变后掠翼航弹滑翔弹道优化设计
2012-12-25李伟明孙瑞胜吴军基刘鹏云
李伟明,孙瑞胜,吴军基,刘鹏云
(南京理工大学 能源与动力工程学院,南京210094)
变后掠翼航弹与固定翼航弹相比具有更强的生存和突防能力,其弹翼后掠角可根据飞行条件及作战任务的不同而变化,这使航弹可在更大的空域和速域内飞行[1],以实现亚、跨、超音速,大包线、低能耗的作战要求.为了充分发挥变后掠翼航弹飞行性能的优势,对变后掠翼航弹进行弹道优化具有重要的实际意义.
目前变后掠翼技术在导弹设计中的应用研究是国内外的热点方向,文献[2~5]分别从作动机构、理论分析和数值计算等角度深入研究了变后掠翼对飞行器气动特性的改善问题.在弹道优化方面,文献[6]针对导弹爬升-转弯段弹道优化问题,提出了一种利用具有动态初始化策略的粒子群算法对攻角指令进行优化的设计方案;文献[7]将弹道问题转化为最优控制问题,采用遗传算法对高超音速导弹的最优攻角控制律寻优以达到增程的目的;文献[8]采用纵向加速度优化指令来减小由重力引起的视线角速度误差,从而提高寻的制导精度.然而传统的弹道优化多为通过单变量控制来实现弹道增程,本文针对航弹在不同后掠角时的气动特性,提出了通过攻角及后掠角双控制量优化滑翔段弹道的方案,同时,为防止陷入局部最优,采用粒子群算法对控制量进行全局寻优.仿真结果表明,增程效果明显且弹道特性得到相应的改善,可见该方法是合理的、有效的.
1 变后掠翼航弹滑翔弹道模型
1.1 弹道模型
在无风、忽略地球自转影响、对称飞行的情况下,航弹在纵向平面内的弹道方程为
式中,速度v=Mac,Ma为马赫数;c为声速;R0为地球半径;θ为弹道倾角;阻力Fx=qSCx,升力Fy=qSCy,它们由动压q、参考面积S和气动特性决定,阻力系数Cx、升力系数Cy是攻角α、后掠角χ和Ma的函数,其值可由吹风试验和数值计算获得;ε1(α,χ)=0为控制方程.
1.2 变后掠翼气动特性分析
图1、图2分别给出了Ma=1.4时,Cx、Cy随α和χ的变化关系.可以看出,当α取定值时,Cx随χ递减,与χ近似成线性关系;而当χ取定值时,Cx随α递增,与α近似成线性关系.Cy是χ的二次函数,在0°≤α≤4°的条件下,Cy的最大值取在χ=55°处,即可变后掠弹翼处于半展开状态;而在4°≤α≤8°时,Cy的最大值随着α的增大向小后掠角状态偏移.
图1 阻力系数曲面图(Ma=1.4)
图2 升力系数曲面图(Ma=1.4)
图3、图4分别给出了Ma为0.8和1.8时,航弹升阻比随α和χ的变化关系.可看出,升阻比随α和χ成非凸域分布,最大升阻比随Ma递减,且Ma越大,升阻比非线性程度越明显.另外,在Ma与α为定值时,最大升阻比与χ呈开口向下的抛物线关系.
