基于RGB颜色模型的轨道轮廓识别算法*
2012-12-07李立明柴晓冬郑树彬
李立明,柴晓冬,郑树彬
(上海工程技术大学城市轨道交通学院,上海201620)
0 引言
随着铁路建设的发展,轨检测的自动化、高效化受到广泛关注。轨检测主要是为了得到轨道不平顺[1,2]的一系列参数,包括轨距、水平、方向、高低等[3]。基于图像处理的测距理论和技术的发展,利用高速CCD摄像机结合图像处理技术来精确获得轨距不平顺参数成为可能,文献[4,5]设计了基于机器视觉的轨距检测系统,可以满足和提高轨距检测精度和效率,降低检测成本。本文主要研究在基于机器视觉的轨距检测系统中,针对现场钢轨采集图像背景噪声复杂的情况,传统基于灰度图像的分割方法不足,以及边缘提取算法的速度慢等缺点,提出基于RGB模型轨道轮廓的识别算法。该算法针对系统中采用的扇形激光光源颜色特征相对固定的特点,首先提取钢轨RGB图像的R颜色特征分量,然后选择合适的背景图像与其做差影运算,实现图像的噪声去除和二值化,并准确地提取出钢轨断面轮廓。
1 RGB颜色模型
RGB 颜色模型[6,7],即红、绿、蓝(RGB)三基色模型,是基于笛卡尔坐标系,3个轴分别是R轴、G轴、B轴(图1)。对R,G,B进行归一化处理,所有的值都在区间[0,1]中。
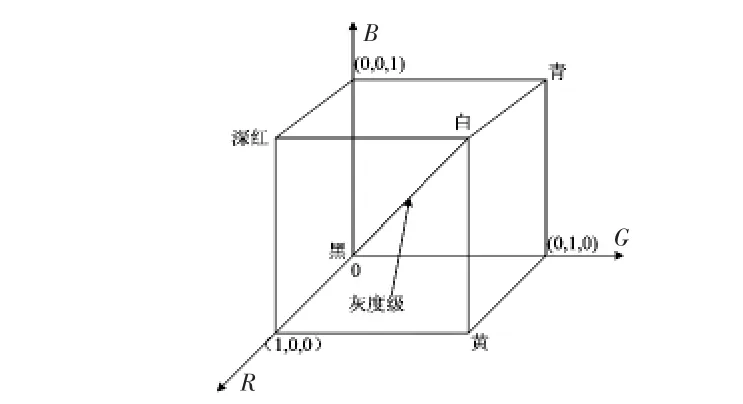
图1 RGB颜色立方体Fig 1 RGB color cube
在该模型中,从黑到白的灰度值分布在从原点到离原点最远顶点间的连线上,而立方体内其余各点对应不同的颜色,并可以用从原点到该点的向量表示。对于任何颜色C都通过改变三基色的数量混合得出,其表达式为

2 图像差影法
图像差影法可去除一幅图像中不需要的加性噪声,加性噪声可能是缓慢变换的背景阴影、周期性的噪声或者是在图像上每一像素处均已知的附加污染。差影图像提供了图像间的差异信息,能用以指导动态检测、运动目标检测和跟踪、图像背景消除及目标识别等工作。所谓差影法,就是图像的相减运算,是指把相似景物的拍摄图像或者同一景物在不同时间、不同波段的图像相减,其数学表达式如下

