基于AMI 602传感器的载体姿态测试系统
2012-12-07陈志保常丹华朱绍图
荆 雷,陈志保,常丹华,朱绍图
(燕山大学信息科学与工程学院,河北秦皇岛066004)
0 引言
姿态分析仪是现代社会中的一种非常重要的测试工具,人们通过它可以更加便捷地确定物体的航向和姿态信息。传统的姿态测量系统主要由高精度的陀螺仪和加速度传感器组成,需要外接信号调理电路和A/D转换器,其结构复杂、体积较大、成本较高,无法实现设备的小型化、便携化和商品化。
本文设计的姿态测量系统是由基于数字输出的6维动作传感器而研制,该传感器集三轴加速度传感器和三轴地磁传感器于一体,且内部包含A/D转换电路、放大信号调理电路和补偿电路。与传统的加速度传感器与地磁传感器在外部结合的捷联式设计相比,该系统提高了抗外界干扰的能力、消除了2只传感器之间的坐标误差,并且能够全方位准确地测量姿态角的角度,具有较高的精度[1]。由于6维动作传感器是数字输出,支持I2C协议,因此,其抗干扰能力优于模拟输出的传感器,同时便于同微处理器进行通信。
1 系统设计方案
本文设计的姿态测试系统主要由两部分组成,即数据采集系统和数据接收系统。数据采集系统负责将传感器输出的6维数字信号经微处理器发射出去。数据接收系统负责接收发射端发射来的数据。接收端接收到的数据通过串口发送到PC机上进行数据的处理。系统的整体结构框图如图1所示。
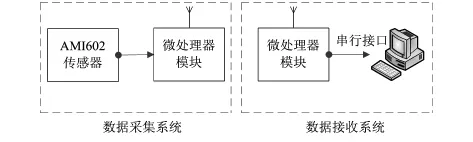
图1 系统整体结构框图Fig 1 Overall structure block diagram of system
2 硬件电路设计
2.1 传感器模块
一般捷联式姿态测试系统采用的是双轴加速度传感器和三轴地磁传感器,需要外接A/D转换器、信号调理等电路,结构比较复杂,存在外界的干扰信号,精确度难以保证[2]。而本系统采用的是AMI 602动作传感器进行测量,A/D转换在芯片内部完成,也不需要对2只传感器的坐标系进行校正,同时解决了5维传感器对俯仰角、横滚角测量角度很难大于70°的局限性,如图2所示。
