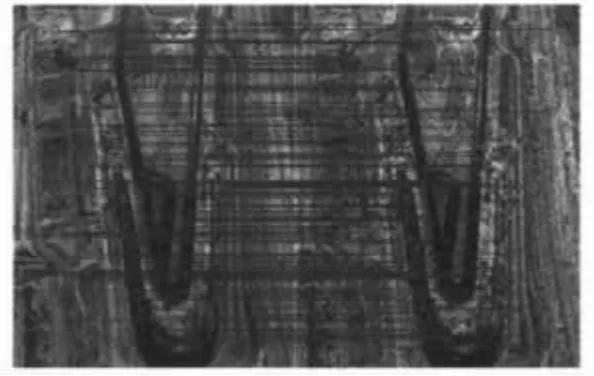
图5 高斯噪声下特征点匹配图
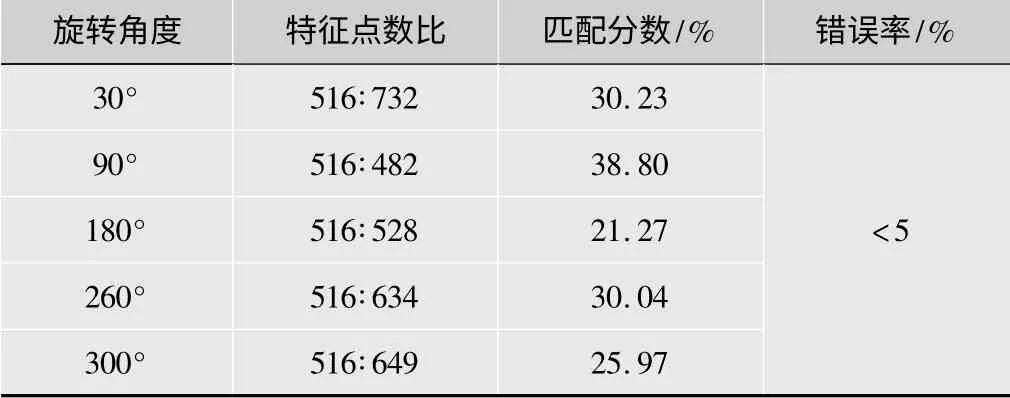
表2 不同旋转角度下特征点检测与匹配情况
由表可知:同一场景在不同旋转角度下检测到的特征点数是有差别的;各个旋转角度下均有较高的匹配分数和较低的错误率。
可见,SURF算法提取特征点具有良好的抗旋转能力。当UCAV感知图像发生任何角度旋转,都能通过提取特征点达到识别图像感知环境的目的。
图6是目标图像相对基准图像旋转180°时特征点匹配图。

图6 图像旋转180°特征点匹配图
3.3 抗尺度变化性分析
表3给出了图像发生尺度变化时特征点检测与匹配情况。

表3 尺度变化下特征点检测与匹配情况
由表可知:不同缩放比例下检测到特征数量差别很大,但采用比值法提纯匹配后能获得较高的匹配分数,均超过45%;各缩放尺度下特征点匹配对错误率均低于3%。图像缩小0.5时的特征点匹配图如图7所示。

图7 图像缩小0.5时的特征点匹配图
可见,SURF算法提取特征点能有效克服图像尺度变化,当UCAV获得感知图像在尺度上发生变化时均能通过特征点提取来感知环境。
4 结束语
本文将SURF特征点检测与匹配引入到UCAV环境感知中。实验结果表明SURF算法提取特征点具有较好的鲁棒性,能有效解决UCAV以图像作为环境感知信息时遇到的图像污染、旋转和尺度变化等问题,为UCAV较好地实现环境感知提供了有效的方法。
[1]吴德伟,邰能建,戚君宜.基于认知理论的UCAV智能导航研究新进展[J].空军工程大学学报:自然科学版,2011,12(4):52-57.
[2]HARRIS C,STEPHENS M.A combined corner and edge detector[EB/OL].[2012-11-20].http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.231.1604.
[3]LOWE D G.Object recognition from local scale-invariant feature[C]//Proc.IEEE International Conference of Computer Vision.Kerkyra,Greece:IEEE Press,1999:1150-1157.
[4]BAY H,TUVTELLARS T,GOOL L V.SURF:speeded up robust feature[C]//Proc.the European Conference on Computer Vision.Graz,Austria:University of Liubljanna,2006:404-417.
[5]王广学,黄晓涛,周智敏.SAR图像尺度不变特征提取方法研究[J].中国图象图形学报,2011,12(12):2199-2250.
[6]LINDEBERG T.Feature detection with automatic scale selection[J].International Journal of Computer Vision,1998,30(2):79-116.
[7]朱英宏,李俊山,郭莉莎,等.基于LBP的瓷都不变特征的描述和匹配算法[J].计算机辅助设计与图形学报,2011,10(10):1758-1763.
[8]郑玉龙.复杂环境下尺度不变特征点检测与匹配技术研究[J].科学技术与工程,2011,11(23):5693-5701.
[9]王先敏,增庆化,熊智,等.结合惯性导航特性的快速景象匹配算法[J].系统工程与电子技术,2011,9(9):2055-2059.
[10]CHEN Long,LI Qingquan,LI Ming,et al.Traffic sign detection and recognition for intelligent vehicle[C]//Proc.IEEE Intelligent Vehicles Symposium.[S.l.]:IEEE Press,2011:908-913.
[11]SONG Kaitai,CHANG Chehao.Objiect pose estimation for grasping based on robust center point detection[C]//Proc.Asian Control Conference.[S.l.]:IEEE Press,2011:305-310.
[12]VIOLA P,JONES M.Rapid objiect detection using a boosted cascade of simple feature[C]//Proc.IEEE Conference on Computer Vision and Pattern Recognition.[S.l.]:IEEE Press,2001:1511-1518.