式中 A(x,y)为当前图像,为B(x,y)固定背景图像(匹配模版),C(x,y)为输出图像。
本算法中采用原始RGB图像的灰度图作为背景图像B(x,y),提取R分量得到灰度图像作为当前图像A(x,y)。图像在作差影法运算时,必须使两相减图像的对应像点位于空间同一目标点上。由于本算法采用同一副图像的不同颜色分量做运算,从而保证了A(x,y),B(x,y)最大程度上的空间点的匹配,两幅图像的对应点完全对应,否则,必须先作几何校正与配准。
3 二值化
图像二值化根据其对像素的处理方式,主要分为3类:1)全局阈值法;2)局部阈值法;3)动态阈值法[8],还有基于数学形态学的二值化方法。为满足实动态图像处理要求,算法中二值化采用基于像素的全局阈值法。对于图像C(x,y),记T为前景与背景的分割阈值,前景点数占图像比例为w0,平均灰度为u0;背景点数占图像比例为w1,平均灰度为u1。图像的总平均灰度为

从最小灰度值到最大灰度值遍历T,当T使得方差值

δ2最大时,T即为分割的最佳值。
4 轮廓提取
对得到的二值图像采用Hilditch细化算法,其主导思想是每次扫描删除图像上目标的轮廓像素,直到图像上不存在可删除的轮廓像素为止,最终得到一个像素宽度的钢轨断面轮廓线。
5 实验结果分析
实验采用德国AVT CCD摄像机,像素分辨率为1280×960,并采用输出波长为635nm的红色扇形结构光源。在实验线路上拍摄钢轨断面图像,图2(a)为原始RGB图像,(b)为拉普拉斯边缘锐化灰度图像,(c)锐化后图像的灰度直方图,图3为采用传统的基于灰度图的图像在不同阈值T下的分割结果。
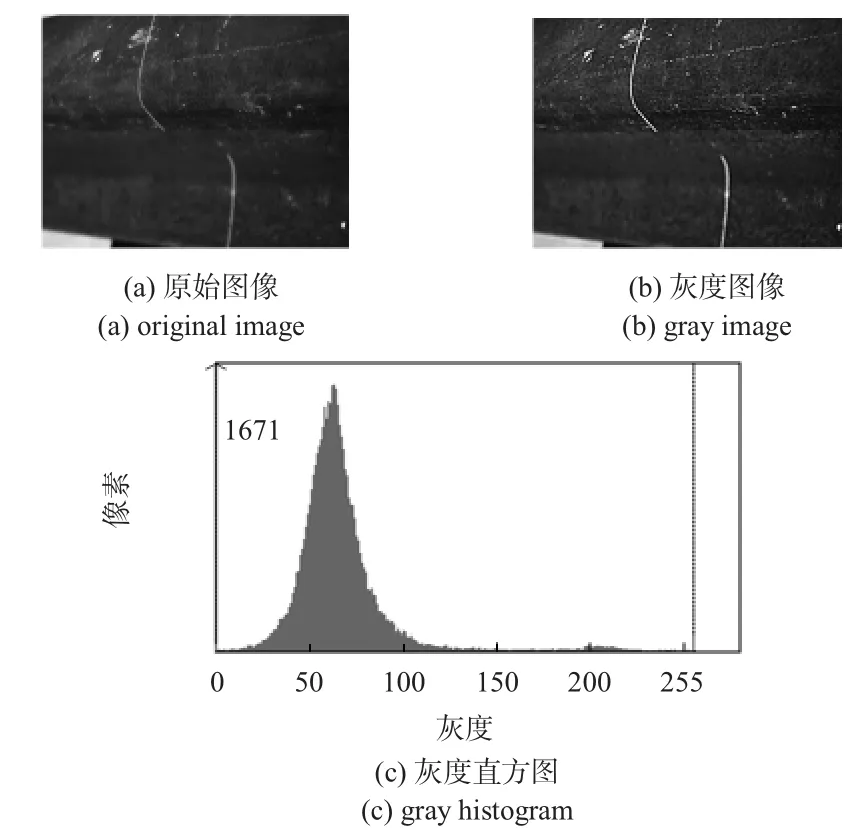
图2 图像预处理Fig 2 Image preprocessing
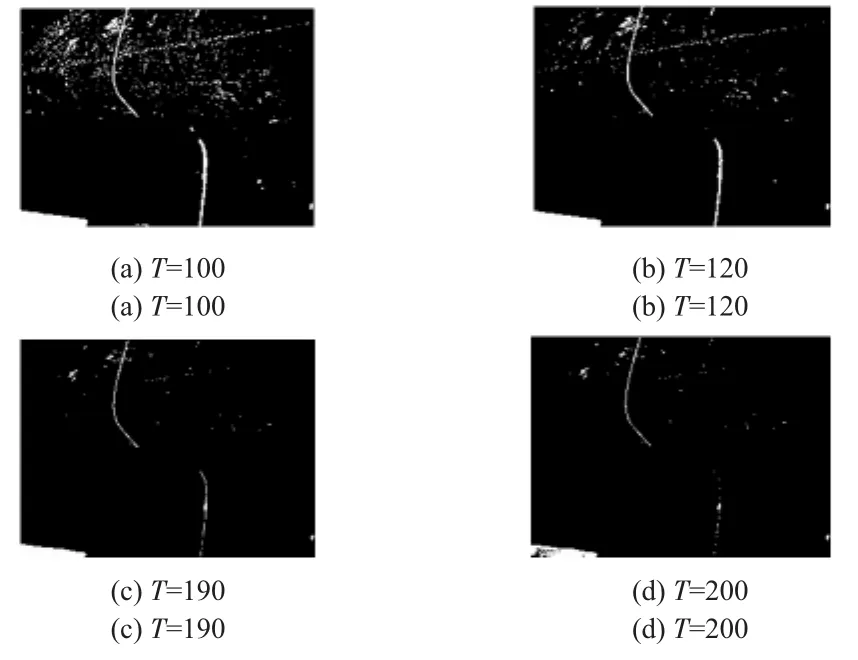
图3 图像分割Fig 3 Image segmentation
