交通冲突技术检测与判定研究现状综述
2013-01-31王玉全胡小平
王玉全 胡小平
北方工业大学机电工程学院自动化系,北京市 100144
交通冲突技术检测与判定研究现状综述
王玉全 胡小平
北方工业大学机电工程学院自动化系,北京市 100144
分析交通冲突技术国内外研究现状,从交通冲突技术的概念出发,分别阐述传统交通冲突技术观测方法、冲突判定规则及在道路交通安全评价中的应用,总结传统的冲突观测方法和冲突判定规则的局限性,并将其与基于视频处理技术的交通冲突技术研究进行比较,分析基于视频的冲突技术研究的可行性,最后为交叉口交通冲突技术的发展提出一些浅见。
交通冲突技术;视频处理;道路交通安全评价
引言
道路交通安全评价是道路交通安全研究的一项重要内容。传统的交通安全评价方法依赖交通事故的统计,由于交通事故统计的不完善,直接影响了交通安全评价的可信度水平。国内外大量学者的研究[1,2]已表明:事故与冲突虽然有差异,但是他们具有线性特征且呈现一定的规律性,也就是说冲突对事故具有可替换性。因此,交通冲突技术作为一种非事故统计的交通安全间接评价方法,拥有着大样本、快速、定量研究的特点,备受大家的关注。
交通冲突技术不但起步较晚,发展也十分缓慢,总结国内外交通冲突的现状,突出的问题是交通冲突识别与判定的方法遇到了瓶颈。冲突的发生也是转瞬即逝的过程,不易捕捉[3];对交叉口交通冲突对象的研究,已深入到不同的交通行为者之间,观测更加困难[4,5]。
因此,创造一种便捷,迅速,准确,高效的交通冲突识别手段,进而研究一种与之相应的交通冲突判定方法,将成为交通冲突技术研究的重点。
1 交通冲突的概念
1997年我国学者对交通冲突的第一次定义[6]:在道路交通安全评价中,交通冲突是在可观测条件下,两个或两个以上道路使用者在同一时间,空间上相互接近,如果其中一方采取非正常交通行为,如转换方向、改变车速、突然停车、交通违章等,除非另一方也相应采取避险行为,否则,会处于碰撞的境地,这一现象就是交通冲突。因此,交通冲突与交通事故有着相同的开始与过程,区别在于是否造成损害性结果。
2 传统的交通冲突观测方法
传统冲突观测法主要包括人工现场观测法和录像观测法两种[7]。
2.1 人工现场观测
人工现场观测要求对观测人员进行专业的培训,以提高记录可靠性。美国联邦交通部出版的《交通冲突技术安全运行用户手册》[8]中按照人工现场观测的特点将交叉口交通冲突划分为14种冲突类型。
并描述了交叉口交通冲突发生的4个阶段:
第一阶段,第一车辆首先发生行为;比如,从横向车道驶出。
第二阶段,第二车辆由此处于可能碰撞的危险境地。
第三阶段,第二车辆的驾驶人员采取刹车或者改换车道等反应行为。
第四阶段,第二车辆继续行驶安全通过相互作用区域。
规定人工观测到上述4个阶段发生时,记录一次交通冲突。该观测方法受到现场观测条件的限制,以及对现场观测员较高的素质要求,很难控制观测准确度;此外由于观测时长的要求,造成人力成本过高。
2.2 录像观测法
录像观测法是指对观测路口进行录像后,分析人员对录像资料进行反复观看,并通过与同组人员的讨论对冲突发生、冲突严重性进行确定[9]。该方法解决了人工现场观测对环境和观测人员的严格要求,但并没有从根本上解决冲突观测数据精度和观测效率。因此,传统的冲突观测方法限制了交通冲突技术的进一步发展和应用。
2.3 基于视频的交通冲突数据采集
鉴于传统观测方式的局限性,随着计算机视觉图像处理技术大量应用于交通数据采集和监控中,通过视频采集数据来检测交通冲突的方法,逐渐受到国内外学者的关注。
