基于模糊综合评判的智能行程时间预测算法
2012-12-21李庆奎吕志平葛智杰
李庆奎,吕志平,葛智杰
(1.信息工程大学测绘学院,河南郑州450052;2.解放军66011部队,北京102600;3.海军出版社,天津塘沽300450)
近年来,针对行程时间预测,学者们提出了多种预测算法,如历史趋势法[1]、卡尔曼滤波算法[2]、时间序列法[3-4]、非参数回归算法[5-6]、神经网络模型[7-8]以及模糊回归预测算法[9]等。这些算法都是基于历史数据的预测算法,面对复杂多变的实际交通状况,各算法的预测效果却不能令人十分满意。如历史趋势法不能解决非常规或突变的交通状况;卡尔曼滤波算法在每次计算时都需调整权值,计算量大,预测结果延迟时间长;时间序列法在交通状况发生急剧变化时,该算法在预测延迟方面暴露出明显的不足[1];由于非参数回归算法需要对相邻路段做复杂的调查,因此,应用于行程时间预测的非参数回归模型屈指可数;神经网络模型在数据不足时,会导致预测效果下降;模糊回归模型由于未考虑相关路段信息和路段历史流量信息对行程时间的影响,导致预测结果普遍偏小。为了得到更准确的行程时间预测结果,真实反映出道路的实时交通状况,本文将模糊理论技术引入行程时间预测算法中,考虑交通流量、占有率等实时交通信息,提出了基于模糊综合评判的智能行程时间预测算法。
1 模糊综合评判的数学模型
模糊综合评判是运用模糊方法对事物做出综合评判,其过程是把评价目标看作由多种因素组成的因素集,再设定这些因素所能选取的评审等级,组成评语的评判集,分别求出每个因素对各个评审等级的模糊矩阵,然后根据各个因素在评价目标中的权重分配,通过模糊矩阵合成,求出评价的定量解值。模糊综合评判的数学模型[10]为
B==(b1,b2,…,bn)
或
式中:“·”表示模糊运算,B=为被评对象的最终评价,A=为评价因素的权,R=为评价矩阵,其中rij表示第i个元素对第j种评语的隶属度。此时得到的最终评价为模糊量,因此需将模糊量转化成清晰量。清晰化方法可采用最大隶属度法,加权平均法[11]等。
2 基于模糊综合评判的行程时间预测模型
2.1 因素集、评判集及评判矩阵的确定
将行程时间定义为评判集V,并将行程时间划分为极短、较短、一般、较长、极长5 个等级,分别用v1,v2,v3,v4,v5表示,记为V=。将影响行程时间的实时交通信息:交通流和占有率定义为因素集U,记为U={q,o} ,则评判集的每个等级都要用因素集的两个个指标来描述。分别对交通流量q和占有率o进行评判得到模糊集R1=,R2=,于是可以确定评判集V和因素集U的评判矩阵:

评判矩阵R可由交通流量和占有率的隶属度函数求得。
2.2 隶属度函数的确定
隶属度函数的确定问题是用模糊综合评判解决具体问题的关键因素之一。隶属度函数构造的合适与否,对判断结果有着直接影响。三角形函数具有函数简单、计算方便等特点。这里将交通流量和占有率数据构造成如下三角形隶属度函数:
式中:a,b,c为待估参数(a,b为三角形隶属函数三角形的“脚”;c为三角形隶属函数三角形的“峰”);i为评判集的等级个数;j为因素集个数。
2.3 清晰化方法的确定
在清晰化的过程中将行程时间的5 个等级:极短、较短、一般、较长、极长分别与区间[c0,c1]、[c1,c2]、[c2,c3]、[c3,c4]、[c4,c5]对应,清晰化方法采用加权平均法
式中:t为行程时间,ci为行程时间各等级的上限,μi(ci)为行程时间隶属于各等级的隶属度。
3 实验验证
算例数据采用深圳市的实测数据[11],见表1。表1中的行程时间数据作为预测结果的检验数据。在此进行两个方法的解算:
方法1 基于模糊回归的行程时间预测算法[9](TBFR)。
方法2 基于模糊综合评判的智能行程时间预测算法(TBFCJ)。
在方法2中,占有率和交通流量的隶属度函数参数的选择见表2,因素权取A=(0.5,0.5)。在清晰化的过程中将行程时间的5个等级:极短、较短、一般、较长、极长分别与区间[0,40],[40,70],[70,100],[100,140],[140,185]对应,清晰化方法采用加权平均法。

