敏捷卫星宽幅动态成像姿态调整技术研究
2013-01-08黄群东杨芳赵键
黄群东 杨芳 赵键
(航天东方红卫星有限公司,北京 100094)
1 引言
敏捷卫星的动态成像技术,是指卫星在三轴姿态机动中开启相机进行“动中拍”成像,并在成像过程中实时调整光轴对地指向,从而实现姿态对地指向不断变化的成像方式。法国昴宿星-HR(Pleiades-HR)[1]卫星在沿轨道运行时,通过对姿态的调整实现“动中拍”成像任务。卫星在侧摆机动的同时,通过控制姿态的俯仰角来补偿轨道运动在地表的牵连速度,从而实现单圈过境内的宽幅区域成像。Pleiades-HR 卫星采用上述成像方式,可以实现350km×20km 的幅宽[2],对东西方向的覆盖区域达到了350km,在提高幅宽的同时能够保证0.7m的全色分辨率,较现有卫星的多条带拼接成像具有一定的优势。
对于敏捷卫星的“动中拍”成像模式,文献[3]对动态成像模式进行了设计,从相机角度考虑了动态遥感过程中的技术指标,但是并未从卫星平台控制角度考虑机动过程中的姿态调整技术。文献[4]提出敏捷卫星的动态扫描成像模式,指出该成像模式对非沿轨迹方向的狭长地物目标(如海岸线)具有很好的时效性,但没有对动态扫描成像模式的姿态运动学规律进行深入研究。
在姿态调整方法上,现有卫星的条带成像采用对地定向的推扫成像方式,均为沿轨迹方向推扫,形成的条带基本平行于轨道运行方向,成像幅宽受相机幅宽的限制,其成像过程中实际上利用了轨道运动,除了偏流角控制,卫星的俯仰和滚动角速度标称值为零。对于偏流角控制,有如下两种方法:一种是通过卫星姿态的偏航控制来实现;另一种是在相机上设计一套转动机构驱动相机旋转来实现。文献[5]提出了采用遥感器的视线校正进行偏流角的控制,文献[6]提出采用姿态的偏航控制实现偏流角的校正。文献[7-8]提出在卫星上安装偏流角控制系统实现偏流角控制。上述文献采用的姿态调整方法,仅考虑了偏流角控制问题,未对卫星的俯仰和滚动方向进行控制,因此,其姿态调整技术仅适用于对地定向的推扫成像方式,无法满足对地指向不断变化的“动中拍”成像方式。
文献[9-10]分析了姿态对地指向不断变化时成像的偏流角,结论如下:对于非沿轨迹方向的条带成像,偏流角是由地球自转、卫星沿轨道运动和姿态机动共同产生的,数值较大,对卫星平台控制和相机提出了很高的要求;因此,在控制策略上,进入遥感区域前要在偏航调整初步校正时间延迟积分CCD(TDICCD)方向后,通过控制卫星本体的滚动和俯仰来抵消轨道运动的牵连作用,以实现特定的成像任务。文献[11]分析了国外对地观测卫星所采用的技术手段和所达到的控制精度。文献[12]提出了一种简化计算方法,对敏捷合成孔径雷达(SAR)卫星滑动聚束模式下的控制要求进行了分析,但文中仅考虑了俯仰方向的控制需求,没有考虑偏航角的调整和滚动方向的控制需求,因此不适用于相机TDICCD 成像。