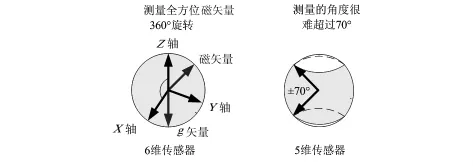
图2 6维传感器与5维传感器角度测量对比Fig 2 Comparison of angle measurement of 6D sensor and 5D sensor
AMI 602传感器是由日本爱知制钢公司2008年7月推出的一种具有数字输出的动作传感器。AMI 602动作传感器主要包含三轴加速度传感器与三轴地磁传感器以及控制器IC。控制器IC包含地磁信号检测电路、能够补偿每轴偏移和设置灵敏度的放大电路、温度传感器、12位ADC、I2C串行输出电路、恒压电路及控制它们的8032微处理器[3]。内部结构框图如图3所示。
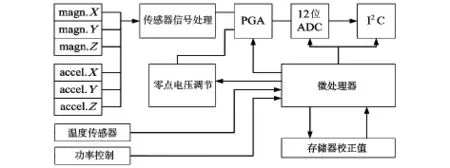
图3 AMI602传感器内部结构框图Fig 3 Inner structure block diagram of AMI602 sensor
2.2 微处理器模块
本系统选择由德州仪器推出的一种专为低功耗和低压无线应用而设计的CC1110单片机作为微处理器。芯片内部包含了一个符合工业标准的增强型8051MCU和一个无线收发芯片CC1100。采用32.768 kHz低速晶振和26 MHz高速晶振,方便系统根据不同需要进行灵活设置。每兆赫兹下微处理器的执行速度是普通8051内核的8倍。8051MCU自带4kB RAM,具有一个16位的定时器,支持定时、计数、输入捕获等功能,具有3个8位的定时器,一个看门狗定时器。具有4种工作模式,PM0~PM3,其中,PM0为正常工作模式,PM1~PM3为低功耗模式。实际应用中可以根据需要,选择不同的工作模式来降低系统功耗[4]。
3 姿态角的求解
3.1 坐标原点的标定
直接从传感器所测得的数据(x',y',z')和真实数据(x,y,z)的坐标原点存在着偏移量OO',会对后续的姿态角的计算带来影响,如图4所示,所以,首先必须对CC1110传输来的各轴数据进行调零处理。由于重力加速度和磁场强度在垂直方向上的大小都是常量,所以,将三轴分别垂直向上和垂直向下测得的重力加速度和磁场强度数据进行平分,使其各轴在垂直向上和向下时的数据值大小相等,同时在数据中加一位符号位,规定任意轴指向上方为正,指向下方为负,最后将传感器测得的数据进行转换。