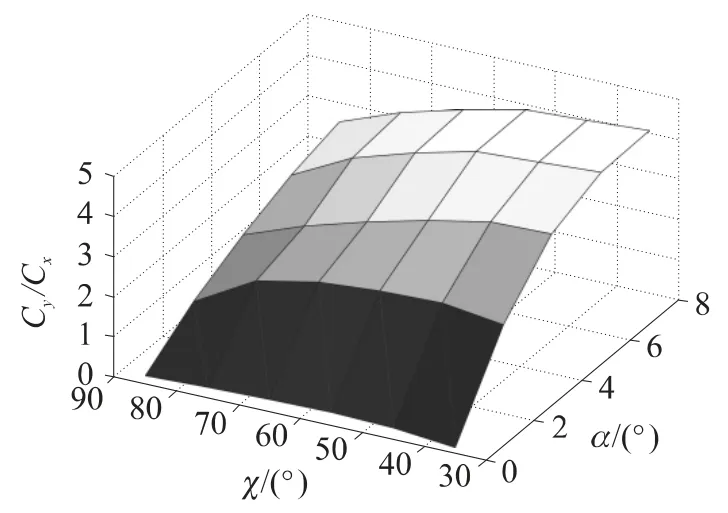
图3 升阻比曲面图(Ma=0.8)
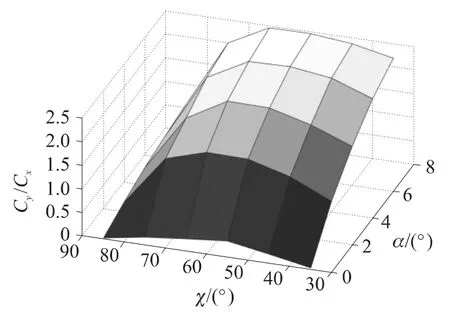
图4 升阻比曲面图(Ma=1.8)
2 弹道优化算法
2.1 性能指标及Hamilton函数
依据滑翔段弹道优化原理,航弹滑翔段飞行弹道距离最远问题是在飞行初始、末端状态已知的情况下,如何确定α(t)与χ(t)的控制律问题.因此,航弹滑翔段弹道优化的目标函数为滑翔段的水平飞行距离最大,数学描述为

该性能指标可通过优化算法对α(t)及χ(t)全局寻优的方法来实现.
根据式(1)和式(2)构造对应的Hamilton函数为
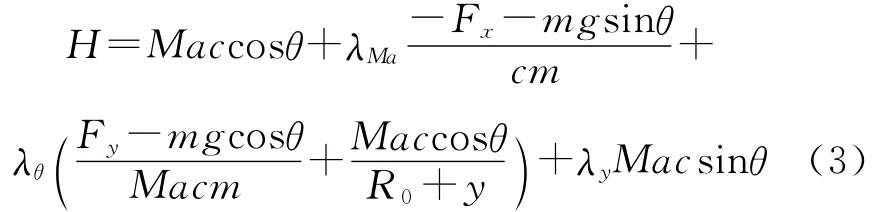
式中,λ为待定拉格朗日乘子.其欧拉方程为
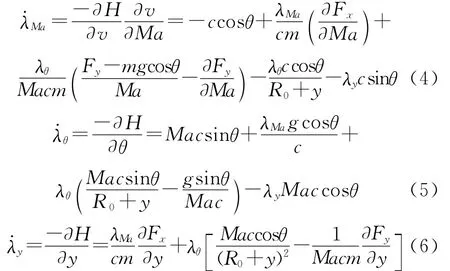
式中,
式中,∂Cx/∂Ma、∂Cy/∂Ma可通过吹风试验数据及数值计算拟合得到;密度ρ=ρ0(1-2.032 3×10-5y)4.83,地球表面大气密度ρ0=1.225kg/m3.
由Hamilton方程(3)可得:
式中,

分别为阻力系数、升力系数关于攻角的导数分别为阻力系数、升力系数关于后掠角的导数.以上各值可通过吹风试验数据及数值计算拟合得到.
由极值条件∂H/∂α=0和∂H/∂χ=0,可得:

式(9)、式(10)可作为优化算法对α(t)、χ(t)寻优的目标函数.
边界约束条件为


2.2 粒子群(PSO)优化算法
粒子群算法(PSO)[9]是一种基于群体智能的非数值并行算法,实现容易且精度高,克服了局部寻优方法的优化结果对初值敏感的缺陷,可全局寻优.