文献[13]在未采取姿态控制补偿策略的基础上,推导了“动中拍”过程中的像移速度问题,并量化了不同角速度下的积分时间数量级,为动态成像角速度上限提供参考。上述文献对动态成像方式进行了初步分析,从相机成像原理考虑了机动中成像的关键遥感技术指标,但并未给出其三轴姿态角的运动学规律及姿态调整方法。本文就宽幅动态成像模式进行研究,以太阳同步轨道为例,得到这种成像模式下的姿态调整技术,通过数值仿真分析了该成像模式对姿态控制精度的要求,可为动态成像的姿态控制设计提供参考。
2 动态成像控制分析
高分辨率相机系统为了实现高分辨率,其视场角较小,导致地面覆盖宽度较小。如美国艾科诺斯-2(IKONOS-2)卫星的覆盖宽度仅为11km,法国Pleiades-HR 卫星覆盖宽度也只达到了20km,高分辨率光学遥感卫星相对较小的幅宽与大范围的地面目标探测需求成为了一对矛盾[4]。当前敏捷卫星的控制技术是采用快速机动到位后,利用轨道的运动进行推扫成像,通过多条带拼接成像实现东西方向大范围成像,对于幅宽为20km 的成像幅宽,即使进行了5次条带的拼接成像,对东西经度方向的覆盖幅宽也只有100km,与350km 还有很大差距。宽幅动态成像方式,则是利用卫星姿态的机动来解决宽幅宽与高分辨率的矛盾,在姿态控制稳定度上具备了相当的能力后,姿态机动过程中采用推扫成像的方式,从而大大提高图像覆盖能力。因此,卫星在机动过程中进行“动中拍”的成像方式,是解决高分辨率成像与大范围覆盖这对矛盾的一条技术捷径。
2.1 数学建模
图1为宽幅动态成像过程示意图。进行宽幅动态成像时,卫星要首先绕卫星本体坐标系Z 轴旋转90°,将线阵TDICCD方向调整到位,再绕卫星本体坐标系Y 轴进行俯仰控制(轨道系为侧摆)实现推扫成像,同时卫星本体坐标系X 轴进行滚动控制(轨道系为俯仰)来补偿轨道运动的牵连作用。通过卫星的姿态控制,即可获得垂直于航迹方向的图像。
宽幅动态成像过程中,若线阵TDICCD 级数方向与轨道运行方向一致,则卫星要先绕本体坐标系Z 轴旋转90°,将线阵TDICCD 级数方向调整到位后进行推扫成像,这将造成卫星本体坐标系与轨道坐标系不一致。为了讨论方便,假设线阵TDICCD级数初始方向与条带方向一致。
设卫星运行于倾角为i的轨道,角速度为ω,高度为H;地球自转角速度和半径分别为ωe和Re;δDn为目标Dn的纬度(n=1,2,3…),b为OT 段的地表弧长对应的地心张角,h 为目标地面高度。垂直航迹成像过程如下:绕卫星本体坐标系X 轴以角速度ωφt(滚动角φt 变化角速度)垂直于航迹方向进行推扫成像;成像起始时刻为t1,此时卫星本体坐标系Z 轴与轨道坐标系Z 轴的夹角为α1,滚动角为φ1,俯仰角为θ1,偏航角为β1;t表示成像过程中的任意时刻,对应的滚动角为φt,俯仰角为θt,偏航角为βt,卫星本体坐标系Z 轴与轨道坐标系Z 轴的夹角为αt。