2004年S. Atev和O. Masoud等采用多个摄像机视频序列图像进行数据融合,更好地展示目标的运动特征和车辆之间的相互作用[10]。2005年Messelodi和Modena提出交叉口车辆碰撞概率的计算方法,该方法也是基于视频自动采集的大量微观交通数据[11]。2008年张方方等对视频数据信息中进行处理提取冲突车辆的运动轨迹、速度、加速度等微观交通参数,实现交通冲突微观参数采集,根据车辆的轨迹、速度和加速度曲线对车辆的运行特征做出分析,初步实现简单交通条件下机动车交通冲突视频自动检测[12]。
总的来说,各国学者对视频检测车辆的研究也为交通冲突自检测提供了可发展的平台[13,14,15],因此,视频数据采集取代人工观测趋势明显。
3 交通冲突判定规则
3.1 交通冲突严重程度划分
有学者研究表明[16]:事故与冲突的关系可用冲突的严重性程度进行描述。根据交通危险事件的严重性又可具体分为无干扰通过、非严重冲突、严重冲突和事故,其数量关系呈塔形分布,如下图1。

图1 车辆之间交通事件塔形分布图
传统的非严重冲突和严重冲突主要按其特征描述进行划分[17]:当交通行为者遇到其他交通行为者的逼近,需要采取避险行为才能避免事故的发生时,非严重冲突的主要特征是,交通行为者感知到一定的压力,存在较为充分的时间进行预判,严重冲突的主要特征是,交通行为者感知到相当大的心理压力,必须采取迅速有效的紧急避险行为,动作剧烈,预判时间紧迫。
道路安全评价的研究在于确定严重冲突与事故的定量关系,交通冲突研究的关键在于判定是否为严重冲突。由于没有硬件技术的支持,人工观测冲突依据汽车制动灯的显示判断,对严重程度的区分存在很大的主观性。这也是传统观测限制交通冲突技术发展的重要原因之一。
3.2 交通冲突判定规则
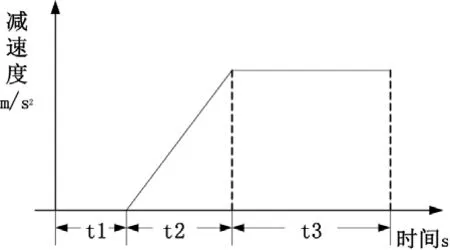
图2 汽车制动过程
如今的交通冲突判定规则主要基于汽车制动的距离、速度、时间来制定[18,19],但是由于传统冲突观测条件限制导致判别时常用其中一项参数作为判别标准。
上图2为汽车制动过程图解。
t1——制动力操作反应的时间;
t3——制动力增长时间;
t4——制动力达到最大值后的持续制动时间。
其中,t1内汽车驶过的距离为:
S1=vtt1
t2内汽车驶过的距离为:
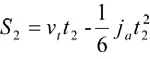
t3内汽车驶过的距离为:
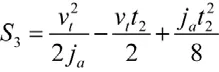
其中ja是汽车制动的最大加速度,vt是汽车制动前的瞬时速度。而冲突观测只能在制动力产生作用时进行,因此,冲突判定下汽车制动距离为:

根据国标GB7258-87,车辆制动系统制动力增长时间t及最大制动减速度,由车辆的制动过程可以得到冲突发生时车辆速度分别与最大制动距离和制动时间之间的关系如下表所示:
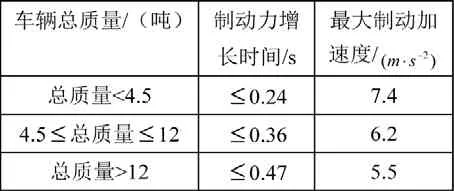
表1 不同质量下车辆制动时长及最大制动减速度的关系
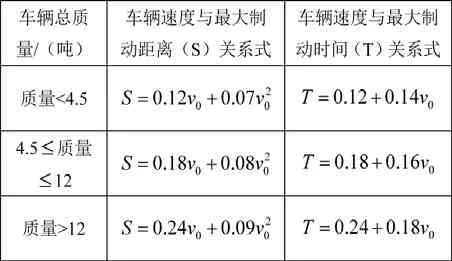
表2 不同质量下车辆速度与制动距离及最大制动时长的关系
因此通过设定各种车辆不同速度下最大制动距离S来判断冲突的发生。若观测到车辆有异常行为时,车辆间的距离大于最大,则认为是非严重冲突,若车辆间的距离小于临界距离则认为是严重冲突。以最大制动距离S作为判别冲突的方法称为空间距离法。
由车辆的制动过程,同样可以得到各种车辆在不同速度下距离发生事故点的所需要的最大制动时间T。若这个时间小于最大制动时间T,则视为发生严重冲突,美国公路研究所提出严重冲突临界值为1s,瑞典是1.5s。
上述两种方法缺点是对于交叉口转弯过程中车辆冲突的识别不够完善。
能量判别法[20],该方法将车辆转化为一个质点,根据物理学中能量守恒定律理论,以通过计算冲突质点采取避险行为时所产生的碰撞能量的大小来衡量冲突。
