载人飞船交会对接及组合体模式下的数据管理
2012-12-29王菁
王菁
(北京空间飞行器总体设计部,北京 100094)
1 引言
早期航天器上有独立的遥测、遥控和跟踪定位分系统等,随着航天器的日益复杂,自主管理的需求越来越多,也越来越复杂,传统的遥测、遥控分系统已不能满足任务需求,因此产生了一个综合完成遥测遥控和自主管理任务的分系统——数据管理分系统(DMS)。数据管理分系统是整个卫星系统的关键组成部分,它实现对卫星的控制和进行实验数据传送的功能,与测控、结构、热控、控制分系统一起并列成为卫星平台的五大支柱[1]。
作为载人飞船的重要组成部分,数管分系统(简称数管)负责对整船实施数据管理,功能包括总线通信管理、遥测数据采集、遥测处理与包装下行、遥控注入数据处理与转发、飞行程序控制、指令发送、数据记录与回放、时间管理、故障检测与处理等。
载人飞船数管分系统采用以1553B 串行数据总线连接的两级分布式体系结构,完成包括数据管理、指令管理和系统内部管理的分系统功能。在两级分布式体系结构中,中央终端单元(central terminal unit,CTU)是数管分系统的核心控制设备,是分布式系统的第一级,CTU 通过1553B串行总线对挂接在总线上的其它设备,即两级分布式系统的第二级进行数据管理、指令管理以及系统调度和控制。数管分系统的主要任务和功能由第二级设备直接执行,但执行的时间和执行的条件由CTU 进行控制。第二级设备包括远置单元(RTU)、数据传输复接器(DTCU)和应急数据记录器(CRU),执行数据采集、指令发送、数据复接和数据存储功能。数管分系统的部分任务和关键任务(如逃逸救生、舱段分离、交会对接、返回着陆等事件),由CTU 直接监视、响应和执行。数管分系统在上述两级分布式体系结构基础上完成分系统功能。
交会对接任务对于载人飞船数据管理的需求,增加了不同时统下的两飞行器交会、对接、停靠、分离过程的自主控制和手动控制的数据通信、状态判别、遥测遥控、手控支持要求[2-6]。原有载人飞船数管分系统的设计只能满足载人飞船独立运行的数据管理需求,而对于上述交会对接和组合体停靠的数据管理需求则不能满足。因此,如何兼顾载人飞船独立运行的可靠性、安全性和飞船交会对接及停靠时组合体数据通信和管理的灵活性、可扩展性,是交会对接飞船数据管理设计的重点和难点。本文对上述问题,从分系统结构、总线并网、飞行期间通信支持、遥测管理、手控支持5个主要方面论述了与以往载人飞船的区别,提出了相应解决途径。
2 交会对接及组合体模式下的数据管理
交会对接任务对飞船数据管理的要求包括:①在原有飞船数管功能的基础上,提供对接前与目标飞行器的空-空通信链路和对接后与目标飞行器的直接数据交换链路,用来实现为目标飞行器代传地面控制指令、下行部分遥测数据,向目标飞行器发送手控指令,由目标代传下行遥测和代转地面上行注入数据等功能;②由于飞行阶段、飞行模式的增多,要求飞船的遥测模式效率更高、更灵活;③由于交会对接任务中,航天员可参与的操作和控制大大增多,要求提供更多对航天员手动控制的支持,且具备可扩展性,可以支持不同飞船的不同任务。
针对上述需求,飞船数据管理系统从分系统结构、总线管理、飞行器间通信、遥测管理和手控支持几方面提出了技术实施途径,最大限度地适应飞行模式变化,利用信道能力,实现信道的动态调度,适应不同任务阶段的变化和需求。
2.1 数据管理分系统结构
为满足载人飞船交会对接任务的特点和需求,数管分系统在原有体系结构的基础上进行了改进,增加了一套总线即两套串行数据总线进行数据通信,一套为运输飞船的主总线,一套为与目标飞行器对接用的对接总线,目的是为了保证在对接和分离过程中,主总线与对接总线完全物理隔离,运输飞船主总线不会由于与目标飞行器动态组网,造成总线的主线阻抗瞬间不匹配而影响主总线通信质量,从而保证运输飞船总线通信的安全和可靠。对接总线平时不工作,只有当对接完成后进入组合体飞行阶段时才工作。