设N维目标搜索空间Xi中的群体由M个粒子构成,粒子的进化方程为

式中,n=1,2,…,N;t为迭代次数;W为惯性权重;r1n、r2n为[0,1]之间的随机数;c1、c2为学习因子;xin为第i个粒子的位置矢量;vin为粒子i的飞行速度;pin为个体极值;pgn为最优极值.
为确保对极值条件式(9)、式(10)中的α(t)和χ(t)同时寻优,本文引入权重系数σ1、σ2,将适应度函数改写为
式中,σ1+σ2=1.
3 仿真算例
以某变后掠翼航弹为例进行滑翔弹道优化设计,给定初始高度y0=12km,初始马赫数Ma0=2,初始弹道倾角θ0=0°,滑翔段末端高度yf=5km.由于该航弹后掠角变化范围为[35°,85°],在使用上述算法进行优化时,以χ/10、α为2维粒子变量,取M=20,N=2,最大迭代次数为500,W=2,c1=c2=1.628.为防止粒子离开搜索空间,将搜索空间Xi限定在[0,9]内,粒子进化速度vi限定在[-9,9]内.
图5~图9分别给出了采用本方法实现的最优控制算法和2种次优算法的滑翔段弹道对比曲线.次优方案①为固定外形:定后掠角χ(t)=35°、攻角α(t)单变量控制;次优方案②为单变量可变后掠外形:定攻角α(t)=2.5°、后掠角χ(t)单变量控制.从图中可看出,在同样的初始条件和约束条件下,最优方案所优化出的弹道飞行距离较次优方案①多13.809km,较次优方案②多6.27km,具有明显的增程效果.相对于攻角α(t)单变量控制,双变量优化使得攻角变化较平缓且能始终保持在小角度范围内变化.从图6、图7可看出,采用最优方案对α(t)及χ(t)寻优时,其结果符合变后掠翼航弹升阻比最大的分布规律,充分挖掘了航道动力学潜能,寻优结果正确,方法可行.
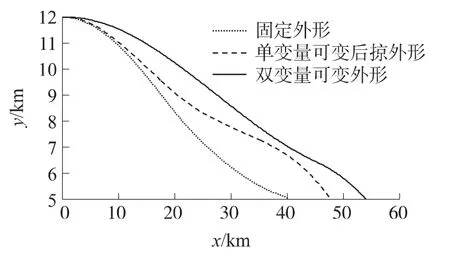
图5 滑翔段弹道轨迹比较图

图6 攻角变化曲线
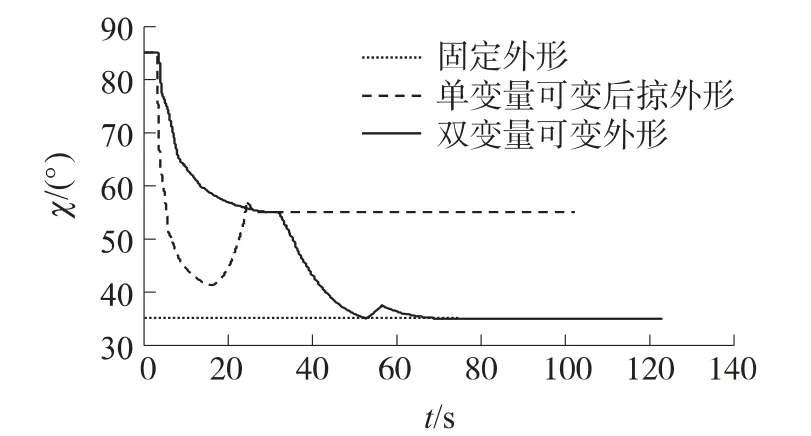
图7 后掠角变化曲线
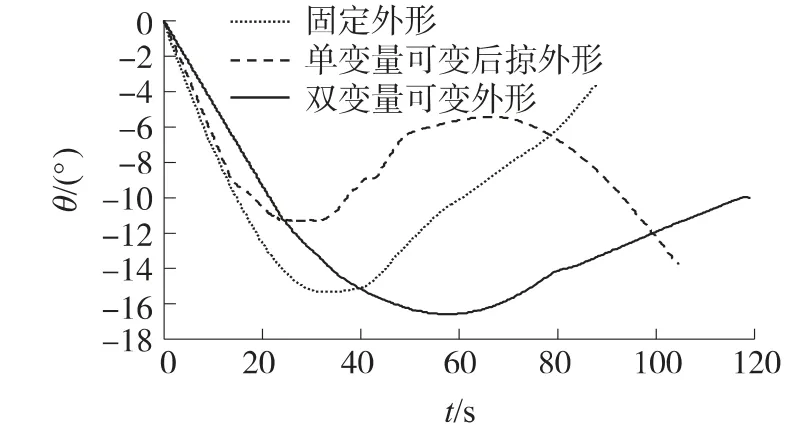
图8 弹道倾角变化曲线
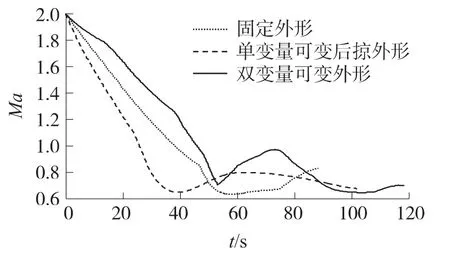
图9 飞行速度变化曲线
4 结束语
本文以某机载变后掠翼航弹滑翔增程段弹道为研究对象,结合最优控制与PSO算法进行弹道优化,分析了气动力系数随后掠角和攻角的变化规律,给出了后掠角及攻角控制量在增程中的控制规律,通过数值仿真验证了该增程优化方案的正确性和可行性,可为变后掠翼航弹的总体设计提供理论参考.
[1]TAKAHASHI T T,SPALL R J.A multi-disciplinary assessment of morphing aircraft technology applied to tactical cruise missile configuations,AIAA 2004-1725[R].2004.
[2]MARMIER P,WERELEY N M.Morphing wings of a small scale UAV using inflatable actuators sweep control,AIAA 2003-1802[R].2003.