该方法引用汽车碰撞理论——一起碰撞事故的能量消耗越大,事故的严重危险性(ROC)也越大,对交通冲突的ROC进行分析。定义衡量冲突危险性的重要指标,冲突能量:冲突车辆在采取避险行为生效的瞬间所具有的破坏性动能,用E表示。
对应不同类型冲突的冲突能量可用下列公式表示:
(1) 正向冲突和追尾冲突:
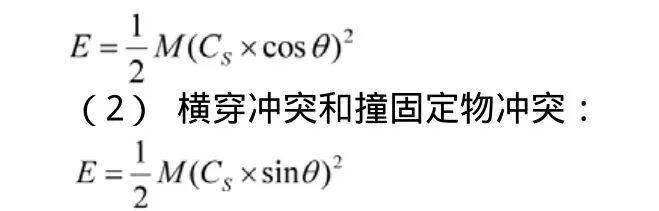
式中:
E——冲突能量(N·m)
M——冲突车辆的质量(kg)
CS——冲突速度(m·s-1)
θ——冲突角(度)
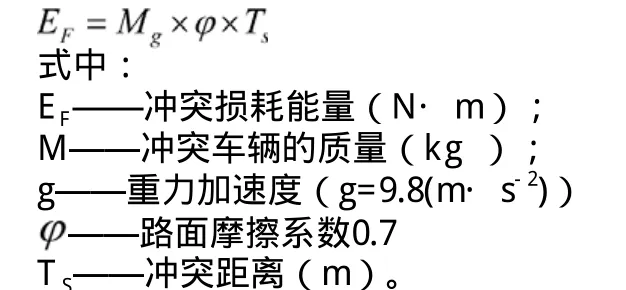
冲突车辆在采取避险行为后,以最大减速度行进直到相撞点,并且车辆在此过程中能量全部损失,即等于路面摩擦力所消耗的能量,这种损失的能量被定义为冲突损耗,其计算公式为:
由冲突能量和冲突损耗可以定义碰撞能量(TED),即冲突车辆在到达相撞点时所具有的破坏性能量。那么,根据 TED 的大小就可判断冲突的危险性ROC,TED 越大,则冲突的危险性越大。其计算公式为:

临界冲突区域判别法,以目标车辆为坐标原点,建立直角坐标系,通过对车辆的行驶方向、角度及速度进行分解,计算冲突对象之间冲突半径,建立相应的冲突临界区域来判定交通冲突[21]。该判别模型突破了传统以单一交通目标为研究对象的局限性,综合考虑出冲突对象双方的行驶方向,速度,距离等指标,完善了基于视频的冲突判定规则。
由于冲突判定模型均需要获取交通对象的速度、角度、位置等精确数值,对冲突检测手段,设备精度要求很高,而以传统的观测手段以人工调查为主,很难达到冲突判定模型的观测精度要求,从而降低了交通冲突调查的准确程度。
3.3 基于视频的交通冲突检测与判定应用
随着视频图像处理技术的应用,为交通冲突检测与判定开辟了另一种途径。
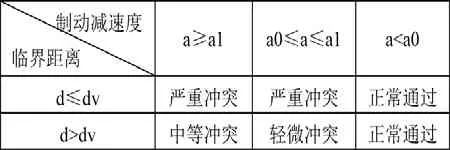
表3 加速度与距离结合法冲突判定规则
加速度与距离结合法[22],通过视频技术对车辆进行跟踪,通过齐次坐标转换将图像坐标转换为地面坐标,以得到车辆的真实行驶位置;通过两帧之间位置变化,得出车辆真实的行驶速度及加速度,最后对实际路口进行分析分析,得出判定交通冲突的临界值为a0为4m·s-2和临界距离dv为10米,界定轻微冲突与严重冲突的临界值为a1为2m·s-2。制订了如下的判定规则。
轨迹预测法[23],利用视频技术,检测交通对象并进行跟踪,获取物体运动数据与类别的基础上,记录其时空运动轨迹;并引入GM(1,1)灰色模型实现对交通对象的轨迹预测,从而判断在未来的一段时间内是否有与其他对象发生事故的可能,结合交通对象方向和速度的变化,判断出冲突现象。
可以说引入视频图像处理技术,使得学者能更加全面系统,定性定量的分析和制定交通冲突判定方法,给交通冲突的判定方法研究开拓了新空间。
4 结语
随着城市发展的加快,城市道路更加从综复杂,道路交叉口的安全评价日益重要,交通冲突技术作为道路安全评价的有效手段需要发挥更大的作用,因此,对交通冲突技术的理论和应用研究有着重大的意义。
视频处理技术的引入,将交通冲突技术的研究带向了一个更广阔的平台,但是由于视频处理技术的不成熟,还存在如下一些亟需解决的问题。
1)观测精度的要求。冲突的发生表现在交通行为者的行驶速度、行驶方向变化,严重程度体现在加速度、减速时间、转向角度、冲突者之间距离等数据的变化。基于视频的交通冲突观测需要更加全面的交通行为数据采集,因为这些数据精度直接影响着冲突判定的精度。
2)摄像机成角度拍摄导致精度下降。采集交通数据时,摄像机往往成一定角度进行拍摄,由于二维视频图像较真实场景有所差异,因此,还原真实数据的方法有待解决。
