基于人机工程的自卸车操纵杆舒适度分析
2013-01-07吕胜谷正气伍文广梁小波彭国普
吕胜,谷正气,伍文广,梁小波,彭国普
(1. 湖南大学 汽车车身先进设计制造国家重点实验室,湖南 长沙,410082;2. 湘电重型装备股份有限公司,湖南 湘潭,411100)
现代汽车设计强调以人为中心,舒适性已经成为汽车驾驶室设计的重要思想。目前,国内自卸车驾驶室基本都是按照美国机动车协会(SAE)推荐的方法进行布置,且现有的基于关节角度[1−2]的舒适性评估方法存在局限性,人体的不舒适性主要由2个方面引起:一是关节角度,二是关节力矩。在操作过程中,关节力矩是一个重要影响因素,为此,本文作者基于Kane动力学方程建立上肢的动力学模型,求解推拉操纵杆时的关节力矩,对现有的基于关节角度的舒适度模型进行改进,将力矩因素引入舒适性评估中。
1 人体上肢生物力学模型
首先建立人体上肢的动力学模型。人体上肢的运动主要由肩关节、肘关节和腕关节的相对运动来实现,基于人体上肢的驾驶动作分析可将人体上肢系统简化为 3个连杆(即上臂、前臂和手腕)组成的铰链机构,对人体进行如下简化:忽略各部分的形变,将其视为刚性杆,上臂对肩关节取为3个自由度(即上臂水平屈伸、上臂侧举、上臂旋转),前臂对肘关节的自由度取为1个(即前臂弯曲),手对腕关节的自由度取为1个(即前臂弯曲),建立上肢的三连杆五自由度模型。考虑到人体上肢构造,各刚性杆的质心和形心不重合。在计算中,人体尺寸[3]设计规范取第50百分位,上肢各体段的长度、质量、质心、转动惯量、关节活动范围可由运动生物力学[4]获得,其值如表1所示。
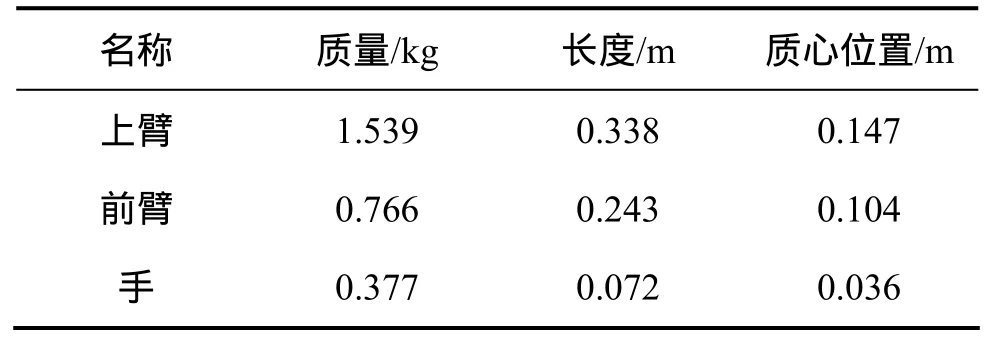
表1 上肢各体段生物力学参数Table 1 Biomechanics parameters for body segments of upper limb