图1 宽幅动态成像过程示意图Fig.1 Process of wide regional dynamic imaging
当卫星光轴指向S1D1时,光轴在地表的投影牵连速度为

D1点地球自转线速度为

为了实现垂直于航迹方向的条带成像,完成一次东西方向的推扫成像,就要控制俯仰轴补偿轨道运动;如果不进行俯仰控制,由于轨道运动的牵连作用,实际推扫条带将为斜条带,如图1中的虚线框所示。由模型分析得到俯仰控制补偿地速Vs见式(3)。垂直于航迹成像时,地球自转速度Ve,D1在轨道运动方向的分量ωeRecosδDnsin(i-π/2),通过偏航调整予以校正。

1)俯仰角
俯仰角θt的速度为ωθt,其变化规律为(补偿速度)

式中:L 为摄影点至卫星的距离。

2)滚动角
滚动角变化规律为

3)偏航角
由文献[9]得到偏航角βt 的变化规律为
式中:Vη为推扫条带方向η 对应的条带滚动推扫速度,本文中η为90°。
在垂直于航迹方向成像过程中,通过控制俯仰角θt的变化来补偿地表的牵连速度,因此,式(9)中地表牵连速度项(ωRecosbn)去掉,得到偏航角的变化规律如下。
需要说明的是,上述姿态角基于“1-2-3”的姿态角转序,姿态角度数据基于轨道坐标系。
2.2 数值仿真
数值仿真条件如下:轨道高度H =700km,地球半径Re=6378km,轨道倾角i=98.192 8°,轨道周期T=5 926.38s;初始俯仰角θ1=30°;采用恒定角速度ωφ1=ωφt=0.5(°)/s;初始滚动角φ1=30°;时间步长取0.1s,成像时间120s。采用MATLAB软件编写程序进行数值计算,获取1200 组数据。
滚动角、俯仰角将影响相机的视轴指向,偏航角要校正偏流角。由数值仿真结果提取三轴姿态角信息,如图2所示。图3为俯仰角变化,俯仰角的实时调整是为了克服轨道运动在地表的牵连速度的影响;由数值仿真结果得到控制精度需求是0.01°~0.05°。图4为俯仰角速度变化。
轨道运动在地表的牵连速度为定值,而卫星在姿态调整过程中的光轴有效长度在实时改变,因此造成补偿地速的角速度实时变化。由上文分析可以得到,补偿地速的角速度与轨道高度、轨道角速度、成像地理纬度和俯仰角、滚动角有关。通过分析得到俯仰角加速度的控制精度要求为0.003 0~0.000 1(°)/s2。
由数值仿真结果得到三轴姿态角参数(见图2),将这些数据编写成STK.a文件,进行场景仿真,可以实现图5中的宽幅成像模式。
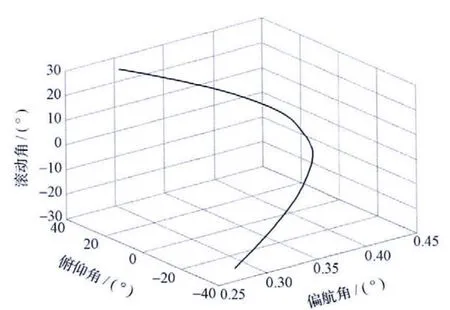
图2 姿态角变化Fig.2 Attitude angle change

图3 俯仰角变化Fig.3 Pitch angle change

图4 俯仰角速度变化Fig.4 Pitch angular speed change

图5 宽幅成像模式Fig.5 Wide regional imaging mode
2.3 仿真结果分析
2.3.1 姿态角指向精度
仿真数据中,俯仰角的变化间隔是0.01°~0.05°;滚动角的指向精度要求是0.05°。为了实现上述成像方式,姿态角指向精度要达到0.01°。
2.3.2 角加速率控制精度
完成一次垂直于航迹方向条带的推扫成像,由于要对轨道运动进行补偿,俯仰角和滚动角要从+30°机动到-30°,为了配合相机的TDICCD推扫成像,俯仰角速度的变化范围在0.41~0.51(°)/s,角速度控制步长精度要求达到0.003 0~0.000 1(°)/s2(见图6)。这个指标意味着,卫星在姿态机动过程中要保持较高精度的角速度。
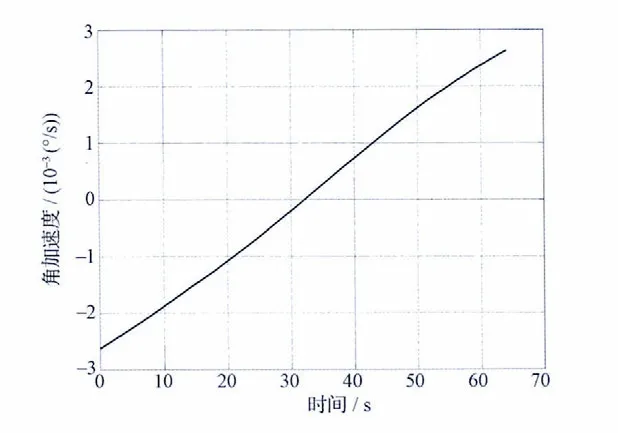
图6 俯仰角加速度变化Fig.6 Angular acceleration change in pitching
补偿地速Vs的俯仰角加速度对姿态控制的要求精度最高。就目前的情况来看,可从以下几方面实现姿态机动过程中高精度角速度的控制需求。
(1)提高姿态控制精度,以实现对高精度的角速度进行控制。
(2)从光学有效载荷方面入手,通过相机的精密控制转动,实现对角速度的高精度控制。
(3)在小角度内,采用恒定的角速度进行控制,通过平滑的控制实现角速度的变化。
3 姿态调整策略
3.1 俯仰角控制策略
在小角度内采用恒定的俯仰角速度分阶段进行俯仰控制,俯仰方向按表1的控制策略进行机动。