3)观测速度要求。基于视频的交通冲突的优势之一在于实时性,由于交叉口交通行为者较多,因此亟需完善一种全面、准确、实时的数据采集手段。
4)制定基于视频的交叉口交通冲突的判定规则。传统的冲突判定有受到观测手段的局限,仅仅依靠单一的参数进行判定,对严重冲突判定的误差较大。基于视频的交通冲突采集数据更加完善,因此制定一套综合考虑交通行为者的交通状态,且适合视频采集数据的冲突判定规则,有着重要的意义。
5)冲突对象的判定。由于城市道路交叉口大多缺乏行人天桥或者通道,冲突发生往往由机动车和机动车以外的交通行为者造成,因此,基于视频的交通冲突检测在非机动车与行人检测方面有待研究。
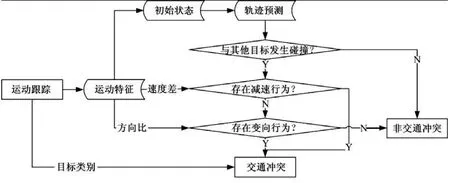
图3 轨迹法冲突判定规则
[1]王玉江.路段交通冲突技术研究[D].昆明理工大学,2008
[2]Glauz W. D.,Migletz D. J. Application of Traffic Conflict Analysis at Intersections [J].TRB,NCHRP Report,USA. 1980:218-221
[3]李晓娟,丁艺.交通冲突技术及其研究现状分析[J].森林工程,2006,22(1):41-43
[4]王力,刘卫中,洪于亮,范耀祖.基于分类交通冲突与微观仿真分析的城市交叉口安全诊断及改善[J].中国安全科学学报,2009,19(2):38-42
[5]付锐,魏朗,骆勇,牛永亮.郑州黄河公路大桥交通安全冲突技术的研究[J].中国公路学报,2000,13(3):86-88
[6]刘小明,段海林.平面交叉口交通冲突技术标准化研究[J].公路交通科技,1997,14(3):29-34
[7]刘志强,葛如海,龚标.道路交通安全工程[M].北京:化学工业出版社,2005
[8]M.R. Parker,C.V. Zegeer,Traffic Conflict Technique for Safety and operations: Observers manual[R]. U.S. Federal Highway Administration,Washington, D. C.,1989
[9]卢川,项乔君,张国强,吴群.公路平交口交通冲突严重性的判定[J].合肥工业大学学报(自然科学版),2008,31(5):683-686
[10]S. Atev, O. Masoud,R. Janardan,N.Papanikolopoulos,Real-Time Collision Warning and Avoidance at Intersections[C]. Final Report,MN/RC,2004,12
[11]S. Messelodi,C. M. Modena,A Computer Vision System for traffic accident risk measurement:A case study[J]. Advances in Transportation Studies an international Journal Section B7,2005
[12]张方方.基于视频的平面交叉口机动车交通冲突检测技术研究[D].同济大学工学硕士学位论文,2008
[13]曲昭伟,李志慧,胡宏宇,郭伟伟,魏巍.基于视频处理的无信号交叉口交通冲突自动判别方法[J].吉林大学学报(工学版),2009,39(2):163-167
[14]王俊骅,张方方,张兰芳.基于OpenCV和Halcon的交通冲突视频自动检测及数据处理[J].同济大学学报,2010,38(2):238-244