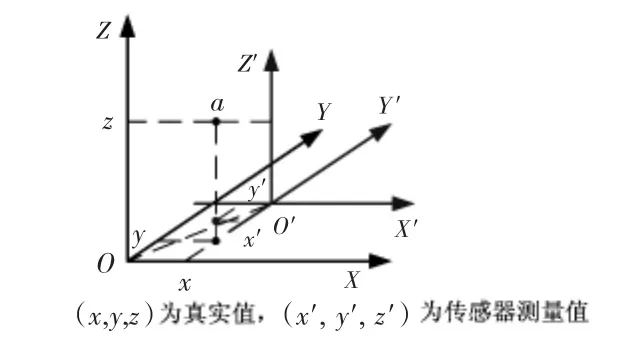
图4 坐标原点的偏移量补偿Fig 4 Offset compensation of coordinate origin point
3.2 姿态角的推导
由图5可推证有下式成立
俯仰角、横滚角、磁偏航角分别为
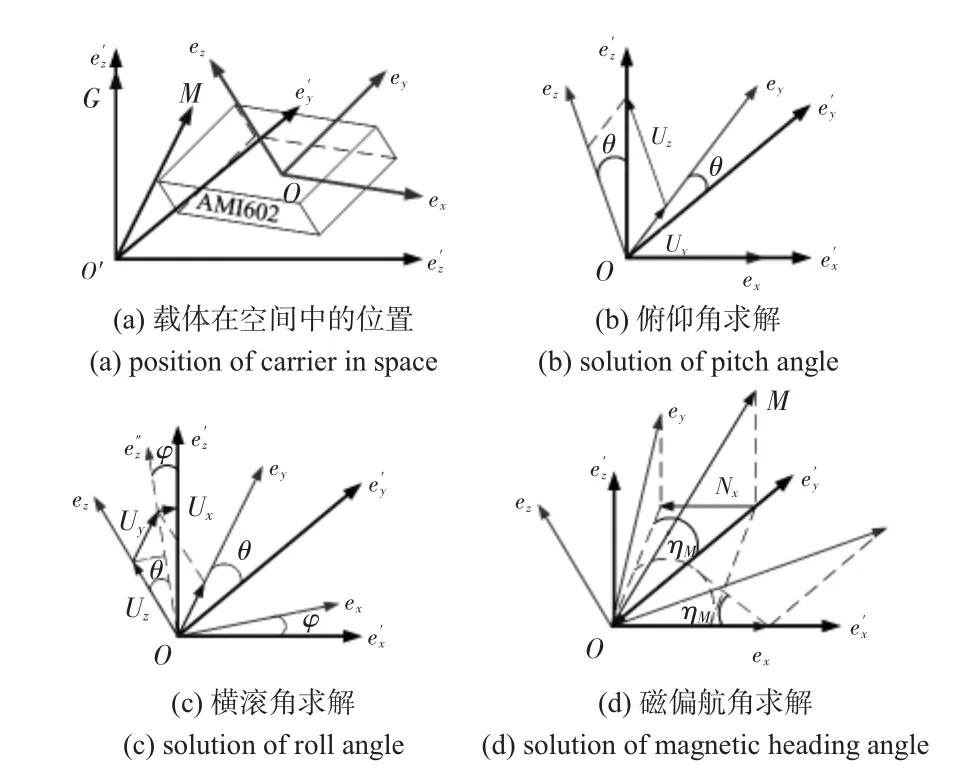
图5 载体姿态与地理坐标系之间的关系Fig 5 Relation between carrier attitude and geo-coordinate system
载体在空间中的姿态是相对于地理坐标系的运动来表示的,运动的角度称为载体的姿态角,包括俯仰角、横滚角和偏航角,如图5。本文通过重力加速度G和磁场强度M,运用“左手法则”确定3维地理坐标系O'e'xe'ye'z,地理坐标系是系统的参考坐标系,载体坐标系设为Oexeyez,式(1)表示传感器测得的6维数据在地理坐标系下所对应的值,式(2)为俯仰角θ、横滚角φ、磁偏航角ηM的计算公式[5]。
4 实验结果测试与分析
为了能够更准确地显示出测量的真实值,测量实验在水平台面上进行,用角度测量仪对角度进行标定,测量结果以文本方式保存起来,每个姿态角随机各选取了9个度数进行测量,每个角度测量了5次,结果如表1~表3所示。
由上述的测量数据可以看出:在 0°,90°,180°,270°这几个特殊度数左右存在数据符号的正负变换,所以,必须做模糊处理以保证角度的正确性。测量结果表明:该系统具有较高的分辨率,精度在±0.5°以内,可用于一般民用的姿态测试系统的应用。
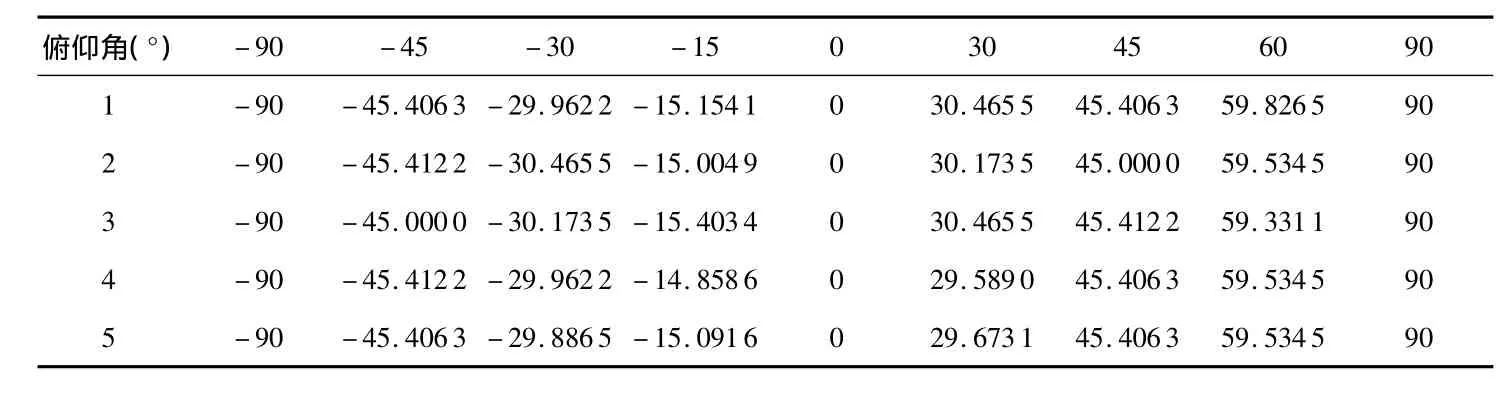
表1 俯仰角标准值与测量值对比Tab 1 Comparison of standard and measurement value of pitch angle