表1 交通流量、占有率、行程时间数据Tab.1 Data of traffic volume,occupying rate and travel time

表2 隶属度函数参数Tab.2 Parameters of membership functions
两种行程时间预测算法的预测结果,其与行程时间真实值的对比如图1和图2。误差分析见表3,绝对相对误差见图3和图4。
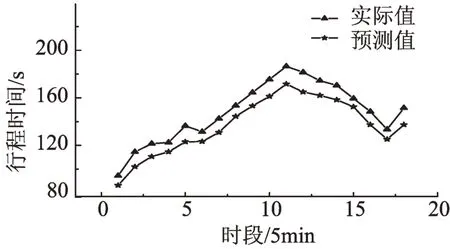
图1 基于模糊回归的行程时间预测结果Fig.1 Results of TBFR
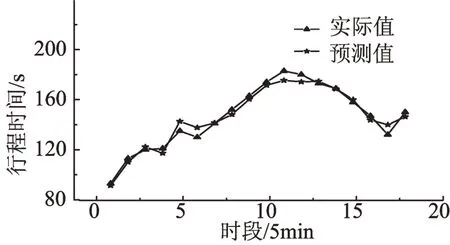
图2 基于模糊综合评判的智能行程时间预测结果Fig.2 Results of TBFCJ

图3 TBFR预测结果绝对相对误差Fig.3 Absolute and relative errors of TBFR

图4 TBFCJ预测结果绝对相对误差Fig.4 Absolute and relative errors of TBFCJ

表3 误差比较表Tab.3 Comparison of errors
从图1和图2两种行程时间实际值与预测值的对比可以看出,两种预测模型的行程时间预测值都能反映出行程时间实测值的变化趋势。但从图3、图4 和表3 可以看出,模糊综合评判预测算法的预测效果明显好于模糊回归预测算法,在最大绝对相对误差、平均绝对相对误差以及预测模型的预测值和实测值的曲线拟合程度方面都有明显的提高(均等系数大于0.9说明拟合程度较好,均等系数越大拟合度越好)。
5 结论
影响行程时间预测的因素很多,特别是实时交通信息对行程时间预测的影响。各因素与行程时间之间构成了非常复杂的非线性关系,如果将这些因素用一个统一数据模型实现对行程时间的预测是相当困难的。模糊理论技术在处理非线性关系上具有巨大优势,可以综合考虑多种因素对行程时间预测的影响,合理分配各因素的权重,实现实时、准确的行程时间预测。本文在交通流量和占有率数据的基础上,用模糊综合评判的方法对行程时间实时预测,最后通过实例验证了方法有效性、实用性和可行性。
[1]杨兆升.关于智能运输系统的关键理论——综合路径行程时间预测的研究[J].交通运输工程学报,2001,1(1):65-67.
[2]KUCHIPUDI,CHANDRA M,CHIEN,et al. Development of a hybrid model for dynamic Travel time prediction[C]//Trransponation Research Board,Annual Meeting 2002:35-39.
[3]ISHAK S,AL-DEEK H.Performance evaluation of short-term time-series traffic prediction model[J].Joumal of Transportation Engineering,2002,128(6):490-498.
[4]D’ANGELO M P,AL-DEEK H M,WANG M C.Travel-time prediction for freeway corridors[R].Transportation Research Record,1999:184-191
[5]ROBINSON,STEVE J P.Modeling urban link travel-time using data from inductive loop detectors[C]//World Conference on Transport Research,2004:58-63.
[6]BAJWA S U I,CHUNG E AND KUWALLARA M. A travel time prediction method based on pattern matching technique[C]//21st ARRB and 11th REAAA conference,Cairns,Australia,2003:56-69.
[7]VAN LINT J W C.Reliable Travel Time Prediction for Freeways[M].Delft University Press,Delft,The Netherlands,2004:121-122.
[8]PARK D AND RILETT L R.Forecasting multiple-period freeway link travel times using modular neural networks[R].Transportation Research Record,1998:163-170.
[9]杨兆升,保丽霞,朱国华.基于Fuzzy回归的快速路行程时间预测模型研究[J].公路交通科技,2004,21(3):78-81.
[10]胡宝清.模糊理论基础[M].武汉:武汉大学出版社,2010:73-74.
[11]刘金琨.智能控制[M].2版.北京:电子工业出版社,2009:45-46.