[3]TAKAHASHI T T,SPALL R J,TUMER D C,et al.A multidisciplinary survey of advanced subsonic tactical cruise missile configurations,AIAA 2005-0709[R].2005.
[4]SNYDER M P.Vibration and flutter characteristics of a folding wing[J].Journal of Aircraft,2009,46(3):791-799.
[5]TANG L,BARTEL R E.Simulation of transonic limit cycle oscillations using a CFD time-marching method[C].42th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics and Materials Conference & Exhibit.Seattle,WA:AIAA,2001:1 263-1 265.
[6]郭杰,唐胜景,李响,等.基于改进粒子群算法的方案飞行弹道优化设计[J].北京理工大学学报,2010,30(6):688-692.GUO Jie,TANG Sheng-jing,LI Xiang,et al.Optimum design of the project trajectory based on an improved particle swarm optimization[J].Transactions of Beijing Institute of Technology,2010,30(6):688-692.(in Chinese)
[7]孙瑞胜,薛晓中,沈坚平.一种乘波外形导弹增程段弹道的最优控制解法[J].弹道学报,2008,20(4):57-60.SUN Rui-sheng,XUE Xiao-zhong,SHEN Jian-ping.Trajectory optimization for a hypersonic waverider missile in extended range period by means of optimal control[J].Journal of Ballistics,2008,20(4):57-60.(in Chinese)
[8]王红伟,唐硕,方慧,等.寻的防空导弹的一种弹道优化方法[J].弹道学报,2006,18(3):22-25.WANG Wei-hong,TANG Shuo,FANG Hui,et al.A method of trajectory optimization for homing antiaircraft missle[J].Journal of Ballistics,2006,18(3):22-25.(in Chinese)
[9]KENNEDY J,EBERHART R.Particle swarm optimization[C].Proc of IEEE Int Conf on Neural Networks.Piscataway,NJ:IEEE,1995:1 942-1 948.