为了表示驾驶员的上肢的空间位置,建立如下坐标系[5−6]:e为惯性参考系,其坐标原点O位于以肩关节为铰链的铰链中点;e1的正向是从后背到前胸,e2的正向是从躯干轴心到外侧,e3的正向是由上向下;上肢各段的固联坐标系为e(t),上肢各段的轴向为e1(t)。e2(t)垂直体段轴向并指向外,当上肢抬起至水平时,e(t)与e的方向相同。
设肩关节的内收外展为a1,前屈后伸角为a2,旋转角为a3,对应各角度作用在肩关节处的关节力矩分别为M1,M2和M3;肘关节的前屈后伸角为a4,对应的肘关节力矩为M4,腕关节的前屈后伸角为a5,对应的腕关节处的力矩为M5;F为操纵杆对上肢运动链末端手腕的反作用力;G1,G2和G3分别为上臂、前臂和手腕的重力。人体上肢的动力学模型如图1所示。
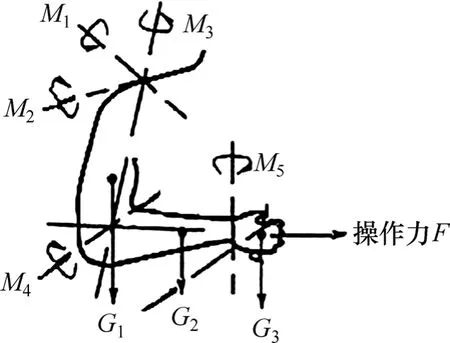
图1 人体上肢生物力学模型Fig.1 Biomechanics model for upper limb
2 理论介绍
2.1 Kane方法基本原理
Kane方法[7−8]是建立在广义速率、偏速度、广义主动力、广义惯性力等概念基础上,其表述式为

式中:Fr为系统广义主动力;为系统广义惯性力。假设系统有k个刚体,n个广义速度(即自由度),因为广义主动力是外力(包括力和力矩)和第j点的偏速度的点积。广义惯性力是(包括惯性力和惯性力矩) 和第j点的偏速度的点积。
式中:r为广义坐标数(即系统自由度);j为刚体数目。Kane方程通过周密推导和证明得出结论:作用在系统上的对应每个广义速度的广义主动力和广义惯性力的代数和为0。
本文中的上肢模型有3个刚体和5个自由度,即k=3,n=5。本文只考虑上肢处于静止状态的情况,此时,,也就是通过求解方程组即可获得下肢三关节在每个自由度上的肌肉力矩。
2.2 NASA力量模型
从NASA力量模型[9]可知:关节各个自由度上的舒适度Cr与关节力矩的关系可用线性函数表示,且该函数跟关节无关。

式中:Dr为关节各个自由度上的不舒适度;Mr为自由度上关节力矩,可以通过上面叙述的Kane方程求解;Mrmax为此自由度上关节最大可承受力矩。
最大可承受力矩可用下式获得:

式中:b0,b1和b2分别为最小二乘法的拟合系数,分别依据转动角度、转动方向和转动角速度查系数表[10]获得;其他角速度用插值法获得,θ为此时的关节角度。
Cr越大,表示实际关节力矩与最大关节力矩比值越小,可用剩余力矩越大,人操作时相应感到舒适。取舒适性水平Cr为0.4,即当实际力矩不大于最大力矩值的60%时认为操作是舒适的。
本文研究转动方向和转动角速度为某一定值时的情况下,各关节角度取不同值的舒适度状况,从而获得操纵杆的舒适操作范围。
3 单关节舒适度评价与分析
3.1 典型驾驶姿势驾驶姿势定位
用UG建立自卸车的驾驶室模型,然后导入人机工程分析软件RAMSIS中定位典型姿势。RAMSIS软件(即模拟乘员实际操作状况的计算机辅助人体数学模型)是一款专门用于人机工程性能校核的软件,它是由德国各大汽车公司和座椅厂家共同开发的 CAD工具。得到的效果图如图2所示。
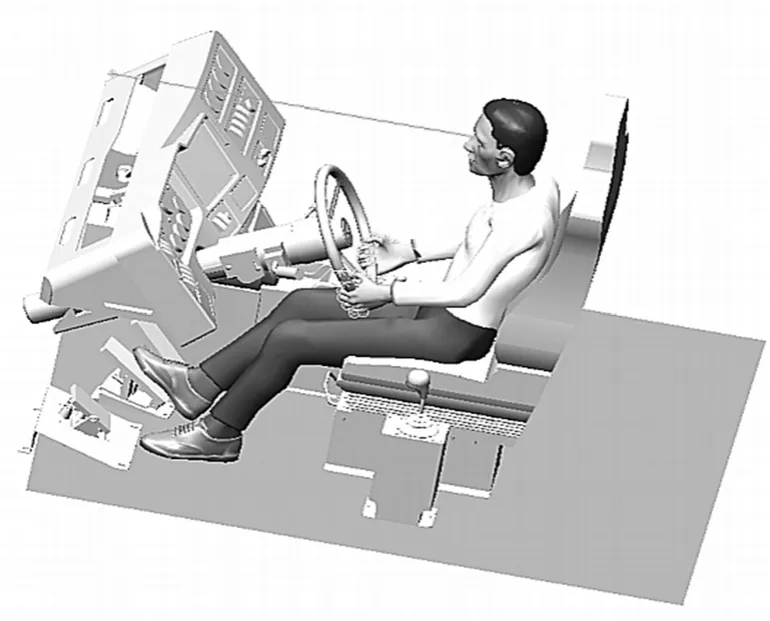
图2 人体驾驶典型姿势Fig.2 Typical posture for dump truck driving
3.2 操作力F对关节力矩的影响
由于操纵杆的位置主要由肩关节的前屈后伸角a1、肩关节的内收外展角a2和肘关节的前屈后伸角a3决定,所以,本文只研究这3个参数变量。以上肢的舒适度为目标函数进行优化设计,此时上肢自由度为3个。
首先研究操作力F与各个关节力矩的关系。在图1所示的典型操作姿势下,固定各关节角度,取操作力F为变量,得到肩关节屈伸力矩M1、肩关节展收力矩M2和肘关节屈伸力矩M4随操纵力F的变化关系,见图3。从图3可见:3个关节力矩随操纵力的变化趋势,即首先随着操纵力增大,3个关节力矩先不断减少直至0 N·m;然后,随着操纵力的增大,关节力矩反向增大。这主要是因为当操纵力很小时,关节力矩主要为支撑作用,其作用是抵消上肢重力在关节处产生的力矩,从而保持上肢各关节处于特定位置;当操纵力在关节处产生的力矩足以抵消重力力矩时,关节力矩为0 N·m,然后,随着操纵力继续增加,关节力矩将反向呈线性增加。