在基于机器视觉的轨距检测系统中,采用扇形激光光源照射到钢轨内侧面,在轨面和轨腰上形成红色激光光带。在实际采集图像过程中,由于外部环境(光照)发生变化和轨面轨腰噪声的干扰,通过灰度直方图可以观察出,红色光带所占用的有效像素的分布很小,基本完全淹没于背景之中。图像分割算法中,选取的分割阈值是关键,但从实际效果看,选择不同的阈值无法完全消除轨面和轨腰可能出现的“光斑”干扰,“光斑”的存在为提取钢轨轮廓带来了随机的噪声干扰。传统的基于灰度图像的直方图阈值分割方法[9,10],由于激光带有效像素密度较小,无法准确分割目标区域和背景区域。
针对随机干扰,本算法由于是对同一幅图像的不同颜色分量直接运算,可完全消除背景噪声和轨面亮斑干扰。同时考虑现场光照变化,采用本算法对不同光照条件下采集的图像作对比研究,图4为在不同光照条件下对同一位置采集的图像和应用算法提出到的钢轨轮廓断面。
将本算法用于基于机器视觉的轨距检测系统中,对同一轨距测量点,在4组不同光照条件下分别测量20次,得到轨距数据,见表1和图5。
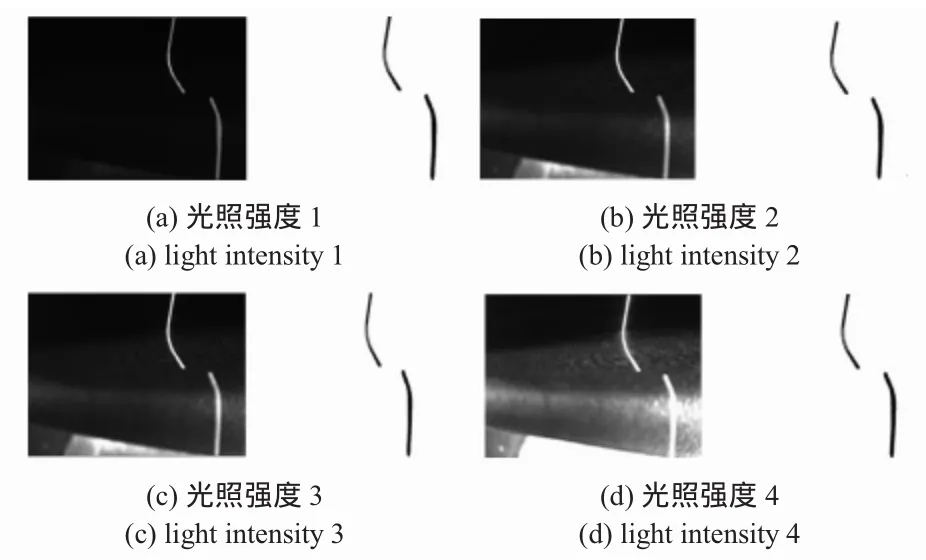
图4 不同光照强度下轮廓提取Fig 4 Contour extraction under different illumination
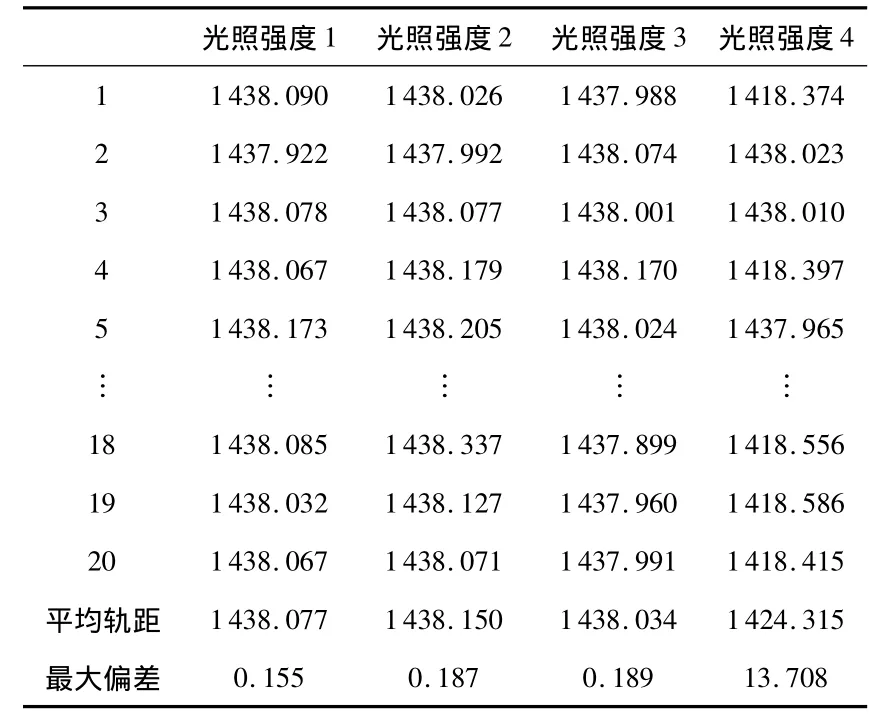
表1 不同光照下测量的轨距(单位:mm)Tab 1 Measured gauge under different illumination(Units:mm)
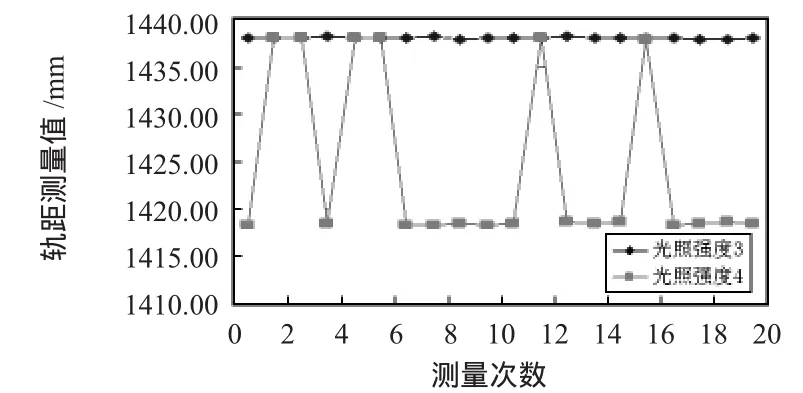
图5 轨距检测曲线Fig 5 Gauge detecting curves
在基于机器视觉的轨距检测系统的测量中,轨距测量精度达μm级,从测量结果观察,在一定范围内的光照强度,采用本算法对轨距测量影响较小,最大偏差小于0.2 mm;光照强度超过一定阈值后,本算法无法准确捕捉轨距测量点,轨距测量数据出现跳跃,轨距测量误差较大,最大偏差达到13.7 mm。