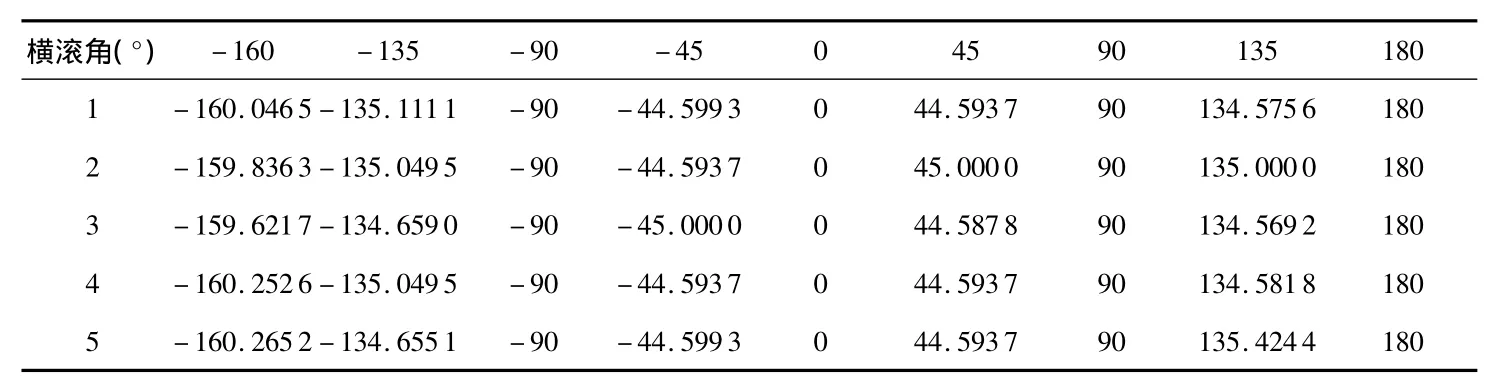
表2 横滚角标准值与测量值对比Tab 2 Comparison of standard and measurement value of roll angle
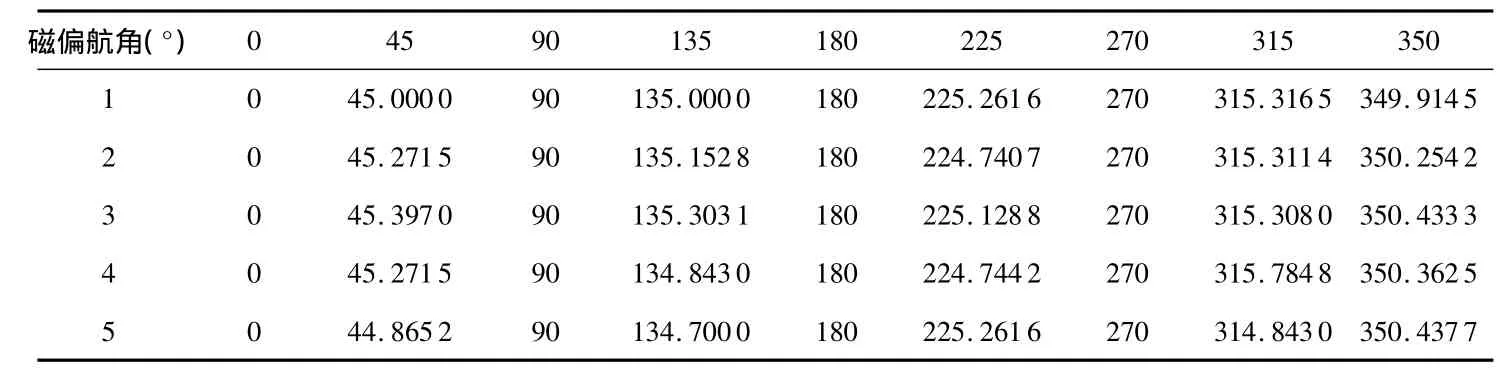
表3 偏航角标准值与测量值对比Tab 3 Comparison of standard and measurement value of heading angle
5 结束语
本文详细介绍了一种基于AMI 602的6维动作传感器的空间姿态的测量系统。采用AMI 602传感器能大大缩小系统的体积,降低系统功耗,提高了方位精度,同时使系统的可靠性得到了显著的提高。该系统具有很好的工程实用价值,适合在各种导航、游戏设备、嵌入式装置及3D鼠标等上使用。由于在运动过程中有动态加速度的存在,会给测量精度带来一定的影响,为了解决这一问题,可以结合其他设备提供的动态加速度信息进行校正[8]。
[1]鲍松堂.磁阻传感器及其在飞行体姿态测试中的应用[J].五邑大学学报:自然科学版,2010,24(2):52-55.
[2]马建仓,胡士峰,邵婷婷.三轴磁阻电子罗盘设计[J].火力与指挥控制,2009,34(3):142-144.
[3]AMI602 Datasheet.Aichi Micro Intelligent Corporation[EB/OL].[2010—11—13]http:∥www.aichi-mi.com.
[4]CC1110 Datasheet.Texas Instruments[EB/OL].[2010—11—13]http:www.ti.com.
[5]李怀昆.电子罗盘中磁场测量系与重力场测量系之间关系的研究[D].哈尔滨:哈尔滨工程大学,2007.
[6]王解先,李浩军.磁偏角与磁倾角的公式推导与运算[J].大地测量与地球动力学,2009,29(3):88-94.