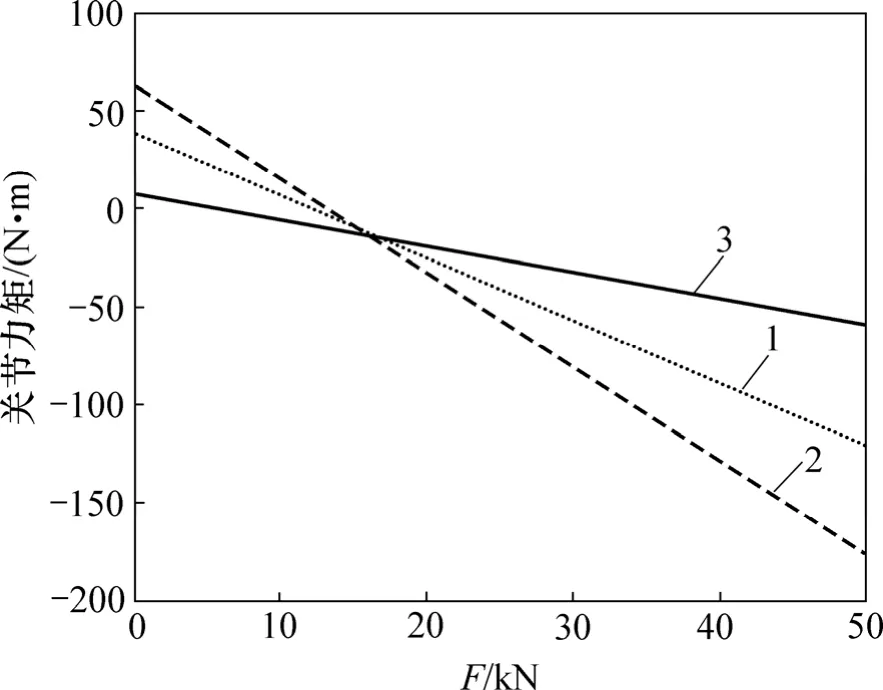
图3 关节力矩与操作力F的关系Fig.3 Relationship between joint torque and operating force
3.3 动力学软件SimMechanics验证
为了证明人体上肢 Kane动力学模型结合 NASA力量模型的正确性,利用SimMechanics动力学软件进行验证。SimMechanics模块是Matlab中专门用于机构设计及其运动仿真的模块,它利用动力学中的力和力矩等基本概念,对各种运动副连接的刚体进行建模和仿真,实现对系统进行分析和设计。人体上肢的SimMechanics模型[11−12]如图 4 所示。
假定驾驶操作力F固定,F=35 N,用SimMechanics动力学软件和Kane动力学模型这2种方法分别建立各关节舒适度随上肢姿势的变化情况。得到上臂屈伸,前臂屈伸和手腕屈伸三分支动作的舒适对比曲线分别如图5~7所示。
从图5~7可以看出:在SimMechanics动力学软件和Kane动力学模型这2种方法下,关节舒适度的基本变化趋势相同,但存在一定偏差。这是因为动力学软件 SimMechanics在仿真过程中存在质心和形状等的简化,由此可证明上肢的 Kane动力学结合NASA力量模型是可靠的。
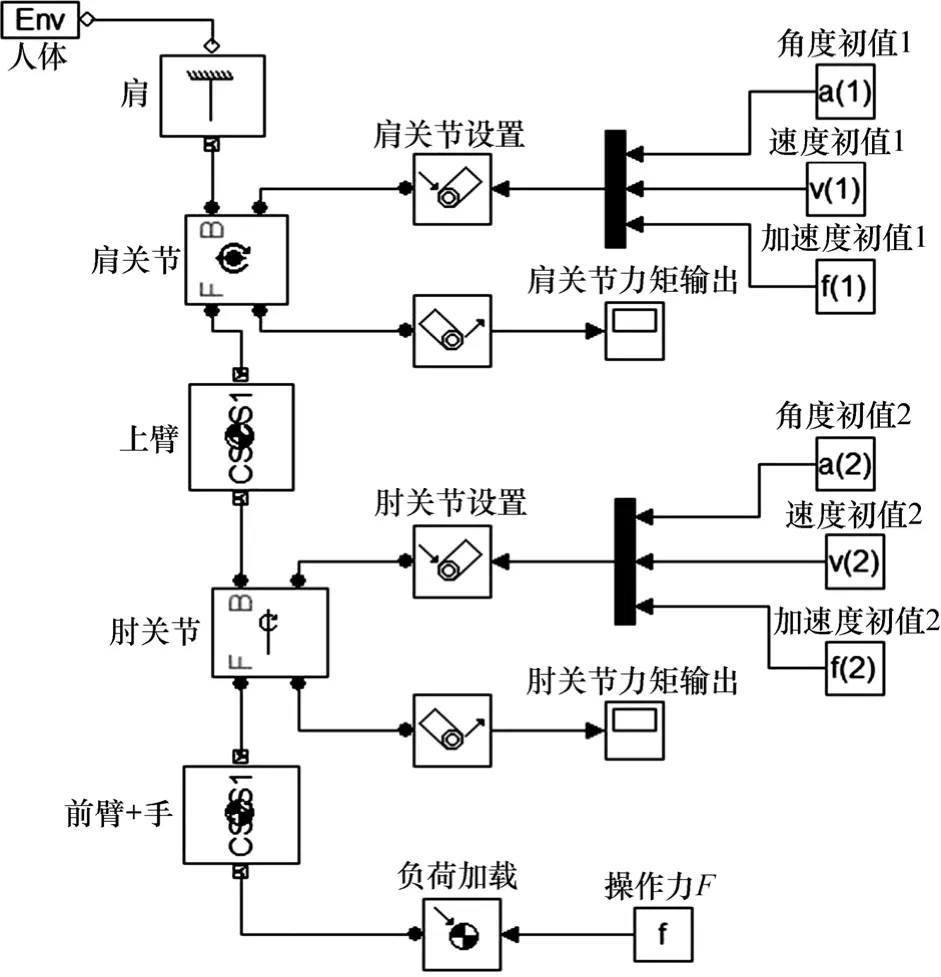
图4 人体上肢SimMechanics模型Fig.4 SimMechanics model for upper limb
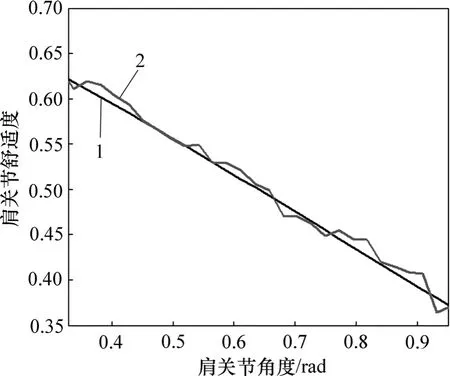
图5 肩关节舒适度曲线Fig.5 Comfort curves for shoulder joint
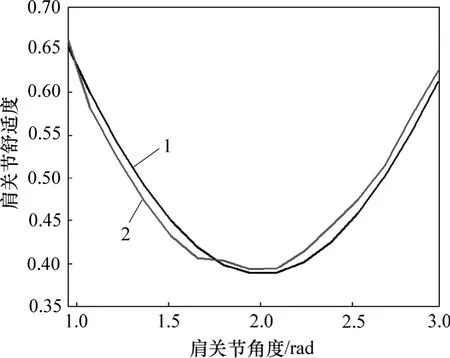
图6 肘关节舒适度曲线Fig.6 Comfort curves for elbow joint
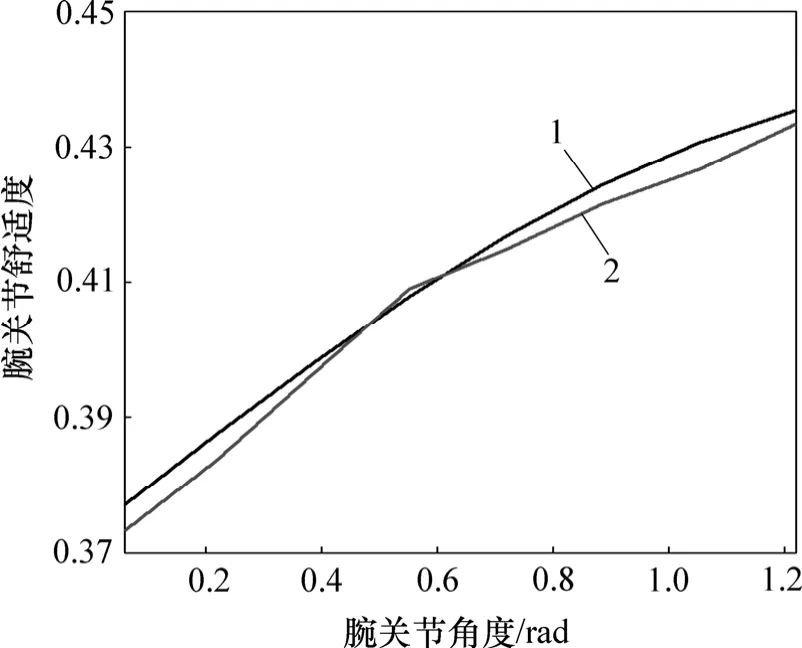