[15]李志慧,赵永华,魏巍等.基于视频的自行车检测算法[J].吉林大学学报(工学版),2010,40(5):1235-1238
[16]胡宏伟.基于视频处理的交通事件识别方法研究[D].吉林大学,2010
[17]王海星,申金升.基于TCT的平面交叉口安全评价方法研究[J].中国安全科学学报.2005,15(5):101-104
[18]项乔军,陆键,卢川,葛兴.道路交通冲突分析技术及应用[M].科学出版社,2008
[19]成卫.城市道路交通事故与交通冲突技术理论模型及方法研究[D].吉林大学,2004
[20]Older S. J.,ShiPPy J. Proceedings of the Second International Traffic Conflict Workshop[J].1979:21-25
[21]罗石贵,周伟.路段交通冲突技术研究[J].长安大学学报,2991,23(1):71-75
[22]仲媛媛.基于交通冲突的公路平面交叉口模糊安全评价研究[D].哈尔滨工业大学工学硕士学位论文,2006
[23]郭伟伟,曲昭伟,王殿海.交通冲突判别模型[J].吉林大学学报(工学版),2011,41(1):35-40
Overview of the Research on Intersection Traffic Conflict Technique
Wang Yuquan,Hu Xiaoping
North China University of Technology,Beijing 100144
Research on the situation of traffic conflict technology,explanation of the basic concept of this technology,observation methods,discrimination rules of traffic conflict technology and intersection traffic conflict technique in the safety assessment application. Summary of the limitations about the traditional observation methods and discrimination rules of traffic conflict technology,a comparison between the video technology of traffic conflict and the tradition traffic conflict technology,analysis the feasibility of video-based technology of conflict,some view for developments on the intersection traffic conflict technology were put forward in the last.
traffic conflict technique;video processing;crossing traffic safety assessment
国家高技术研究发展计划(863计划)交通枢纽综合感知与智能管控平台(2012AA112401);科研基地-科技创新平台-城市混合交通信号控制系统平台建设(PXM2012_014212_000001)
10.3969/j.issn.1001-8972.2013.07.065
王玉全(1984-).女,工学博士研究生,讲师,研究领域为:智能交通;
胡小平(1986-).男,工学硕士研究生,研究方向为:智能交通。