表1 宽幅成像模式的俯仰角控制策略Table 1 Control method for pitch angle at wide regional imaging mode
3.2 偏航角调整策略
卫星相机获取图像质量的优劣,一般用整个系统的调制传递函数(MTF)来评价。该系统包括地面目标、大气、光学系统、像移、探测器、电子线路等各子系统。系统总的MTF 等于各子系统的MTF之积。其中,由像移匹配残差得出的MTF为[14]
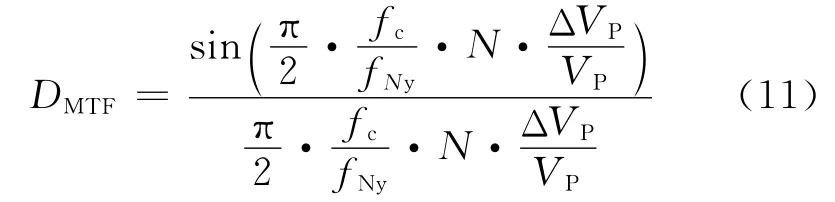
式中:fc为特征频率,等于耐奎斯特频率fNy;N 为TDICCD 的积分级数;VP为像移速度;ΔVP为像移速度残差。
偏流角的控制策略为:根据成像的总体指标得到速度匹配残差的取值范围,从而获得允许的偏流角误差,当偏流角变化量大于允许的偏流角误差时,进行姿态的偏航控制。假定成像总体指标为MTF下降2%对成像质量无本质影响,从而得到不同积分级数下允许的偏流角误差[14],见表2。
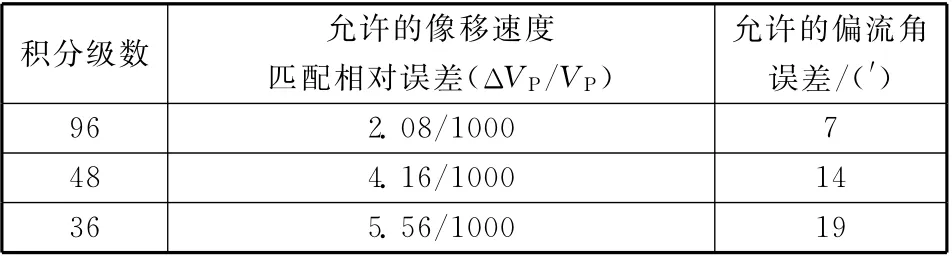
表2 不同积分级数下允许的偏流角误差Table 2 Permitted errors of drift angle in different integration progressions
姿态调整技术为:偏航调整分为两个阶段,即初调整和精调整。初调整阶段是当卫星进入遥感区域成像时根据当地的偏流角进行偏航调整,调整值由式(10)得到;精调整阶段是在相机成像过程中,当偏流角的变化量超出允许的偏流角误差时进行偏航控制。
4 结束语
本文对宽幅动态成像模式的姿态调整方法进行了研究,对与星下点轨迹方向成任意夹角的条带,要结合星敏感器的动态性能、相机的能力进行界定。由现有相机的曝光极限能力界定不同轨道高度下的机动角速度上限,进而界定成像条带与星下点轨迹方向的最大夹角。在后续研究中,将结合姿态控制系统及部件的补偿能力、相机的补偿能力,识别卫星工程上实现本文所仿真出来的姿态角/角速度指标的关键技术。在此基础上,加强对相机成像工作模式的深入研究,以确定姿态控制与相机成像的有机结合,开展与星下点轨迹存在任意夹角的条带成像工作模式研究;在本文俯仰角、偏航角调整策略的基础上,进一步明确斜条带模式下的滚动角控制调整策略,以提高对非沿轨迹方向的狭长地物目标(如海岸线)成像的时效性。
(References)
[1]Jaubert J,Julien E,Lassalle-Balier G,et al.Attitude guidance technics developed in CNES for Earth observation and scientific missions[C]//Proceedings of the 28th Annual AAS Guidance and Control Conference.San Diego:AAS Publications Office,2005
[2]Perret L,Boussarie E,Lachiver J M,et al.The Pléiades system high resolution optical satellite and its performances[C]//Proceedings of the 53rd International Astronautical Congress.Paris:Mario-Nikis,2002
[3]黄群东,杨芳.敏捷卫星动态遥感技术指标分析[C]//第一届空间光学技术全国学术会议论文集(下册).北京:中国光学学会,2012:55-63 Huang Qundong,Yang Fang.Analysis of key indicators for agile satellite dynamic imaging[C]//Proceedings of the 1st National Conference of Space Optics Technologies(Volume Ⅱ).Beijing:Optics Academy of China,2012:55-63(in Chinese)
[4]张新伟,戴君,刘付强.敏捷遥感卫星工作模式研究[J].航天器工程,2011,20(4):32-38 Zhang Xinwei,Dai Jun,Liu Fuqiang.Research on working mode of remote sensing satellite with agile atti-tude control[J].Spacecraft Engineering,2011,20(4):32-38(in Chinese)
[5]王志刚,袁建平,陈士橹,等.高分辨率卫星遥感图像的偏流角及其补偿研究[J].宇航学报,2002,23(5):39-43 Wang Zhigang,Yuan Jianping,Chen Shilu,et al.Study on satellite remote sensing high resolution image bias-angle and its compensation[J].Journal of Astronautics,2002,23(5):39-43(in Chinese)