图7 腕关节舒适度曲线Fig.7 Comfort curves for wrist joint
4 上肢舒适度评价与分析
在已知单个关节舒适度的情况下,整个上肢处于某个姿势的舒适度可用下式计算:

式中:n为所评估的身体部位所包含的关节数目,本文取为关节权重,通过查表获得。
下面考察肩关节内收外展角、旋转角和腕关节前屈后伸角取常值即a2=35º,a3=11º,a5=180º时,得到上肢的舒适度曲线随着肩关节前屈后伸角a1、肘关节前屈后伸角a4的变化,如图8所示。
从图8可以看出:上肢舒适度随着肩关节前屈后伸角的增大而不断减少;随着肘关节前屈后伸角的增大,上肢舒适度先减少然后增大。这与图5和图6中得到的单关节舒适度曲线变化趋势保持一致。经进一步分析,得到在这种情况下,传统的关节舒适角度范围[14−15]与依照本文优化模型得出的关节角度舒适范围对比如表2所示。

图8 上肢舒适度变化曲线Fig.8 Comfort curves for upper limb

表2 优化前后关节舒适角度比照Table 2 Joint comfortable angle contrast before and after optimization (°)
5 结论
(1) 构建的 5自由度人体上肢运动模型能够求解操纵过程中各关节力矩。
(2) 并不是传统舒适角度范围内的所有操作都能满足力矩舒适度要求,还应验证此状态下关节力矩,使它满足一定的力矩舒适性指标。
(3) 本文获得的舒适操作关节范围以及上肢舒适度曲线为矿用自卸车的操纵杆布置提供了依据,并可把此优化模型应用到驾驶室其他操控部件如脚踏板、方向盘中,从而提高汽车整个操控界面的人机舒适性。
[1] Se J P, Kim C B, Chul J K, et al. Comfortable driving postures for Koreans[J]. International Journal of Industrial Ergonomics,2000, 26(4): 489−497.