为满足多舱段结构和舱段分离的飞行特点,使舱段分离后各舱段都能正常工作,载人飞船需配置6个总线开关用于总线通、断时切换匹配电阻。其中返回舱4个,包括:与推进舱的对接面2个、与轨道舱的对接面2个,分别用于推进舱与返回舱分离、轨道舱和返回舱分离控制。轨道舱2个,安装在与目标飞行器的对接面,用于与目标飞行器的对接和分离控制。由于在舱段分离后推进舱总线系统不需要继续工作,所以推进舱一侧不配置总线开关。
2.2 总线并网实现策略
为保障载人飞船独立飞行中数据通信和停靠时,组合体数据通信质量及通信的安全、可靠、互不影响,设计了双1553B 数据总线通信模式,连接方式如图1所示。其中一套是用于飞船内部通信的主总线,另一套是用于组合体两飞行器通信的对接总线。飞船主总线在全部飞行阶段均工作。CTU 是作为主总线的总线控制器(BC),负责整个总线网络的管理;其它挂接在1553B 总线上的设备为远置终端(RT),包括RTU、DTCU、CRU 以及其它分系统设备。CTU 经过主1553B总线,可以实现载人飞船各分系统设备的信息交换和数管分系统内部的管理与控制。
载人飞船总线与目标飞行器总线采用间接连接方式,1553B 总线的主线通过RTU 对总线开关的控制选择总线的通断。总线导通时,总线的主线通过穿舱插头与目标飞行器的总线主线相连。总线断开时,总线的主线由程控指令切换到匹配负载一端。
对接总线平时不工作,只有当对接完成后进入组合体飞行阶段时才工作。目标飞行器的数据转换器作为对接总线的BC,载人飞船的两个RTU 作为RT 端与BC 进行总线通信,两个RTU 作用相等,互为备份。
飞船通信协议的设计,主要考虑关键事件的高实时和高可靠要求、数据流量均衡以及手控和遥控注入等非周期突发事件的通信模式和相应的及时性。由于1553B总线通信模式为主从式,因此针对上述特点,RT 到BC通信业务以RT 设置服务请求位的方式进行,通过服务请求的数据编码区分服务请求类型。一次通信数据量如大于64byte(一条总线消息),则RT 采用循环缓冲方式,RT 端通过接收BC发送的指令数据字进行数据指针复位。对于目标代传的上行遥控注入数据格式与飞船数管遥控注入格式,飞船数管接收识别后的处理方式与飞船自身遥控注入处理方式相同。

图1 双数据总线连接方式Fig.1 Connection mode of 1553Bdata bus between two spacecraft
2.3 飞行器间数据通信支持策略
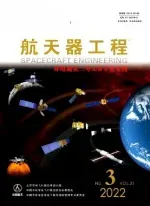
两飞行器在未对接完成组合体前,飞船与目标飞行器之间交会对接、分离、撤离过程的信息传输需要通过两飞行器数管、测控及制导、导航与控制分系统(GNC)协同配合完成。因为飞船作为追踪飞行器进行主动对接,因此需要将测量结果和控制决策及时通知目标GNC,数管通过空-空通信为此提供数据通道并保证其可靠性和安全性。具体交会对接状态信息流设计见图2。
图2 交会对接状态信息流图Fig.2 Rendezvous and docking state information stream between two spacecraft
飞船CTU 收集RTU 采集的对接机构状态数据,判断有效后转发给GNC控制器,GNC控制器综合此信息和自身收到信息后,生成交会对接状态和控制信息送CTU,CTU 判断此状态有效并且有变化后,将此部分信息按遥控格式要求生成注入数据送空-空通信机通过无线信道发送给目标GNC控制器。飞船CTU 可实时判断与对接机构通信状态,自行切换故障通道,保证通信的可靠性和安全性。同时为保证空空通信的可靠,目标的交会对接状态和控制信息间隔发送2遍,考虑到异步通信方式和采集周期,2遍的最大延时经分析和地面试验验证,满足控制要求。
两飞行器靠近时,由于地面测控站不能同时跟踪两个飞行器,飞船数管需提供目标遥测下行信道,采集空-空发送的目标飞行器遥测信息,包装成一路包装规约数据单元(E-PDU)与飞船其它遥测源包多路复用后经一路虚拟信道下传,解决了测控信道有限的问题。