6 结论
本文采用基于RGB模型的轨道轮廓识别算法,根据钢轨轮廓线颜色与背景颜色的差异[11],成功识别提取了钢轨轮廓线,消除了背景噪声的干扰,从图像处理结果与轨距测量结果观察,随着光照强度的增加,对本算法有一定的影响,但在一定光照范围之内,本算法具有较好的鲁棒性。
[1]Esveld C.Principles of track quality,recording and assessment[J].Rail International,1992,23(1):10-18.
[2]杜鹤亭.长波长轨道不平顺检测中的数字滤波方法[J].中国铁道科学,2000,21(4):58-64.
[3]余祖俊.轨道交通线路几何安全状态动态检测技术研究[D].北京:北京交通大学,2008.
[4]郑树彬,柴晓冬,李立明,等.基于机器视觉的轨距检测系统设计[J].机车电传动,2010(6):70-74.
[5]郑树彬,柴晓冬,韩国阁,等.基于光平面的轨距测量方法[J].城市轨道交通研究,2010,13(9):22-25.
[6]符宝鼎,袁建畅,郭彩霞.基于RGB颜色模型棉花杂质的识别算法[J].北京纺织,2005(5):48-51.
[7]陈志国,须文波.一种机器视觉异纤高速清除系统[J].计算机工程与应用,2010,46(10):200-201.
[8]王 民,文义玲.常用图像去噪算法的比较与研究[J].西安建筑科技大学学报:自然科学版,2010,42(6):895-898.
[9]李海峰,杜军平.颜色特征的图像分类技术研究[J].智能系统学报,2008,3(2):156-158.
[10]黄学军,邢爱凤,解培中.综合利用边缘和颜色特征的图像检索[J].南京邮电学院学报,2004,24(1):27-30.
[11]Manjunath B S,Ohm JR,Vasudenvan V V,et al.Color and texture descriptors[J].IEEE Trans on CSVT,2001,11(6):703-715.