[2] Porter M J, Gyi D E. Exploring the optimum posture for driver comfort[J]. International Journal of Vehicle Design, 1998, 19(3):255−266.
[3] GB 1000—88, 中国成年人人体尺寸[S].GB 10000—88, Human dimensions of Chinese adults[S].
[4] 郑秀媛, 贾书惠, 高云峰. 现代运动生物力学[M]. 北京: 国防工业出版社, 2002: 363−369.ZHENG Xiuyuan, JIA Shuhui, GAO Yunfeng. Modern biologic dynamics[M]. Beijing: National Defence Industry Press, 2002:363−369.
[5] 蔡自兴. 机器人[M]. 北京: 清华大学出版社, 2000: 89−126.CAI Zixing. Robotics[M]. Beijing: Tsinghua University Press,2000: 89−126.
[6] 金万敏, 吴克坚, 姜剑虹. 机器人机械学[M]. 南京: 江苏科学技术出版社, 1994: 339−373.JIN Wanmin, WU Kejian, JIANG Jianhong. Robot mechanics[M]. Nanjing: Phoenix Science Press, 1994: 339−373.
[7] 张国伟, 宋伟钢. 并联机器人动力学问题的Kane方法[J]. 系统仿真学报, 2004, 16(7): 1386−1391.ZHANG Guowei, SONG Weigang. A Kane formulation for the inverse dynamic of Stewart platform manipulator[J]. Acta Simulata Systematica Sinica, 2004, 16(7): 1386−1391.
[8] Kane T R, Levinson D A. Multibody dynamics[J]. J Appl Mech,1983, 50: 1071−1078.
[9] Zacher I, Bubb H. Strength based discomfort model of posture and movement[C]// Digital Human Modeling for Design and Engineering Symposium Proceedings. Rochester, Michigan,USA, Oakland University: SAE Paper 2004−01−2139.
[10] Pandya A K, Hasson S M. Correlation and prediction of dynamic human isolated joint strength from lean body mass[R].N9226682, American: National Aeronautics and Space Administration, 1992: 25−27.
[11] 董玉红, 张立勋. 基于超越离合器和SimMechanics的合作机器人建模与仿真[J]. 哈尔滨工程大学学报, 2005, 26(5):596−602.DONG Yuhong, ZHANG Lixun. Modeling and simulation of robot based on double over-running clutches and SimMechanics[J]. Journal of Harbin Engineering University,2005, 26(5): 596−602.
[12] 任毅, 王隆基, 谢进, 等. 基于 SimMechanics的平面铰链链四杆机构控制系统计算机仿真[J]. 矿山机械, 2004, 31(8):27−29.REN Yi, WANG Longji, XIE Jin, et al. Computer simulation of planar four bar mechanism’s control system based on SimMechanics[J]. Mining Machinery, 2004, 31(8): 27−29.
[13] Kee D, Karwowski W. Ranking systems for evaluation of joint and joint motion stressfulness based on perceived discomforts[J].Applied Ergonomics, 2003, 34: 167−176.
[14] 丁玉兰, 郭刚, 赵江红. 人机工程学[M]. 北京: 北京理工大学出版社, 2000: 185−188.DING Yulan, GUO Gang, ZHAO Jianghong. Human-machine engineering[M]. Beijing: Beijing Institute of Technology Press,2000: 185−188.
[15] 阮宝湘, 邵祥华. 工业设计人机工程[M]. 北京: 机械工业出版社, 2005: 131−132.RUAN Baoxiang, SHAO Xianghua. Human-machine engineering for industry design[M]. Beijing: China Machine Press, 2005: 131−132.