[6]袁孝康.星载TDI-CCD推扫相机的偏流角计算与补偿[J].上海航天,2006,23(6):10-13 Yuan Xiaokang.Calculation and compensation for the deviant angle of satellite borne TDI-CCD push scan camera[J].Aerospace Shanghai,2006,23(6):10-13 (in Chinese)
[7]于涛,徐抒岩,韩诚山,等.空间相机偏流角的间歇式实时调整[J].光学精密工程,2009,17(8):1908-1914 Yu Tao,Xu Shuyan,Han Chengshan,et al.Batchtype real-time adjustment for drift angle of space camera[J].Optics and Precision Engineering,2009,17(8):1908-1914(in Chinese)
[8]李友一.空间相机中的偏流角控制[J].光学精密工程,2002,10(4):402-406 Li Youyi.Study of the drift angle control in a space camera[J].Optics and Precision Engineering,2002,10(4):402-406(in Chinese)
[9]黄群东,杨芳,赵键.姿态对地指向不断变化成像时的偏流角分析[J].宇航学报,2012,33(10):1544-1551 Huang Qundong,Yang Fang,Zhao Jian.Drift angle analysis for agile satellite imaging when its attitude points to the Earth changing continuously[J].Journal of Astronautics,2012,33(10):1544-1551(in Chinese)
[10]黄群东,杨芳,赵键.敏捷成像速度失配时的偏流角计算及姿态补偿[C]//2011年先进航天控制技术发展学术会议论文集.北京:中国航天科技集团公司,2011:136-144 Huang Qundong,Yang Fang,Zhao Jian.Calculation and attitude compensation for drift angle caused by agile imaging and velocity mismatch[C]//Proceedings of the 2011 Development of Advanced Space Control Technologies Conference.Beijing:CASC,2011:136-144(in Chinese)
[11]施少范.国外对地观测卫星高精度姿态控制系统研究[J].上海航天,2000,17(6):49-53 Shi Shaofan.Study on high precision attitude control systems of foreign earth-observation satellites[J].Aerospace Shanghai,2000,17(6):49-53(in Chinese)
[12]侯小瑾,杨芳,刘胜利,等.敏捷SAR 卫星滑动聚束模式下的控制要求分析[C]//小卫星技术交流会优秀论文集.北京:航天东方红卫星有限公司,2011:144-149 Hou Xiaojin,Yang Fang,Liu Shengli,et al.Analysis of control demand of sliding spotlight mode based on agile SAR[C]//Proceedings of the Small Satellite Technology Dissertation Forum.Beijing:DFH Satellite Co.Ltd,2011:144-149(in Chinese)
[13]黄群东,杨芳,赵键.姿态对地指向不断变化成像时的像移速度计算[J].光学精密工程,2012,20(12):2812-2820 Huang Qundong,Yang Fang,Zhao Jian.Calculation of image motion velocity for agile satellite dynamic imaging to changed continuously attitude point[J].Optics and Precision Engineering,2012,20(12):2812-2820(in Chinese)
[14]闫得杰,徐抒岩,韩诚山.飞行器姿态对空间相机像移补偿的影响[J].光学精密工程,2008,16(11):2199-2203 Yan Dejie,Xu Shuyan,Han Chengshan.Effect of aerocraft attitude on image motion compensation of space camera[J].Optics and Precision Engineering,2008,16(11):2199-2203(in Chinese)