上述通信过程的启动和停止,可由飞船数管按照预定条件自主实施,启动和停止时间可由地面根据任务需要注入调整。
2.4 遥测管理实现策略
由于交会对接任务在不同阶段对遥测功能有不同需求,因此要求数管分系统遥测设计能够根据需要和对接状态,实时自主切换遥测模式。传统的帧遥测模式已远远不能满足数据传输量大、工作模式、数据率和数据结构差别大的需求,因此高级在轨系统(AOS)提供的更强灵活性、更多样化的数据处理业务,更适合载人交会对接的数据管理。
根据交会对接的两飞行器的数据特点,飞船数管遥测设计选用了AOS提供的8种业务中的3种:E-PDU 业务、复路规约数据单元(M-PDU)业务、虚拟信道数据单元(VCDU)业务。物理信道只有1个主信道,在主信道中设置3个虚拟信道。遥测数据来源于1553B 总线采集的各分系统终端遥测数据和CTU 软件内部数据。
CTU 先将自身的内部参数与总线采集来的各分系统终端遥测数据,分别包装成E-PDU 并组成M-PDU,通过总线将实时部分数据输出给DTCU,出境时将延时遥测M-PDU 送CRU 中存储,过境时以RT 到RT 的方式通过总线发送给DTCU,DTCU 负责组织将数据生成VCDU 和信道存储数据单元(CADU)输出。
在遥测数据采集过程中,数管需根据被采设备状态及数据校验结果,自主或在地面干预下进行数据源及采集通道切换。
由于E-PDU 的数据来源于1553B 总线,考虑到交会对接任务特点,设计原则是:①来自于同一RT;②对应单一应用过程;③由某一特定事件触发;④周期相同。E-PDU 分为常规包和事件触发包,常规包是在某一飞行阶段持续以固定周期下传的EPDU 包;事件触发包是在某一飞行阶段中根据触发事件开始、停止下传的E-PDU 包。同一个E-PDU包,在某一飞行阶段可能是常规包,而在另一飞行阶段可能是事件触发包。
数管根据飞行阶段、关键事件及其组合条件切换遥测模式,不同遥测模式的E-PDU 组成不同,适用于不同阶段、不同应用过程的遥测需求。此策略的特点是:
(1)用户数据率变化范围大;
(2)结构上采用分层的思想,不同层具有不同功能,并采用不同的数据结构,各层的数据单元中均设置导头域[1],用于记录一些有用的信息,以便在接收端方便正确地提取用户数据;
(3)采用两种多路复用机制,即包信道的多路复用及虚拟信道的多路复用,且用户可动态分享信道,提高了空间数据信道的利用率;
(4)设置3种不同的业务,用于处理不同性质的数据;
(5)设置虚拟信道(VC),各个VC 分时占用物理信道,从而可避免长数据源垄断信道,解决了有序地管理信道的问题;
(6)设置航天器标识符,对不同航天器进行统一分配其航天器标识符,这样在目标端即可获得并区分来自不同航天器的数据。
2.5 航天员手控支持策略
原有飞船的航天员手控项目不多,包括自主应急返回和手动返回。航天员的操作为按键操作,与数管分系统的交互很少。而载人交会对接给予航天员参与的项目相比原来大大增加了,允许通过手控参与热控、推进、对接机构、总体电路、仪表、环控生保、姿态与轨道控制的交会对接测量设备[6-8]、目标飞行器检漏和自主应急返回的控制。
数管分系统对于载人飞船的程序控制的实现方式,是由CTU(即分布式系统的第一级)通过1553B串行总线,将程控指令发送给挂接在总线上执行终端(即两级分布式系统的第二级)执行的。因此航天员要实现上述交会对接任务的各项手控操作,则可以通过连接在飞船1553B 总线上的手控指令编码板向CTU 申请发送指令来实现。具体实现途径如下:
CTU 周期性地向手控编码板发送矢量字来检测其服务请求。手控编码板有两项服务请求:发送手控指令和自主应急返回请求。手控编码板如果有指令发送,则将返回的状态字包含的服务请求位置为“1”,并设置返回的1个数据字。数管CTU 如判别到手控编码板有服务请求,则根据读取返回的数据字来判别服务请求内容。如为“自主应急返回请求”,则以RT 到BC 的通信方式,读取手控编码板相应子地址的消息字,按照实施流程进行两种模式的自主应急返回程序。如为“手控编码指令请求”,则以RT 到BC 的通信方式,读取手控编码板相应子地址的消息字,根据读取的消息内容判断后,转发至被控设备执行(对于目标飞行器的手控指令,仅将目标飞行器数据区的数据字转发给有效对接RTU)。传输的手控指令消息字格式内容与自动发送的程控指令格式内容完全一致。CTU 接收手控指令完毕后,将接收回馈信息以BC 到RT 的通信方式通知手控编码板。此实现方案简单、通用、扩展性好,可以为航天员提供与自动控制能力相当的手动控制途径。
3 结束语
交会对接任务因状态变化多、不确定性多,故对数据管理要求自主程度高,飞行器内和飞行期间要求协同性好,且作为载人航天项目其对可靠性和安全性的要求更高于其他航天器。数管分系统作为载人飞船的重要平台支持系统,在兼顾原有载人飞行任务的基础上,采用成熟技术与新技术相结合,既能完成飞船在轨独立运行、返回、逃逸救生的任务,又能很好地适应和支持两飞行器的交会对接任务。经过我国无人和载人交会对接两次飞行任务验证,证明载人飞船交会对接及组合体模式下数据管理方案设计合理,可靠性和安全性高,为后续航天器交会对接任务奠定了坚实的基础。
(References)
[1]谭维炽,顾莹琦.空间数据系统[M].北京:中国科学技术出版社,2004
Tan Weichi,Gu Yingqi.Space data system[M].Beijing:China Science and Technology Press,2004(in Chinese)
[2]朱仁璋.航天器交会对接技术[M].北京:国防工业出版社,2007
Zhu Renzhang.Rendezvous and docking technigues of spacecraft[M].Beijing:National Defense Industry Press,2007(in Chinese)
[3]林来兴.空间交会对接技术[M].北京:国防工业出版社,1995
Lin Laixing.Space rendezvous and docking technology[M].Beijing:National Defense Industry Press,1995(in Chinese)
[4]Fehse W.Automated rendezvous and docking of spacecraft[M].London:Cambridge University Press,2003
[5]戚发轫.载人航天器技术[M].北京:国防工业出版社,2003
Qi Faren.Manned spacecraft technology[M].Beijing:National Defense Industry Press,2003(in Chinese)
[6]吴宏鑫,胡海霞,解永春,等.自主交会对接若干问题[J].宇航学报,2003,24(2):132-137
Wu Hongxin,Hu Haixia,Xie Yongchun,et al.Some issue of rendezvous and docking[J].Journal of Astronautics,2003,24(2):132-137(in Chinese)
[7]Eatherley G J,Petriu EM.A fuzzy controller for vehicle rendezvous and docking[R].New York:IEEE Transactions on Instrumentation and Measurement,1995,44(3):810-814
[8]Ohmine H,Yabushita T,Tanabe K.Communication analyisi with ISS structure on HTV approach,AIAA-2007-3263[R].Washington:AIAA,2007